角速度与旋转矩阵的转换关系及思考
在机器人的控制和轨迹规划等领域,算法结果常常能够得到机器人执行器的速度,如移动机器人的角速度和线速度。在有些仿真情况下,或是其它需要实时更新机器人的运动状态时,我们常常需要根据这些计算出的速度参数(控制率)对机器人的位姿姿态进行更新。这就涉及到了角速度与旋转矩阵之间的对应转换关系。本文将简要给出一种它们之间的转换关系,并在后半部分着重介绍转换出的姿态矩阵在不
在机器人的控制和轨迹规划等领域,算法结果常常能够得到机器人执行器的速度,如移动机器人的角速度和线速度。在有些仿真情况下,或是其它需要实时更新机器人的运动状态时,我们常常需要根据这些计算出的速度参数(控制率)对机器人的位姿姿态进行更新。这就涉及到了角速度与旋转矩阵之间的对应转换关系。本文将简要给出一种它们之间的转换关系,并在后半部分着重介绍转换出的姿态矩阵在不同情况下的左乘、右乘的不同意义,这一问题也曾经让作者混淆了很久。
一. 控制率与位姿变换矩阵( 4×4 <script type="math/tex" id="MathJax-Element-1">4\times 4</script>)的转换
这里主要以Peter corke的视觉伺服工具箱中给出的转换方法为例,事实上,更为详尽的转换方式可以去了解一下指数映射关系,可以参见白老师的文章《 lie group and computer vision : 李群、李代数在计算机视觉中的应用》。
我们知道,一个变量的导数等于它本身再乘以一个系数。对于三维空间中的旋转矩阵来说,有如下表达式:
其中, S(ω) <script type="math/tex" id="MathJax-Element-3">S(\omega)</script>为关于角速度 ω <script type="math/tex" id="MathJax-Element-4">\omega</script>的反对称矩阵:
考虑在 R(t) <script type="math/tex" id="MathJax-Element-6">R(t)</script>处进行微分:
经过整理后可得:
因此,矩阵 △R=ζtS(ω)+I3×3 <script type="math/tex" id="MathJax-Element-9">\triangle R=\zeta_t S(\omega)+I_{3\times3}</script>即为角速度 ω <script type="math/tex" id="MathJax-Element-10">\omega</script>对应的旋转矩阵。
对于线速度 v <script type="math/tex" id="MathJax-Element-11">v</script>来说,在一定时间
当需要把位姿变换矩阵 △T <script type="math/tex" id="MathJax-Element-17">\triangle T</script>转换为速度参数 v <script type="math/tex" id="MathJax-Element-18">v</script>和
二. 那么问题来了:
1. 问题描述
上述控制率与位姿变换矩阵的转换关系在视觉伺服工具箱中对应于 delta2tr( v <script type="math/tex" id="MathJax-Element-20">v</script>)和tr2delta(


这个示例我们记为例1。从上面我们可以看出,经过转换出的位姿变换矩阵 △T=delta2tr(d) <script type="math/tex" id="MathJax-Element-23">\triangle T=delta2tr(d)</script>最终被 T0 <script type="math/tex" id="MathJax-Element-24">T_0</script> 左乘能够得到 T1 <script type="math/tex" id="MathJax-Element-25">T_1</script>的值。 但是在具体的例程代码中,如下面工具箱中的视觉伺服仿真的代码:
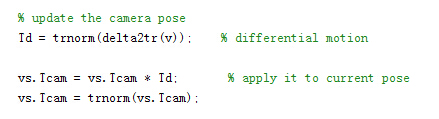
我们看到,位姿变换矩阵 △T=delta2tr(d) <script type="math/tex" id="MathJax-Element-26">\triangle T=delta2tr(d)</script>是被摄像机位姿 Tcam <script type="math/tex" id="MathJax-Element-27">T_{cam}</script> 右乘来实现位姿更新的。
除了这个视觉伺服工具箱外,在VISP开源库中,摄像机的姿态也是通过 右乘来实现的:
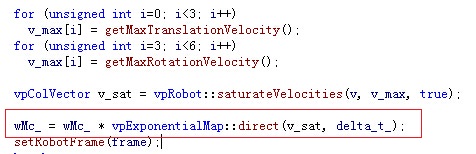
函数 direct(v_sat,delta_t)为利用指数映射将速度参数 v_sat <script type="math/tex" id="MathJax-Element-28">v\_sat</script>转换为位姿变换矩阵 △T <script type="math/tex" id="MathJax-Element-29">\triangle T</script>。
这两个例子我们记为例2。那么为什么有些情况下是左乘,有些情况下是右乘,这两者之间又有什么区分呢?
