基于粒子群PSO算法的飞行器三维路径规划(无人机路径规划)
基于粒子群优化(PSO)算法的无人机三维路径规划问题,针对海陆空多栖环境的复杂性,构建了路径规划的优化模型,并通过改进PSO算法提高寻优精度与收敛速度。仿真结果表明,该方法在复杂环境中能够快速生成满足约束条件的最优路径,为无人机及空中机器人在实际任务中的路径规划提供了有效的解决方案。
基于粒子群优化(PSO)算法的无人机三维路径规划问题,针对海陆空多栖环境的复杂性,构建了路径规划的优化模型,并通过改进PSO算法提高寻优精度与收敛速度。仿真结果表明,该方法在复杂环境中能够快速生成满足约束条件的最优路径,为无人机及空中机器人在实际任务中的路径规划提供了有效的解决方案。
1. 三维路径规划问题建模
无人机路径规划可以看作在三维空间中寻找一条从起点到终点的最优路径,同时满足以下约束:
-
碰撞约束:路径不得穿越障碍物。
-
距离约束:路径长度应尽可能短。
-
平滑约束:路径应尽量平滑以满足飞行器的运动学约束。
2. 粒子群优化算法(PSO)
PSO是一种基于种群的优化算法,其核心思想是通过模拟粒子在搜索空间中的飞行,逐步逼近最优解。每个粒子通过以下公式更新位置和速度:

3. 改进PSO算法
为提高PSO算法在三维路径规划中的性能,本文采用以下改进措施:
-
动态调整惯性权重,使其随迭代次数递减。
-
引入路径平滑因子,通过惩罚函数约束路径的曲率。
1. 收敛性能
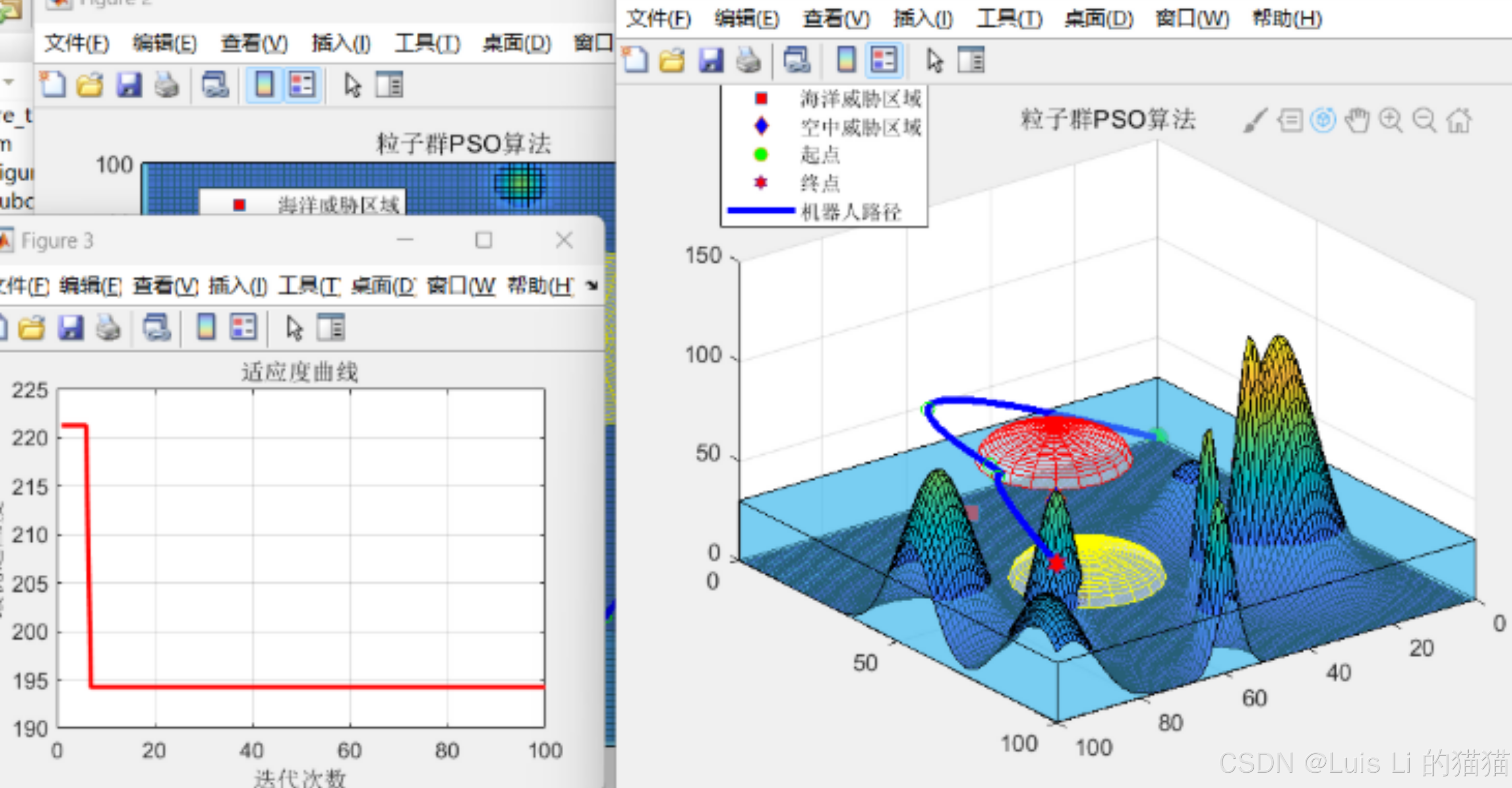
改进后的PSO算法相比传统PSO具有更快的收敛速度和更高的寻优精度。在100次迭代内,目标函数值达到最优值。
2. 路径规划效果
仿真结果显示,规划路径能够有效避开障碍物,路径总长度较短且平滑度较高,满足无人机实际飞行需求。
3. 对比分析
将改进PSO与遗传算法(GA)进行对比,发现PSO在收敛速度和结果质量方面均优于GA。
% 参数初始化
num_particles = 30; % 粒子数量
num_dimensions = 3; % 维度
max_iter = 100; % 最大迭代次数
w = 0.9; % 惯性权重
c1 = 2; c2 = 2; % 加速系数
bounds = [0, 100; 0, 100; 0, 100]; % 三维空间边界
obstacles = [30, 30, 30; 60, 60, 60]; % 障碍物位置
% 初始化粒子位置和速度
position = rand(num_particles, num_dimensions) .* (bounds(:,2) - bounds(:,1))' + bounds(:,1)';
