【ROS&GAZEBO】解决“is neither a launch file in package ”的问题
这两天有小伙伴问到在安装完rotors后出现如下问题:这个问题其实是ros环境没有配置好,运行下面的命令,将catkub_ws加入ros的工作空间mkdir -p ~/catkin_ws/srccd ~/catkin_ws/srccatkin_init_workspace# initialize your catkin workspacewstool initcd ~/catkin_ws/catk
·
这两天有小伙伴问到在安装完rotors后出现如下问题: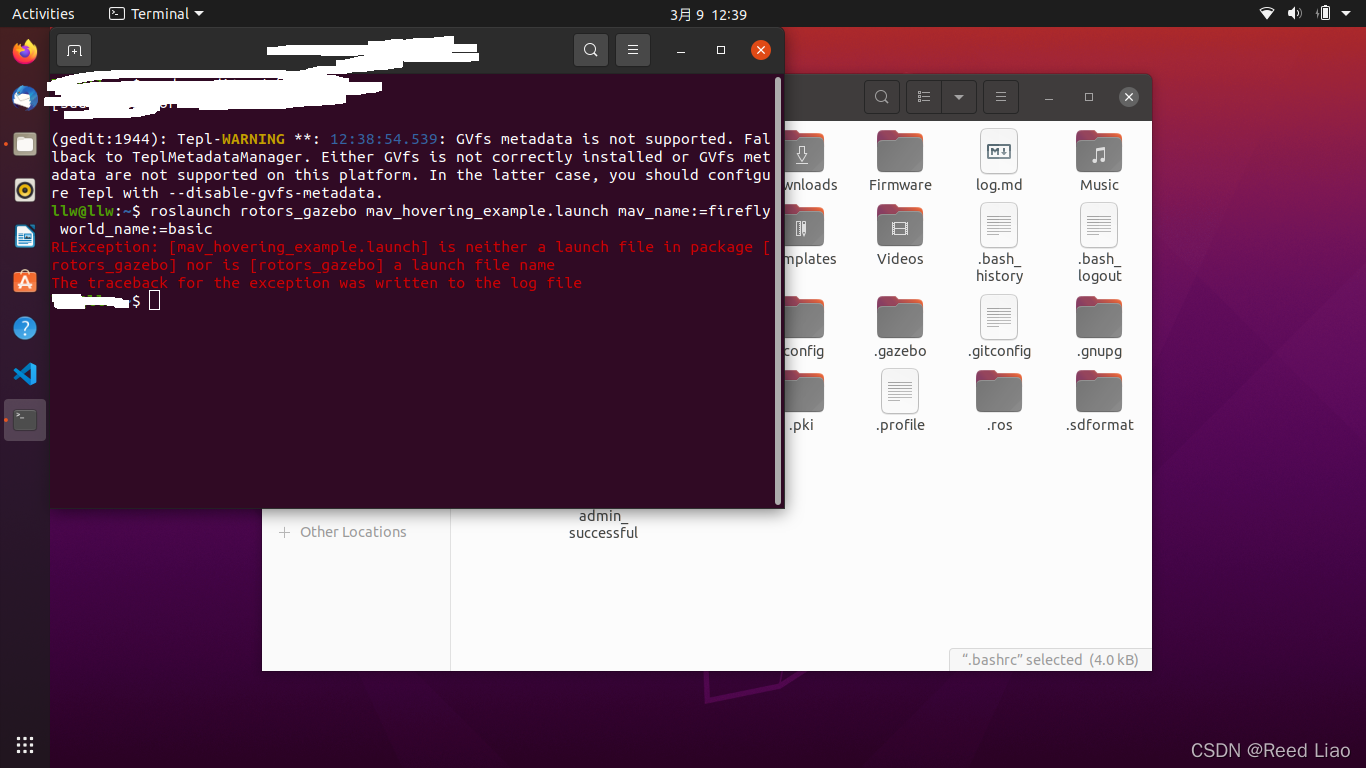
这个问题其实是ros环境没有配置好,运行下面的命令,将catkub_ws加入ros的工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace # initialize your catkin workspace
wstool init
cd ~/catkin_ws/
catkin init # If you haven't done this before.
catkin build
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
一定要提前初始化catkin_ws和配置环境
再运行下面命令,可以找到rotors包,就说明没有问题了
rospack find rotors_gazebo
参考:https://blog.csdn.net/zhelijun/article/details/88868993
喜欢的朋友可以点个赞,关注微信公众号相互交流:Reed UAV

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 1
1 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)