第三届onsite第四赛道端到端环境配置
配置onsite环境
(马上要截止了啊,我还没配环境啊,还没模型啊,要命了啊)
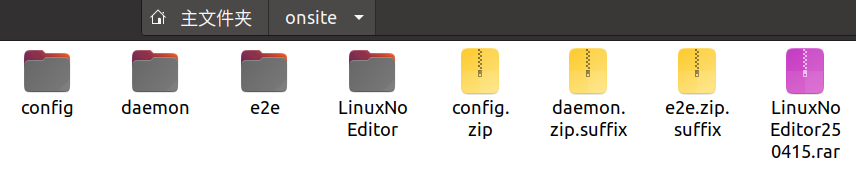
进入平台无人车测试场平台,进下载中心,把所有文件都下下来,解压
(这个LinuxNoEditor250415.rar去终端用unrar 解压,不要直接右键提取)
来,把下载的“使用手册端到端版本-OnSite.pdf” 翻到第一页~
一、准备自动驾驶算法
这部分流程都写在了/e2e/README_CN.md中
创建cuda环境
conda create -n onsite python=3.10 -y安装网络库
进入/e2e路径下,输入命令:
pip install dists/libMulticastNetwork-1.0.0-cp310-cp310-linux_x86_64.whl如果装不上就用镜像
pip install dists/libMulticastNetwork-1.0.0-cp310-cp310-linux_x86_64.whl -i https://pypi.tuna.tsinghua.edu.cn/simple/安装torch,torchvision,cuda
/e2e的README中写的是python3.10+torch1.10.1+CUDA11.1,但是torch1.10.1只支持到python3.9,没懂
我改成了pyhton3.10+torch1.11+cuda11.3先试试
conda install cudatoolkit=11.3 -c conda-forge
pip install torch==1.11+cu113 torchvision==0.12.0+cu113 -f https://download.pytorch.org/whl/torch_stable.html安装mmdetection
pip install -U openmim
mim install mmengine
mim install 'mmcv>=2.0.0rc4'
mim install 'mmdet>=3.0.0'
mim install "mmdet3d>=1.1.0"结果装不上,用镜像装算了,希望不要出问题:
pip install openmim -i https://pypi.tuna.tsinghua.edu.cn/simple
mim install mmengine -i https://pypi.tuna.tsinghua.edu.cn/simple
mim install 'mmcv>=2.0.0rc4' -i https://pypi.tuna.tsinghua.edu.cn/simple
mim install 'mmdet>=3.0.0' -i https://pypi.tuna.tsinghua.edu.cn/simple
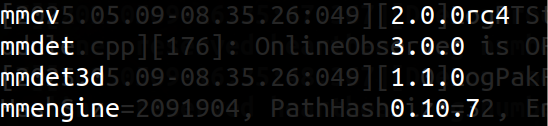
mim install "mmdet3d>=1.1.0" -i https://pypi.tuna.tsinghua.edu.cn/simple安装mmdet时报错,版本冲突。虽说成功安装了,但还是不能用。

我用的这个版本,没有冲突,能用:
下载demo模型的权重和配置文件
lidar的:
mim download mmdet3d --config pointpillars_hv_secfpn_8xb6-160e_kitti-3d-car --dest .
camera的:
mim download mmdet --config yolox_tiny_8x8_300e_coco --dest .第一个指令下载的两个文件扔到/e2e根目录下
第二个指令下载的两个文件pdf里面似乎没写?先不管了
忘了是哪一步自动安装的numpy了,安装的是numpy2.2.5,会和我安装的torch版本冲突,我重新手动安装了一下:
pip install "numpy<2" -i https://pypi.tuna.tsinghua.edu.cn/simple/
二.创建测试场地
这部分直接照着pdf里面走就行,没有坑
从这部分开始就可以照着下载的“第四赛道用户操作手册pdf”第七部走了,这个好像写的比使用手册那个pdf更详细
三.本地启动仿真器
1、启动daemon
打开刚才解压的config文件,修改里面的common.yaml,具体怎么改在pdf和下载的视频中都有讲。
要修改的参数:
local_ip:自己电脑的ip地址
net_interface_name:网口
field_id:测试场地的ID(一长串的那个)(但是我之前一直填的场地名好像也能用)

fieldNo:测试场地编号
account:登录用户名
password:登录密码
config_center_addr:,之前换过一次地址,config中写的可能不对,改成119.45.7.140:52009
url:70行左右的这个场地url,也改成http://119.45.7.140:52001/api/v0/fields/field
第22行开始是配置传感器参数,按照自己的需求改。
配置完后,cd到/daemon路径,运行 ./start.sh 启动
2、启动仿真
先跑个示例。
在/e2e/samples/run.py第185行这一段的参数需要修改