velocity = zeros(num_particles, num_dimensions);
pbest = position; % 个体最优
gbest = position(1, :); % 全局最优
% 目标函数定义
objective_function = @(x) sum(sqrt(sum(diff([x; gbest]).^2, 2))); % 路径长度
% 主循环
for iter = 1:max_iter
fori = 1:num_particles
% 计算适应度
fitness = objective_function(position(i, :));
if fitness < objective_function(pbest(i, :))
pbest(i, :) = position(i, :);
end
if fitness < objective_function(gbest)
gbest = position(i, :);
end
end
% 更新速度和位置
fori = 1:num_particles
r1 = rand(); r2 = rand();
velocity(i, :) = w * velocity(i, :) ...
+ c1 * r1 * (pbest(i, :) - position(i, :)) ...
+ c2 * r2 * (gbest - position(i, :));
position(i, :) = position(i, :) + velocity(i, :);
% 边界处理
position(i, :) = max(position(i, :), bounds(:,1)');
position(i, :) = min(position(i, :), bounds(:,2)');
end
% 动态调整惯性权重
w = w - 0.005;
end
% 绘制结果
figure;
scatter3(position(:,1), position(:,2), position(:,3), 'filled');
hold on;
scatter3(obstacles(:,1), obstacles(:,2), obstacles(:,3), 'r', 'filled');
plot3([0, gbest(1)], [0, gbest(2)], [0, gbest(3)], 'b-', 'LineWidth', 2);
title('粒子群路径规划');
xlabel('X'); ylabel('Y'); zlabel('Z');
grid on;
有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)