[ROS] 安装Gazebo 使用Gazebo 实现摄像头仿真 雷达仿真 Kinect仿真
安装GazeopGazeop是一款仿真软件,和ROS有非常好的兼容性,通常来说使用rviz就可以满足绝大部分需求,但是要考虑真实世界的物理属性的话(比如摩擦力,空气阻力,湿度,地面凹凸程度等),就需要用到Gazepo1.添加源sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_relea
目录
安装Gazebo
Gazeop是一款仿真软件,和ROS有非常好的兼容性,通常来说使用rviz就可以满足绝大部分需求,但是要考虑真实世界的物理属性的话(比如摩擦力,空气阻力,湿度,地面凹凸程度等),就需要用到Gazepo
1.添加源
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
2.安装gazebo
sudo apt-get update
sudo apt-get install gazebo7
sudo apt-get install libgazebo7-dev
使用Gazepo 实现摄像头仿真
1.工作空间与功能包的创建
//创建工作空间
$ source /opt/ros/kinetic/setup.zsh
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
$ cd ~/catkin_ws
$ catkin_make
$ souce ~/catkiin_ws/devel/setup.zsh
$ cd ~/catkin_ws/src
//创建功能包
$ catkin_create_pkg my_gazebo gazebo_plugins gazebo_ros gazebo_ros_control roscpp rospy
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.zsh
//创建目录结构
$ cd ~/catkin_ws/src/my_gazebo
$ mkdir worlds launch
2)Gazebo配置文件
请按照下列方式命名,或修改launch文件
$ cd world
$ touch playground.world
该文件由Gazebo界面配置后导出,非手动编写,复制即可
<sdf version='1.4'>
<world name='default'>
<light name='sun' type='directional'>
<cast_shadows>1</cast_shadows>
<pose>0 0 10 0 -0 0</pose>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.2 0.2 0.2 1</specular>
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>0.5 0.1 -0.9</direction>
</light>
<scene>
<ambient>0.4 0.4 0.4 1</ambient>
<background>0.7 0.7 0.7 1</background>
<shadows>1</shadows>
</scene>
<physics type='ode'>
<max_step_size>0.01</max_step_size>
<real_time_factor>1</real_time_factor>
<real_time_update_rate>100</real_time_update_rate>
<gravity>0 0 -9.8</gravity>
</physics>
<model name='bookshelf'>
<static>1</static>
<link name='link'>
<inertial>
<mass>1</mass>
</inertial>