我直接将这些args.XXXX改成自己的参数了(和上面改common.yaml的参数一样),能用,记得加双引号
cd到/LinuxNoeditor路径,启动仿真:
bash start.sh 
打开仿真后daemon这边的终端也应该能输出信息了:

四.本地启动自动驾驶算法
cd到/e2e路径下,执行:
python samples/run.py
可能会提示缺几个包,装上就星。正常运行应该能看到信息:

等输出最后这一行“is model init:0”时,daemon那个终端也会输出两行信息:

此时就可以运行案例了
六、新建作业
你问我五在哪?我也不到啊,我照着使用手册写的
新建作业的流程直接照着使用手册走即可。
七.在本地观察和调试算法
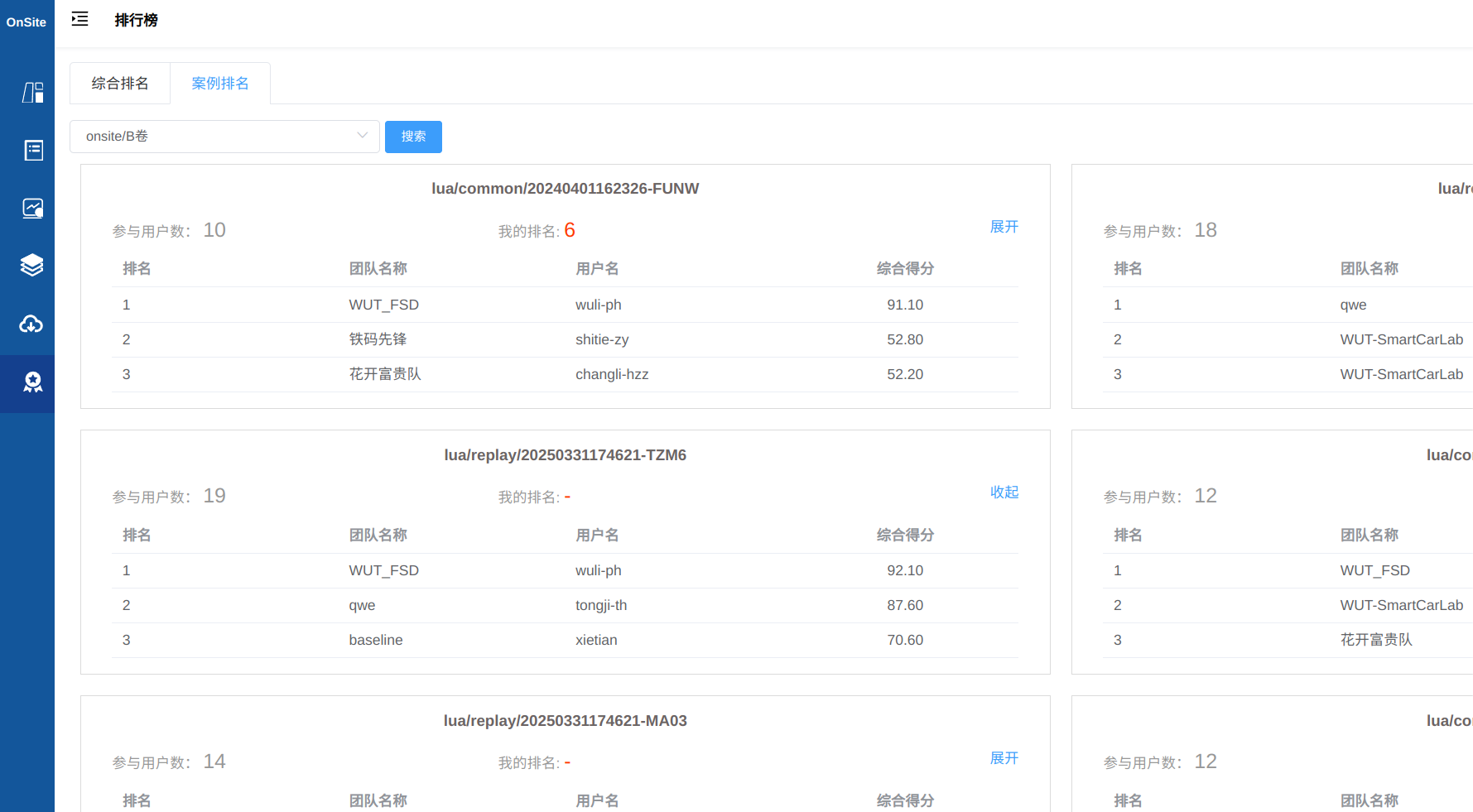
运行作业,模拟器就会显示画面了:
在排行榜这里就能看自己的案例分数了
八、所以我自己的模型怎么弄进去呢
等我哪年研究明白了再补吧

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 12
12 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)