自抗扰控制器-2.非线性状态误差反馈控制律 NLSEF
非线性校正线性反馈:增益反比的方式抑制扰动;非线性反馈:数量级的方式抑制扰动。设误差方程为其中,e 为输入误差;a 反映了增益的变化率,当a >=1,误差又较大时,该函 数增益可能过大,而导致系统不稳定,通常0 < a < 1,a 越大,增益随误差增大而增大的速率越快;d 是为避免函数在原点振荡而引入的一个很小的正数,可以决定函数增益线性变化的区间的大小。该函数为无量纲函数,以a
·
非线性校正
线性反馈:增益反比的方式抑制扰动;
非线性反馈:数量级的方式抑制扰动。
设误差方程为
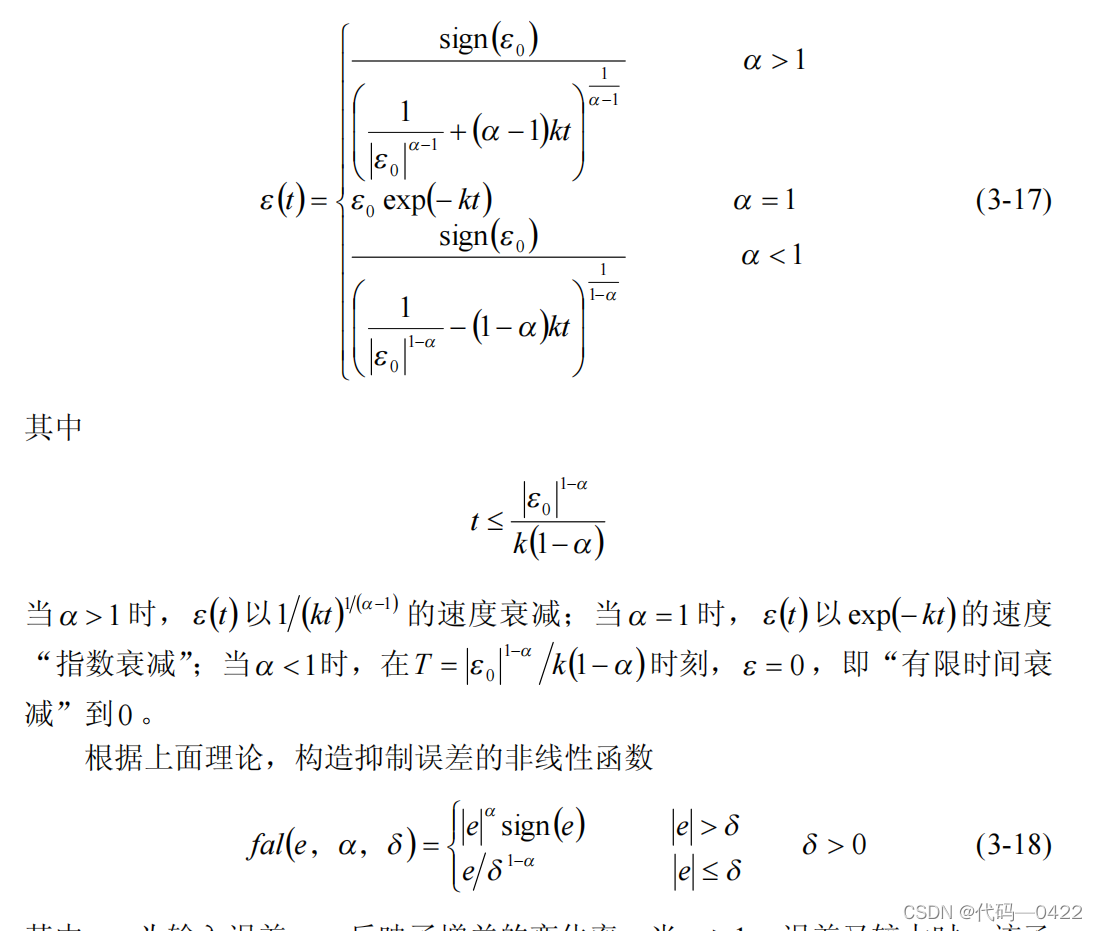
其中,e 为输入误差;a 反映了增益的变化率,当a >=1,误差又较大时,该函 数增益可能过大,而导致系统不稳定,通常0 < a < 1,a 越大,增益随误差增
大而增大的速率越快;d 是为避免函数在原点振荡而引入的一个很小的正数,
可以决定函数增益线性变化的区间的大小。该函数为无量纲函数,以
a = 0.25,d = 0.1为例作 fal 函数曲线如图 3-2 所示。由图可以看出, fal函数 反映了一个工程经验:小误差,大增益;大误差,小增益的特性。即:要减小
误差,增益要取较大的值;增益较小时,误差一般也较大。 fal 函数是一个随
输入误差自动调节增益的环节,且误差较大时曲线的斜率较小,一般不会导致
增益过大引起的系统不稳定。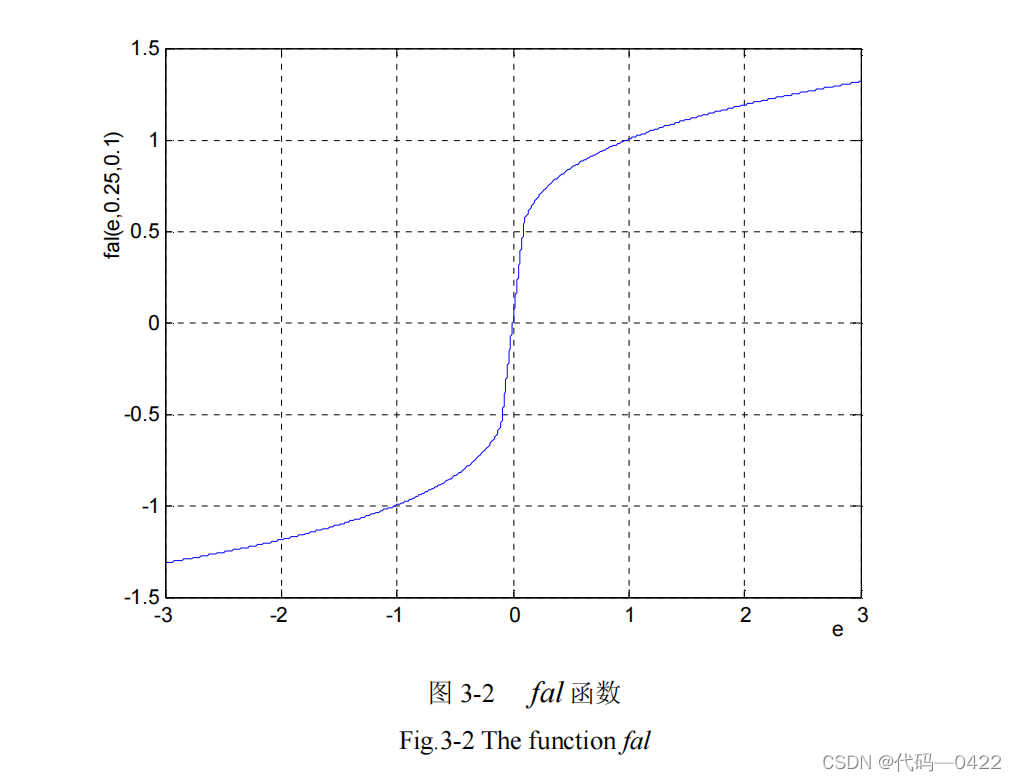

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 5
5 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)