<collision name='back'>
<pose>0 0.005 0.6 0 -0 0</pose>
<geometry>
<box>
<size>0.9 0.01 1.2</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<visual name='visual1'>
<pose>0 0.005 0.6 0 -0 0</pose>
<geometry>
<box>
<size>0.9 0.01 1.2</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Wood</name>
</script>
</material>
</visual>
<collision name='left_side'>
<pose>0.45 -0.195 0.6 0 -0 0</pose>
<geometry>
<box>
<size>0.02 0.4 1.2</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<visual name='visual2'>
<pose>0.45 -0.195 0.6 0 -0 0</pose>
<geometry>
<box>
<size>0.02 0.4 1.2</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Wood</name>
</script>
</material>
</visual>
<collision name='right_side'>
<pose>-0.45 -0.195 0.6 0 -0 0</pose>
<geometry>
<box>
<size>0.02 0.4 1.2</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<visual name='visual3'>
<pose>-0.45 -0.195 0.6 0 -0 0</pose>
<geometry>
<box>
<size>0.02 0.4 1.2</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Wood</name>
</script>
</material>
</visual>
<collision name='bottom'>
<pose>0 -0.195 0.03 0 -0 0</pose>
<geometry>
<box>
<size>0.88 0.4 0.06</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<visual name='visual4'>
<pose>0 -0.195 0.03 0 -0 0</pose>
<geometry>
<box>
<size>0.88 0.4 0.06</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Wood</name>
</script>
</material>
</visual>
<collision name='top'>
<pose>0 -0.195 1.19 0 -0 0</pose>
<geometry>
<box>
<size>0.88 0.4 0.02</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<visual name='visual5'>
<pose>0 -0.195 1.19 0 -0 0</pose>
<geometry>
<box>
<size>0.88 0.4 0.02</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Wood</name>
</script>
</material>
</visual>
