ros 坐标系
·
1 . 坐标系统:
当你工作于参考坐标系空间,记住:ROS使用 右手定义 :
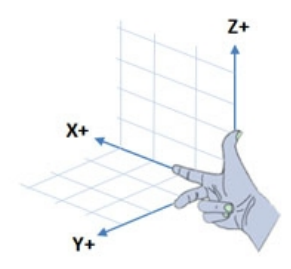
所以,对于 ROS 机器人,如果以它为坐标系的原心,那么:
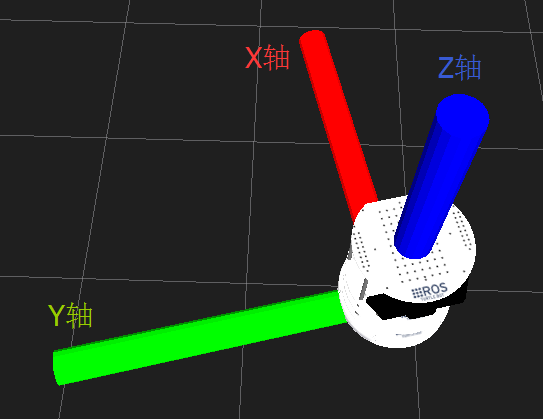
- x轴:前方
- y轴:左方
- z轴:上方
2 . 在一个绕轴线上的旋转,也使用 右手定义:
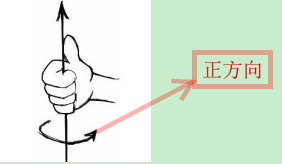
根据右手定义,围绕 z轴正旋转 是 逆时针旋转
3 . 测量单位:
ROS使用公制 :
- 线速度:
m/s - 角速度:
rad/s
线速度=0.5m/s 对于一个室内机器人来说是一个相当快的速度了。角速度=1.0rad/s 就是旋转一圈6秒钟。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 2
2 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)