多旋翼无人机建模-牛顿欧拉法
多旋翼无人机建模建模之前我们先分析一下多旋翼无人机有哪些状态量:用于表示线运动的三轴位置、速度和加速度;用于表示角运动的三轴姿态角和姿态角速度;这一共是15个状态量。首先来看线运动方程的建立过程:我们取地理坐标系为北东地(NED),机体系为前右下:由牛顿第二定律有:F=maF=m aF=ma即F=m[axayaz]F=m \left[ \begin{array}{l}{a_{x}} \...
多旋翼无人机建模
建模之前我们先分析一下多旋翼无人机有哪些状态量:用于表示线运动的三轴位置、速度和加速度;用于表示角运动的三轴姿态角和姿态角速度;这一共是15个状态量。
首先来看线运动方程的建立过程:我们取地理坐标系为北东地(NED),机体系为前右下:
由牛顿第二定律有:
F=maF=m aF=ma
即
F=m[axayaz]F=m \left[ \begin{array}{l}{a_{x}} \\ {a_{y}} \\ {a_{z}}\end{array}\right]F=m⎣⎡axayaz⎦⎤
注意此处的FFF和加速度aaa均是在地理系下的表示(FFF表示四个旋翼产生的总升力),进一步将上式展开可得
[00mg]−Rbe[00f1+f2+f3+f4]=m[axayaz]\left[ \begin{array}{c}{0} \\ {0} \\ {m g}\end{array}\right] - \boldsymbol{R}_{b}^{e} \left[ \begin{array}{c}{0} \\ {0} \\ {f_{1}+f_{2}+f_{3}+f_{4}}\end{array}\right]=m \left[ \begin{array}{l}{a_{x}} \\ {a_{y}} \\ {a_{z}}\end{array}\right]⎣⎡00mg⎦⎤−Rbe⎣⎡00f1+f2+f3+f4⎦⎤=m⎣⎡axayaz⎦⎤
其中Rbe\boldsymbol{R}_{b}^{e}Rbe表示由机体坐标系到地理坐标系的转换矩阵,由于fi,i=1…4f_i,i=1…4fi,i=1…4分别表示四个旋翼沿机体ZZZ轴负方向产生的升力,故需要将其转换到地理系中;
Rbe=[cθcψsϕsθcψ−cϕsψcϕsθcψ+sϕsψcθsψsϕsθsψ+cϕcψcϕsθsψ−sϕcψ−sθsϕcθcϕcθ]\boldsymbol{R}_{b}^{e}=\left[ \begin{array}{ccc}{c \theta c \psi} & {s \phi s \theta c \psi-c \phi s \psi} & {c \phi s \theta c \psi+s \phi s \psi} \\ {c \theta s \psi} & {s \phi s \theta s \psi+c \phi c \psi} & {c \phi s \theta s \psi-s \phi c \psi} \\ {-s \theta} & {s \phi c \theta} & {c \phi c \theta}\end{array}\right]Rbe=⎣⎡cθcψcθsψ−sθsϕsθcψ−cϕsψsϕsθsψ+cϕcψsϕcθcϕsθcψ+sϕsψcϕsθsψ−sϕcψcϕcθ⎦⎤
联立上式进一步化简即可得到线运动的模型表示:
{x¨=(cϕsθcψ+sϕsψ)−Fmy¨=(cϕsθsψ−sϕcψ)−Fmz¨=g−(cϕcθ)Fm\left\{\begin{array}{c}{\ddot{x}=(\mathrm{c} \phi \mathrm{s} \theta \mathrm{c} \psi+\mathrm{s} \phi \mathrm{s} \psi) \frac{-F}{m}} \\ {\ddot{y}=(\mathrm{c} \phi \mathrm{s} \theta \mathrm{s} \psi-\mathrm{s} \phi \mathrm{c} \psi) \frac{-F}{m}} \\ {\ddot{z}=g-(\mathrm{c} \phi \mathrm{c} \theta) \frac{F}{m}}\end{array}\right.⎩⎨⎧x¨=(cϕsθcψ+sϕsψ)m−Fy¨=(cϕsθsψ−sϕcψ)m−Fz¨=g−(cϕcθ)mF
线运动的建模过程很简单,但是多旋翼不光能移动还能旋转,这个旋转过程就需要刚体的旋转相关知识。
物体如何旋转跟旋翼产生的力矩有关,力矩与力F和距离l有如下公式:M=F∗lM=F * lM=F∗l
而这里的力矩又与多旋翼动力布局有关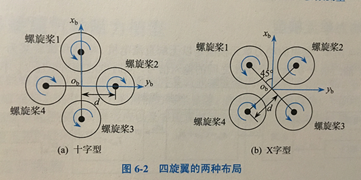
如果是十字型的布局:
F=∑i=14Ti=cT(w12+w22+w32+w42)F=\sum_{i=1}^{4} T_{i}=c_{\mathrm{T}}\left(w_{1}^{2}+w_{2}^{2}+w_{3}^{2}+w_{4}^{2}\right)F=i=1∑4Ti=cT(w12+w22+w32+w42)
{τx=dcT(−w22+w42)τy=dcT(w12−w32)τz=cM(w12−w22+w32−w42)\left\{\begin{array}{l}{\tau_{x}=d c_{\mathrm{T}}\left(-w_{2}^{2}+w_{4}^{2}\right)} \\ {\tau_{y}=d c_{\mathrm{T}}\left(w_{1}^{2}-w_{3}^{2}\right)} \\ {\tau_{z}=c_{\mathrm{M}}\left(w_{1}^{2}-w_{2}^{2}+w_{3}^{2}-w_{4}^{2}\right)}\end{array}\right.⎩⎨⎧τx=dcT(−w22+w42)τy=dcT(w12−w32)τz=cM(w12−w22+w32−w42)
写成矩阵形式如下:
[Fτxτyτz]=[cTcTcTcT0−dcT0dcTdcT0−dcT0cM−cMcM−cM][w12w22w32w42]\left[ \begin{array}{l}{F} \\ {\tau_{x}} \\ {\tau_{y}} \\ {\tau_{z}}\end{array}\right]=\left[ \begin{array}{cccc}{c_{\mathrm{T}}} & {c_{\mathrm{T}}} & {c_{\mathrm{T}}} & {c_{\mathrm{T}}} \\ {0} & {-d c_{\mathrm{T}}} & {0} & {d c_{\mathrm{T}}} \\ {d c_{\mathrm{T}}} & {0} & {-d c_{\mathrm{T}}} & {0} \\ {c_{\mathrm{M}}} & {-c_{\mathrm{M}}} & {c_{\mathrm{M}}} & {-c_{\mathrm{M}}}\end{array}\right] \left[ \begin{array}{c}{w_{1}^{2}} \\ {w_{2}^{2}} \\ {w_{3}^{2}} \\ {w_{4}^{2}}\end{array}\right] ⎣⎢⎢⎡Fτxτyτz⎦⎥⎥⎤=⎣⎢⎢⎡cT0dcTcMcT−dcT0−cMcT0−dcTcMcTdcT0−cM⎦⎥⎥⎤⎣⎢⎢⎡w12w22w32w42⎦⎥⎥⎤
对X型动力布局:
F=∑i=14Ti=cT(w12+ϖ22+ϖ32+ϖ42)F=\sum_{i=1}^{4} T_{i}=c_{\mathrm{T}}\left(w_{1}^{2}+\varpi_{2}^{2}+\varpi_{3}^{2}+\varpi_{4}^{2}\right)F=i=1∑4Ti=cT(w12+ϖ22+ϖ32+ϖ42)
{τx=dcT(2ω12/2−2ω22/2−2ω32/2+2ω42/2)τy=dcT(2ω12/2+2ω22/2−2ω32/2−2ω42/2)τz=cM(ω12−ω22+ω32−ω42)\left\{\begin{array}{c}{\tau_{x}=d c_{\mathrm{T}}\left(\sqrt{2} \omega_{1}^{2} / 2-\sqrt{2} \omega_{2}^{2} / 2-\sqrt{2} \omega_{3}^{2} / 2+\sqrt{2} \omega_{4}^{2} / 2\right)} \\ {\tau _{y}=d c_{\mathrm{T}}\left(\sqrt{2} \omega_{1}^{2} / 2+\sqrt{2} \omega_{2}^{2} / 2-\sqrt{2} \omega_{3}^{2} / 2-\sqrt{2} \omega_{4}^{2} / 2\right)} \\ {\tau _{z}=c_{\mathrm{M}}\left(\omega_{1}^{2}-\omega_{2}^{2}+\omega_{3}^{2}-\omega_{4}^{2}\right)}\end{array}\right.⎩⎨⎧τx=dcT(2ω12/2−2ω22/2−2ω32/2+2ω42/2)τy=dcT(2ω12/2+2ω22/2−2ω32/2−2ω42/2)τz=cM(ω12−ω22+ω32−ω42)
上式中FFF为四个旋翼产生的总升力,τx,τy,τz\tau _x ,\tau _y ,\tau _zτx,τy,τz分别表示旋翼产生的作用在三个姿态通道的控制力矩。
根据欧拉方程M=Jε+ω×JωM=J \varepsilon+\omega \times J \omega M=Jε+ω×Jω