<collision name='low_shelf'>
<pose>0 -0.195 0.43 0 -0 0</pose>
<geometry>
<box>
<size>0.88 0.4 0.02</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<visual name='visual6'>
<pose>0 -0.195 0.43 0 -0 0</pose>
<geometry>
<box>
<size>0.88 0.4 0.02</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Wood</name>
</script>
</material>
</visual>
<collision name='high_shelf'>
<pose>0 -0.195 0.8 0 -0 0</pose>
<geometry>
<box>
<size>0.88 0.4 0.02</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<visual name='visual7'>
<pose>0 -0.195 0.8 0 -0 0</pose>
<geometry>
<box>
<size>0.88 0.4 0.02</size>
</box>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Wood</name>
</script>
</material>
</visual>
<velocity_decay>
<linear>0</linear>
<angular>0</angular>
</velocity_decay>
<self_collide>0</self_collide>
<kinematic>0</kinematic>
<gravity>1</gravity>
</link>
<pose>0 1.53026 0 0 -0 0</pose>
</model>
<model name='jersey_barrier'>
<static>1</static>
<link name='link'>
<visual name='visual'>
<geometry>
<mesh>
<uri>model://jersey_barrier/meshes/jersey_barrier.dae</uri>
</mesh>
</geometry>
</visual>
<collision name='upright'>
<pose>0 0 0.5715 0 -0 0</pose>
<geometry>
<box>
<size>4.06542 0.3063 1.143</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<collision name='base'>
<pose>0 0 0.032258 0 -0 0</pose>
<geometry>
<box>
<size>4.06542 0.8107 0.064516</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<collision name='base2'>
<pose>0 0 0.1 0 -0 0</pose>
<geometry>
<box>
<size>4.06542 0.65 0.1</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<collision name='base3'>
<pose>0 0 0.2 0 -0 0</pose>
<geometry>
<box>
<size>4.06542 0.5 0.1</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<collision name='left-angle'>