2. 左乘与右乘的不同情况及意义
首先来说例1中的左乘。对于左乘的情况,需要弄清楚的一点是,例1中 T0 <script type="math/tex" id="MathJax-Element-1411">T_0</script>、 T1 <script type="math/tex" id="MathJax-Element-1412">T_1</script>表示的是目标姿态在相同的参考坐标系(默认为世界坐标系)下的表示,因此,在这个例子中 tr2delta(d)求出的速度参数 v <script type="math/tex" id="MathJax-Element-1413">v</script>也是表示在这个坐标系下的。
所以,速度参数
位姿 T0 <script type="math/tex" id="MathJax-Element-1419">T_0</script>和位姿 T1 <script type="math/tex" id="MathJax-Element-1420">T_1</script>都是在世界坐标系下表示的,在 T0 <script type="math/tex" id="MathJax-Element-1421">T_0</script>位姿时,使其以速度 v <script type="math/tex" id="MathJax-Element-1422">v</script>进行运动,其对应的姿态转换矩阵为
因此,通过连杆矩阵相乘,可以得到:
其次再说右乘。例2中算法所求出的摄像机运动速度 v <script type="math/tex" id="MathJax-Element-1433">v</script>均是相对于当时摄像机自身坐标系来说的。因此,根据连杆矩阵变换,可以得到:
此外,右乘这种情况也可以这样理解:
摄像机的运行速度对应的位姿转换矩阵 △T <script type="math/tex" id="MathJax-Element-1435">\triangle T</script>可以理解成目标新的位姿 T1 <script type="math/tex" id="MathJax-Element-1436">T_1</script>在当前位姿 T0 <script type="math/tex" id="MathJax-Element-1437">T_0</script>所在的坐标系下的表示。比如,假定目标当前处于原点(0,0,0)的位置(自身坐标系),线速度为(5,0,0),那么当一定时间过去后,目标(新的位姿)是不是位于(5,0,0)处(原自身坐标系)?
所以,同样的对于速度参数转换得到的位姿变换矩阵,要注意分清楚这个速度参数v是在哪个坐标系下表示的,才能决定我们是左乘/右乘这个矩阵。
对于例1 中,如果要求取相对于 T0 <script type="math/tex" id="MathJax-Element-1438">T_0</script>位姿自身坐标系 Ccam <script type="math/tex" id="MathJax-Element-1439">C_{cam}</script>的速度 v1 <script type="math/tex" id="MathJax-Element-1440">v1</script>,那么该如何求?
1. 计算 T1 <script type="math/tex" id="MathJax-Element-1441">T_1</script>在 T0 <script type="math/tex" id="MathJax-Element-1442">T_0</script>自身坐标系 Ccam <script type="math/tex" id="MathJax-Element-1443">C_{cam}</script>下的表示 T∗1 <script type="math/tex" id="MathJax-Element-1444">T_1^*</script>;
2. 计算 T∗1 <script type="math/tex" id="MathJax-Element-1445">T_1^*</script>与单位矩阵 I4×4 <script type="math/tex" id="MathJax-Element-1446">I_{4\times4}</script>( T0 <script type="math/tex" id="MathJax-Element-1447">T_0</script>在自身坐标系下的位姿是单位阵 I4×4 <script type="math/tex" id="MathJax-Element-1448">I_{4\times4}</script>)的所对应的 v <script type="math/tex" id="MathJax-Element-1449"></script>。
利用视觉伺服工具箱简单验证一下:
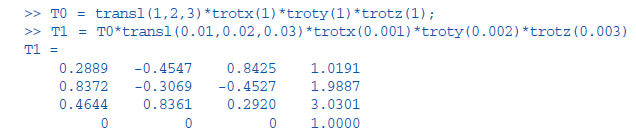
>> T0 = transl(1,2,3)*trotx(1)*troty(1)*trotz(1);
>> T1 = T0*transl(0.01,0.02,0.03)*trotx(0.001)*troty(0.002)*trotz(0.003)
T1 =
0.2889 -0.4547 0.8425 1.0191
0.8372 -0.3069 -0.4527 1.9887
0.4644 0.8361 0.2920 3.0301
0 0 0 1.0000
>> T1_in_0=inv(T0)*T1;
>> I=eye(4);
>> v=tr2delta(I,T1_in_0);
>> v'
ans =
0.0100 0.0200 0.0300 0.0010 0.0020 0.0030三. Tips:
- 对于位姿变换矩阵左乘和右乘,不同的人有不同的理解。比如有些情况下,目标从位姿运动到位姿时,可以把速度首先取负号,表达从状态运动到状态的控制率,这种情况下右乘的 还需要先对其求逆才能相乘。
- 理解来源于研一机器人学课件中“右乘联体左乘基”这句话,所以说学过的基础知识一定要学扎实,不然之后就有可能被一些不起眼的细节知识绊住☺。
个人理解,如有错误请指出

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)