其中ε\varepsilonε表示角加速度,ω\omegaω表示角速度,MMM表示姿态通道控制力矩;
欧拉角速度
Θ˙=[ϕ˙θ˙ψ˙]\dot{\boldsymbol{\Theta}}=\left[ \begin{array}{c}{\dot{\phi}} \\ {\dot{\theta}} \\ {\dot{\psi}}\end{array}\right]Θ˙=⎣⎡ϕ˙θ˙ψ˙⎦⎤
与机体角速度
Ω=[wxwywz]{\boldsymbol{\Omega}}=\left[ \begin{array}{c}{w_x} \\ {w_y} \\ {w_z}\end{array}\right]Ω=⎣⎡wxwywz⎦⎤
之间的关系为
Θ˙=WΩ \dot{\boldsymbol{\Theta}}=\boldsymbol{W} \boldsymbol{\Omega} Θ˙=WΩ
W=[1tanθsinϕtanθcosϕ0cosϕ−sinϕ0sinϕ/cosθcosϕ/cosθ] W=\left[ \begin{array}{ccc}{1} & {\tan \theta \sin \phi} & {\tan \theta \cos \phi} \\ {0} & {\cos \phi} & {-\sin \phi} \\ {0} & {\sin \phi / \cos \theta} & {\cos \phi / \cos \theta}\end{array}\right] W=⎣⎡100tanθsinϕcosϕsinϕ/cosθtanθcosϕ−sinϕcosϕ/cosθ⎦⎤假设多旋翼无人机姿态角在小角度内变化,则可认为W=IW=IW=I,即Θ˙=Ω\dot{\boldsymbol{\Theta}}= \boldsymbol{\Omega}Θ˙=Ω
角加速度为[ϕ¨θ¨ψ¨]\left[ \begin{array}{c}{\ddot{\phi}} \\ {\ddot{\theta}} \\ {\ddot{\psi}}\end{array}\right]⎣⎡ϕ¨θ¨ψ¨⎦⎤
转动惯量矩阵为
J=[Jxx−Jxy−Jxz−JyxJyy−Jyz−Jzx−JzyJzz]\mathbf{J}=\left[ \begin{array}{ccc}{J_{x x}} & {-J_{x y}} & {-J_{x z}} \\ {-J_{y x}} & {J_{y y}} & {-J_{y z}} \\ {-J_{z x}} & {-J_{z y}} & {J_{z z}}\end{array}\right]J=⎣⎡Jxx−Jyx−Jzx−JxyJyy−Jzy−Jxz−JyzJzz⎦⎤
其中Jxy=Jyx,Jxz=Jzx,Jyz=JzyJ_{xy}=J_{yx},J_{xz}=J_{zx},J_{y z}=J_{z y}Jxy=Jyx,Jxz=Jzx,Jyz=Jzy,对于标准多旋翼这样的中心对成物体,有Jxy=Jxz=Jyz=0J_{xy}=J_{xz}=J_{y z}=0Jxy=Jxz=Jyz=0,则有
[Jxx000Jyy000Jzz]\left[ \begin{array}{lll}{J_{x x}} & {0} & {0} \\ {0} & {J_{y y}} & {0} \\ {0} & {0} & {J_{z z}}\end{array}\right]⎣⎡Jxx000Jyy000Jzz⎦⎤
整理可得
{ϕ¨=θ˙ψ˙Jy−JzJx+τxJxθ¨=ϕ˙ψ˙Jz−JxJy+τyJyψ¨=ϕ˙θ˙Jx−JyJz+τzJz\left\{\begin{array}{l}{\ddot{\phi}=\dot{\theta} \dot{\psi} \frac{J_{y}-J_{z}}{J_{x}}+\frac{\tau_{x}}{J_{x}}} \\ {\ddot{\theta}=\dot{\phi} \dot{\psi} \frac{J_{z}-J_{x}}{J_{y}}+\frac{\tau_{y}}{J_{y}}} \\ {\ddot{\psi}=\dot{\phi} \dot{\theta} \frac{J_{x}-J_{y}}{J_{z}}+\frac{\tau_{z}}{J_{z}}}\end{array}\right.⎩⎪⎨⎪⎧ϕ¨=θ˙ψ˙JxJy−Jz+Jxτxθ¨=ϕ˙ψ˙JyJz−Jx+Jyτyψ¨=ϕ˙θ˙JzJx−Jy+Jzτz
至此,多旋翼的模型建立完毕。可以看到建模的其实就是为了得到输入的力与加速度的关系,通过牛顿方程可以得到线运动的加速度,通过欧拉方程可以得到角加速度,所以这种建模方法也叫牛顿-欧拉方程。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 14
14 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)