<pose>0 -0.224 0.2401 0.9 -0 0</pose>
<geometry>
<box>
<size>4.06542 0.5 0.064516</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<collision name='right-angle'>
<pose>0 0.224 0.2401 -0.9 0 0</pose>
<geometry>
<box>
<size>4.06542 0.5 0.064516</size>
</box>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<velocity_decay>
<linear>0</linear>
<angular>0</angular>
</velocity_decay>
<self_collide>0</self_collide>
<kinematic>0</kinematic>
<gravity>1</gravity>
</link>
<pose>-4 -1 0 0 -0 -0.7</pose>
</model>
<model name='ground_plane_0'>
<static>1</static>
<link name='link'>
<collision name='collision'>
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<surface>
<friction>
<ode>
<mu>100</mu>
<mu2>50</mu2>
</ode>
</friction>
<bounce/>
<contact>
<ode/>
</contact>
</surface>
<max_contacts>10</max_contacts>
</collision>
<visual name='visual'>
<cast_shadows>0</cast_shadows>
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grey</name>
</script>
</material>
</visual>
<velocity_decay>
<linear>0</linear>
<angular>0</angular>
</velocity_decay>
<self_collide>0</self_collide>
<kinematic>0</kinematic>
<gravity>1</gravity>
</link>
<pose>0.497681 0 0 0 -0 0</pose>
</model>
<state world_name='default'>
<sim_time>0 0</sim_time>
<real_time>0 44986</real_time>
<wall_time>1377677575 940727583</wall_time>
<model name='Dumpster'>
<pose>1 -3.44458 0 0 -0 0</pose>
<link name='link'>
<pose>1 -3.44458 0 0 -0 0</pose>
<velocity>0 0 0 0 -0 0</velocity>
<acceleration>0 0 0 0 -0 0</acceleration>
<wrench>0 0 0 0 -0 0</wrench>
</link>
</model>
<model name='cube_20k'>
<pose>1.41131 -1 0 0 -0 0.9</pose>
<link name='link'>
<pose>1.41131 -1 0.5 0 -0 0.9</pose>
<velocity>0 0 0 0 -0 0</velocity>
<acceleration>0 0 0 0 -0 0</acceleration>
