解决robotiq_85机械爪在gazebo中散架(关节解体)的问题
解决robotiq_85机械爪在gazebo中散架的问题1.配置夹爪方法2.插件下载3.编译1.配置夹爪方法这是我之前配置UR5+Robotiq85机械爪的文章https://blog.csdn.net/qq_44642372/article/details/123995916那时候遇到了机械爪在gazebo中仿真时会散架的问题,也就是机械爪的各个关节很快会相互分离:当时一直没找到原因,到后来编译
·
1.配置夹爪方法
这是我之前配置UR5+Robotiq85机械爪的文章
https://blog.csdn.net/qq_44642372/article/details/123995916
那时候遇到了机械爪在gazebo中仿真时会散架的问题,也就是机械爪的各个关节很快会相互分离: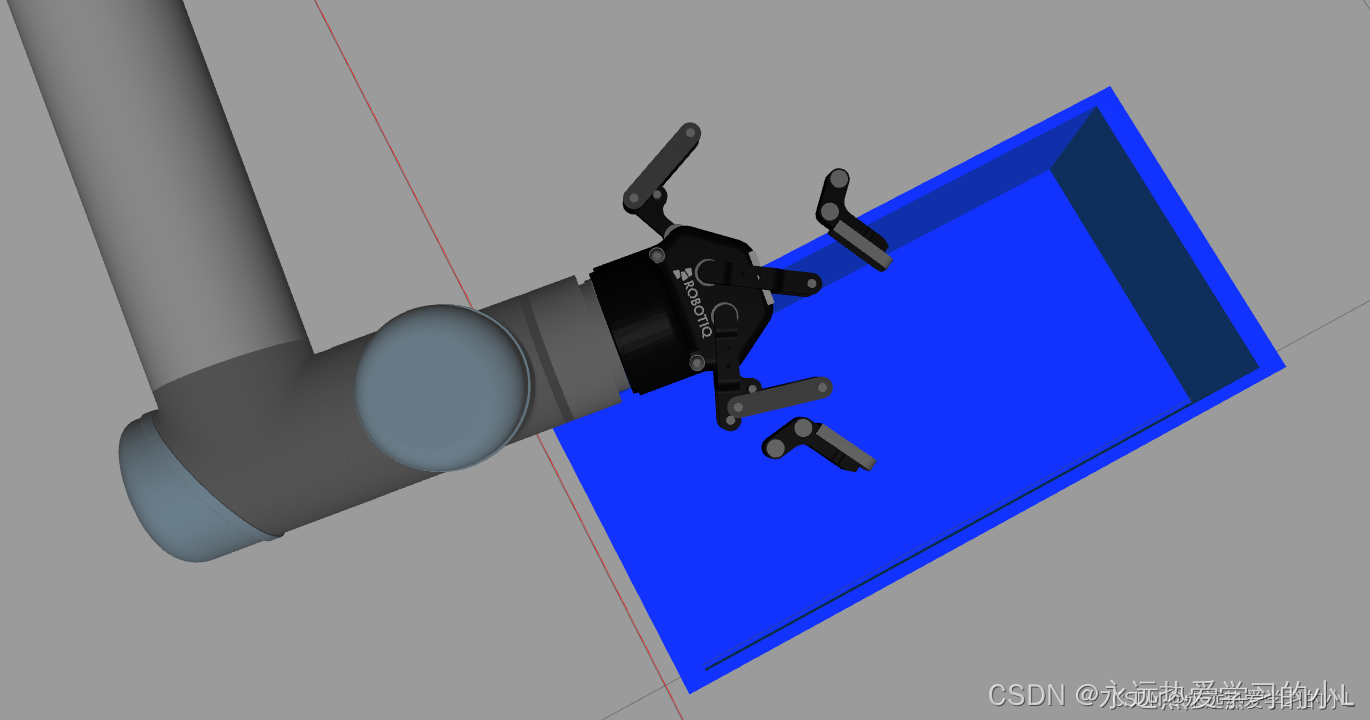
当时一直没找到原因,到后来编译了一下一位好友给我发的功能包(在这里非常感谢,真的解决了我的大问题了!),我又回来运行我的包,突然就管用了,也没弄清到底是为什么。
后来我重装系统,再运行我的包,不出所料又不行了。
然后我把朋友的功能包里的gazebo插件全都复制过来,然后重新编译,就没有问题了。
2.插件下载
所有用到的插件我已经上传到github上,需要的可以下载:
https://github.com/Luchuanzhao/gripper_breakdown_solution
3.编译
下载完成之后直接放到ros工作空间的src下,运行catkin_make,如果有重复的插件,我建议是把原来的先移到别的文件夹或者直接删除,就是先不用原来的插件。编译完再运行launch文件应该就没问题了。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 4
4 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)