<wrench>0 0 0 0 -0 0</wrench>
</link>
</model>
<model name='unit_cylinder_1'>
<pose>-2 -3.4888 0.5 0 -0 0</pose>
<link name='link'>
<pose>-2 -3.4888 0.5 0 -0 0</pose>
<velocity>0 0 0 0 -0 0</velocity>
<acceleration>0 0 0 0 -0 0</acceleration>
<wrench>0 0 0 0 -0 0</wrench>
</link>
</model>
</state>
<gui fullscreen='0'>
<camera name='user_camera'>
<pose>1.33336 -0.422442 27.6101 3e-06 1.5698 3.04015</pose>
<view_controller>orbit</view_controller>
</camera>
</gui>
<model name='unit_cylinder_1'>
<pose>-2 -3.4888 0.5 0 -0 0</pose>
<link name='link'>
<inertial>
<mass>1</mass>
<inertia>
<ixx>1</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>1</iyy>
<iyz>0</iyz>
<izz>1</izz>
</inertia>
</inertial>
<collision name='collision'>
<geometry>
<cylinder>
<radius>0.5</radius>
<length>1</length>
</cylinder>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<visual name='visual'>
<geometry>
<cylinder>
<radius>0.5</radius>
<length>1</length>
</cylinder>
</geometry>
<material>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/Grey</name>
</script>
</material>
</visual>
<velocity_decay>
<linear>0</linear>
<angular>0</angular>
</velocity_decay>
<self_collide>0</self_collide>
<kinematic>0</kinematic>
<gravity>1</gravity>
</link>
<static>0</static>
</model>
<model name='Dumpster'>
<link name='link'>
<collision name='collision'>
<geometry>
<mesh>
<uri>model://dumpster/meshes/dumpster.dae</uri>
</mesh>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<visual name='visual'>
<geometry>
<mesh>
<uri>model://dumpster/meshes/dumpster.dae</uri>
</mesh>
</geometry>
<material>
<script>
<uri>model://dumpster/materials/scripts</uri>
<uri>model://dumpster/materials/textures</uri>
<name>Dumpster/Diffuse</name>
</script>
</material>
</visual>
<velocity_decay>
<linear>0</linear>
<angular>0</angular>
</velocity_decay>
<self_collide>0</self_collide>
<inertial>
<inertia>
<ixx>1</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>1</iyy>
<iyz>0</iyz>
<izz>1</izz>
</inertia>
<mass>1</mass>
</inertial>
<kinematic>0</kinematic>
<gravity>1</gravity>
</link>
<pose>1 -3.44458 0 0 -0 -0.3</pose>
<static>0</static>
</model>
<model name='cube_20k'>
<link name='link'>
<pose>0 0 0.5 0 -0 0</pose>
<collision name='collision'>
<geometry>
<mesh>
<uri>model://cube_20k/meshes/cube_20k.stl</uri>
<scale>0.5 0.5 0.5</scale>
</mesh>
</geometry>
<max_contacts>10</max_contacts>
<surface>
<bounce/>
<friction>
<ode/>
</friction>
<contact>
<ode/>
</contact>
</surface>
</collision>
<visual name='visual'>
<geometry>
<mesh>
<uri>model://cube_20k/meshes/cube_20k.stl</uri>
<scale>0.5 0.5 0.5</scale>
</mesh>
</geometry>
</visual>
<velocity_decay>
<linear>0</linear>
<angular>0</angular>
</velocity_decay>
<self_collide>0</self_collide>
<inertial>
<inertia>
<ixx>1</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>1</iyy>
<iyz>0</iyz>
<izz>1</izz>
</inertia>
<mass>1</mass>
</inertial>
<kinematic>0</kinematic>
<gravity>1</gravity>
</link>
<pose>1.41131 -1 0 0 -0 0.9</pose>
<static>0</static>
</model>
</world>
</sdf>
3)车体urdf建模与控制程序
非常建议阅读该篇文章后再阅读下面内容
ROS ArbotiX控制+xacro机器人仿真模型设计 实现初级建模与车体控制
或下载
urdf描述包:https://gitee.com/alen2020/mbot_description.git
车体控制包:https://gitee.com/alen2020/mbot_teleop.git
4)launch文件
在加载机器人模型描述参数这里引入了功能包,若没有该功能包需要看上一节给出的链接文件,里面介绍到xacro文件的编写,或有自己的一套车体模型,则引入自己的,注意命名。
<launch>
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find mbot_gazebo)/worlds/playground.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_with_camera_gazebo.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
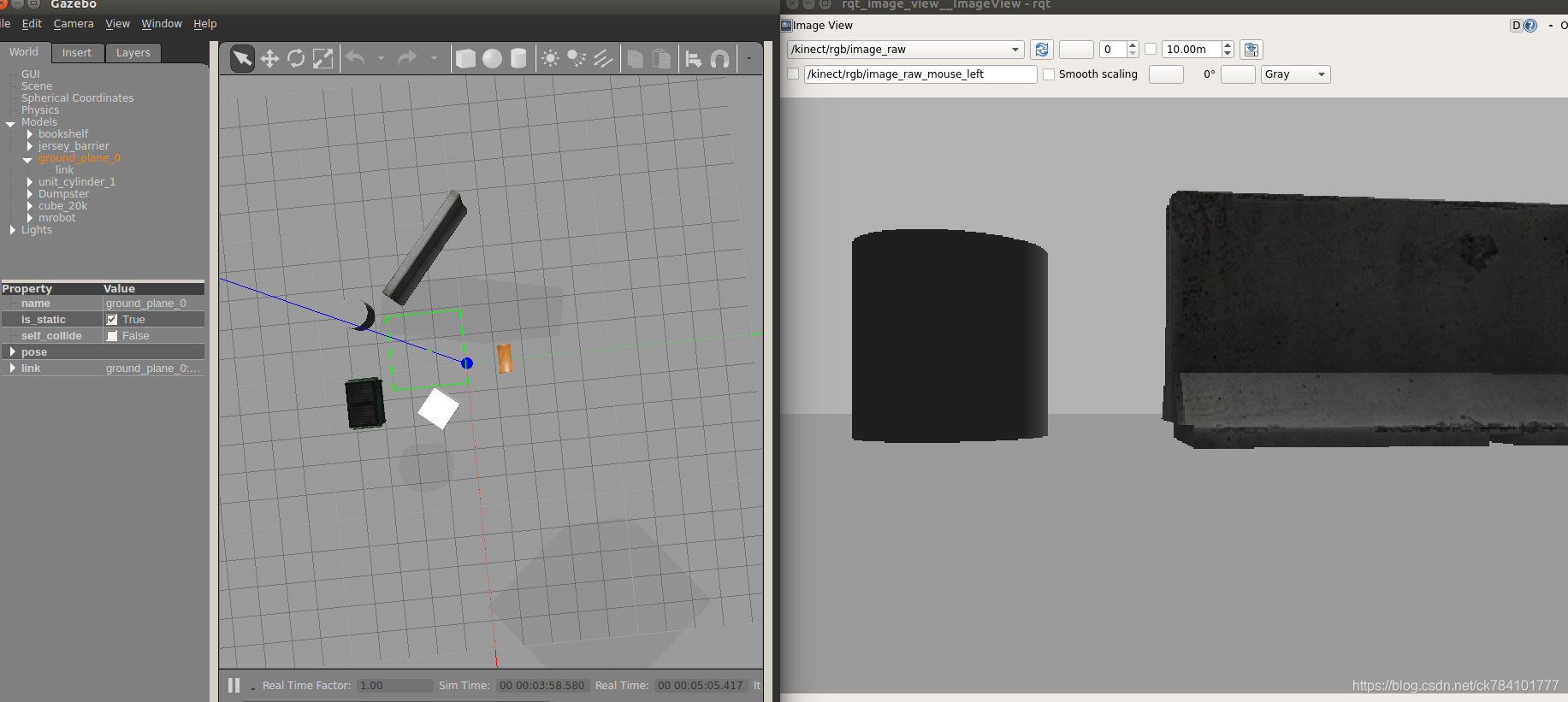
5)执行launch文件运行程序
开启三个终端,执行下三条指令
$ roslaunch test1 view_mbot_with_camera_gazebo.launch
$ roslaunch mbot_teleop mbot_teleop.launch
$ rqt_image_view在rqt_image_view中选择订阅/camera/image_raw话题,移动车体,即可看到实时视图
使用Gazepo 实现雷达仿真
1)Launch文件
使用雷达仿真修改launch文件即可,前提是有车体urdf建模这个包,我在上一节给出
与摄像头不同的是xacro的引入文件
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_with_laser_gazebo.xacro'" />
<launch>
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find mbot_gazebo)/worlds/playground.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_with_laser_gazebo.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>2) 执行
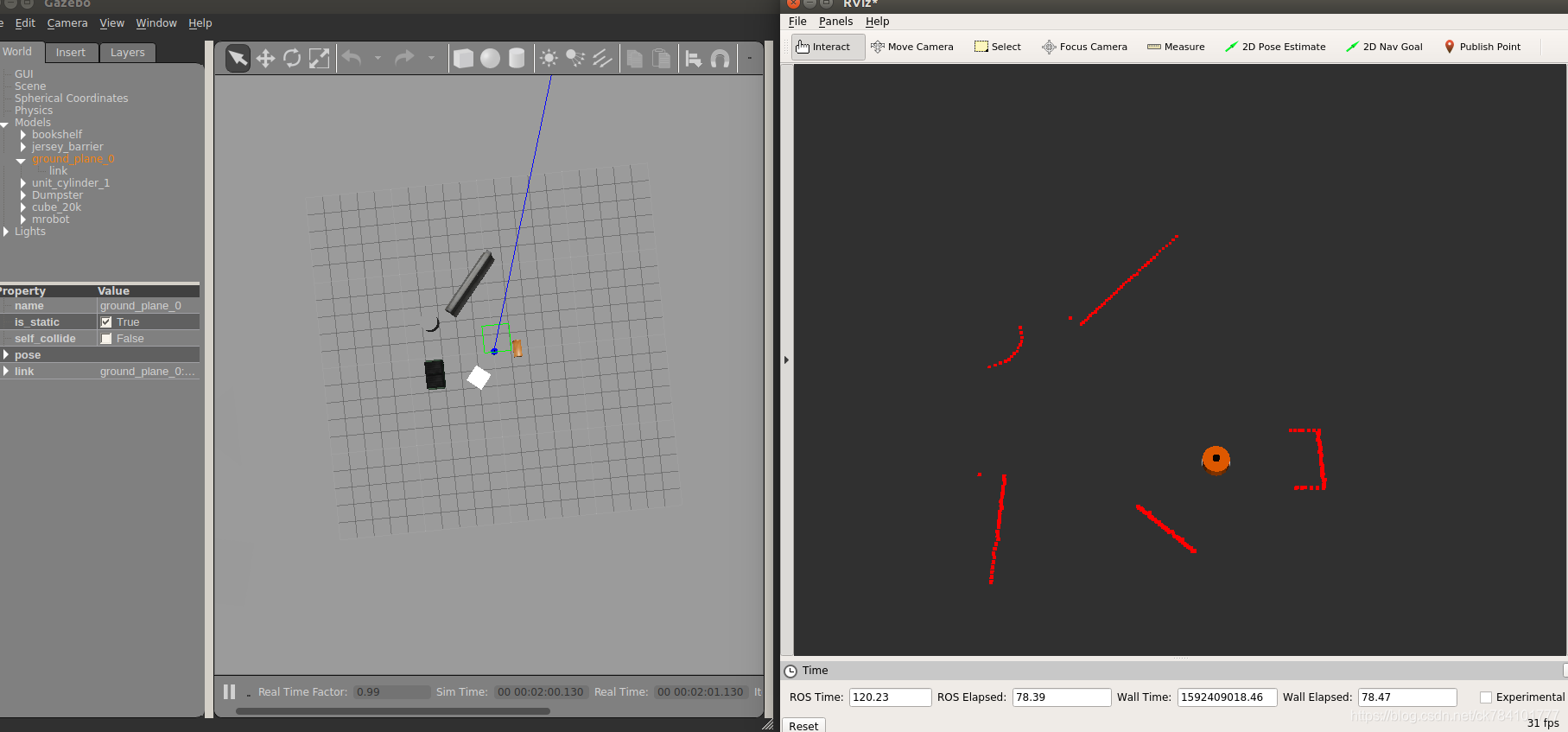
开启三个终端,执行下三条指令
$ roslaunch test1 view_mbot_with_laser_gazebo.launch
$ roslaunch mbot_teleop mbot_teleop.launch
$ rviz可以看到单线激光雷达的点云数据,控制车体移动,点云数据实时变动
使用Gazepo 实现Kinect仿真
1)launch文件
使用Kinect仿真修改launch文件即可,前提是有车体urdf建模这个包,我在第一节给出
与摄像头和激光雷达不同的是xacro的引入文件
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_with_kinect_gazebo.xacro'" />
<launch>
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find mbot_gazebo)/worlds/playground.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/gazebo/mbot_with_kinect_gazebo.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
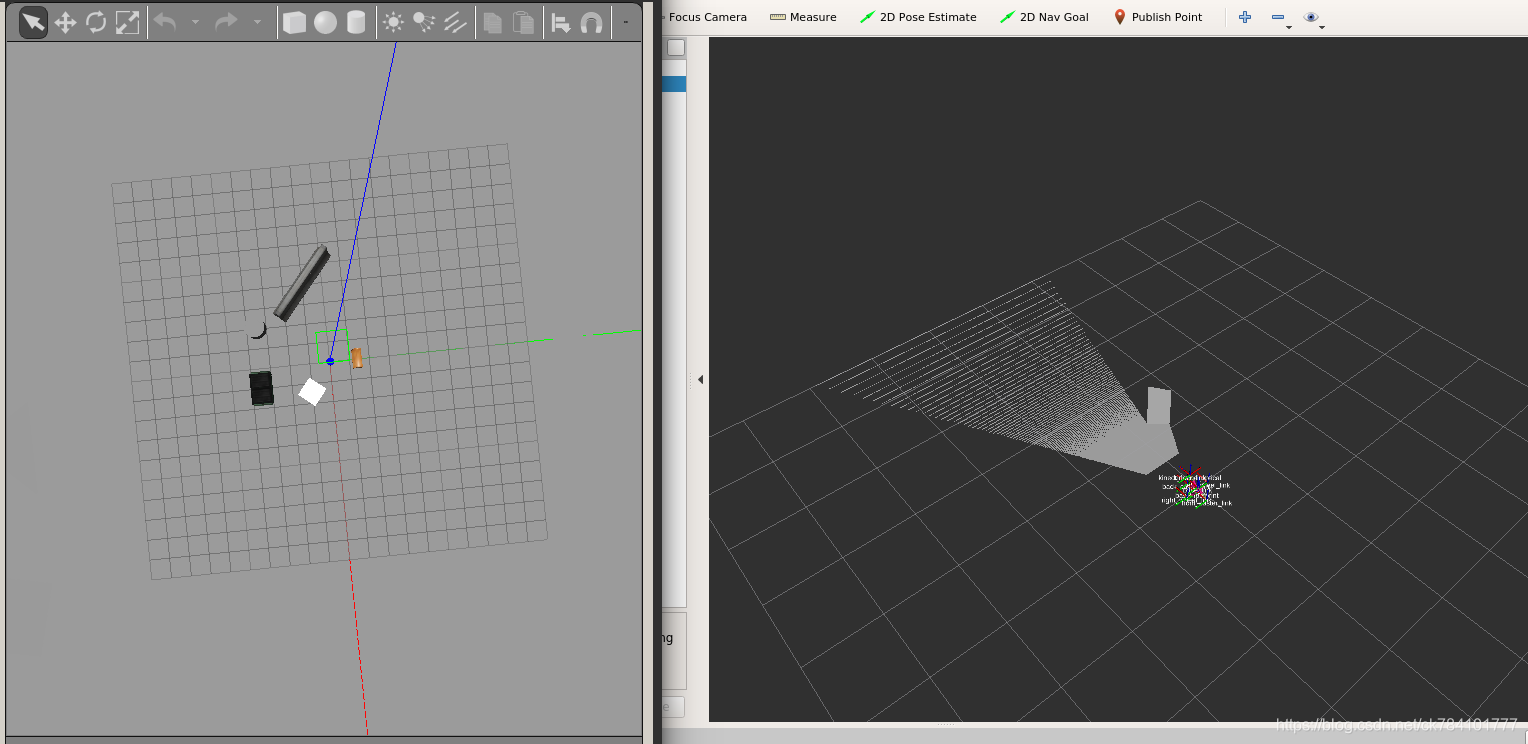
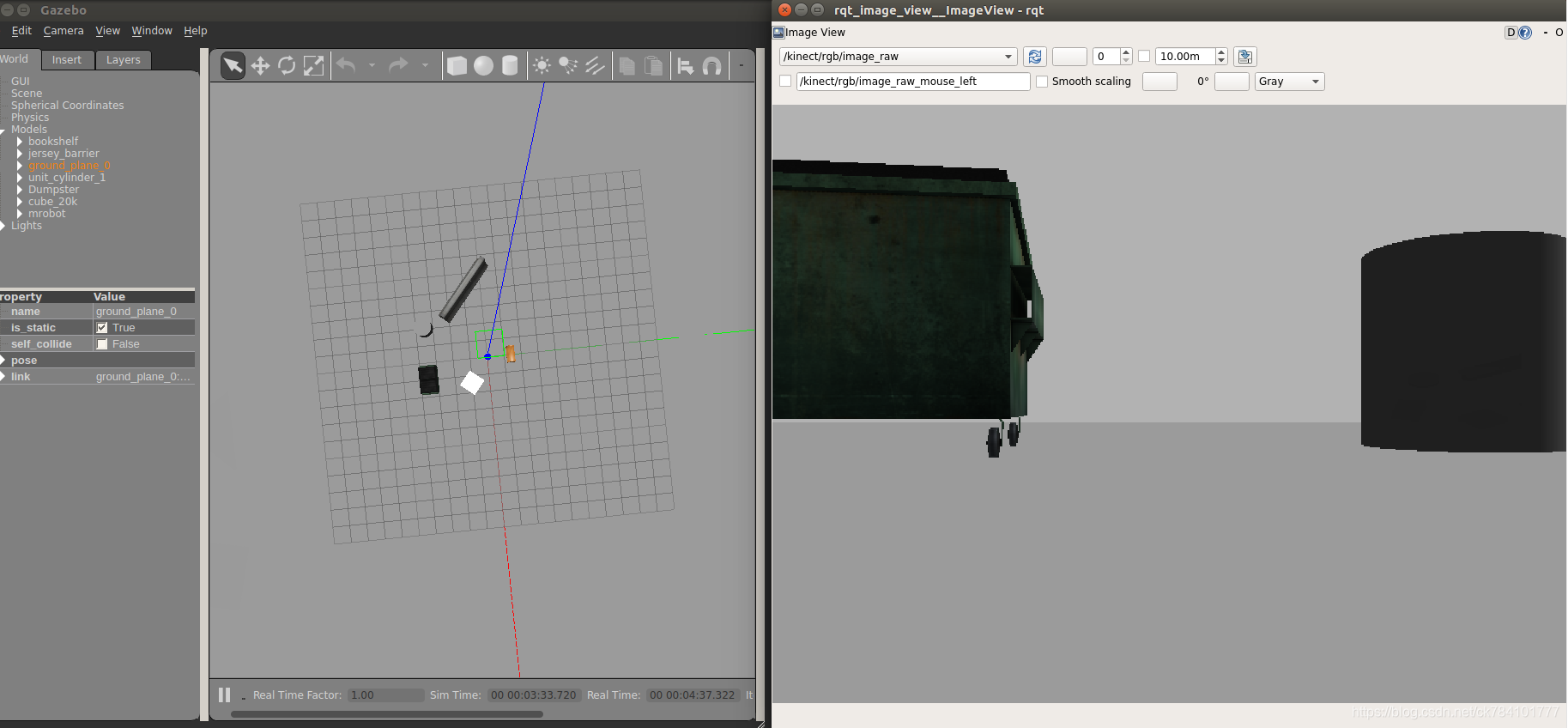
</launch>2)执行
$ roslaunch test1 view_mbot_with_laser_gazebo.launch
$ roslaunch mbot_teleop mbot_teleop.launch
$ rqt_image_view
$ rvizkinect既可以看到点云数据,也可以看到摄像头信息,相对于激光雷达来说,Kinect的点云扫射访问很窄(通常不超过180度)

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 6
6 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)