如何检验是否成功安装上ROS(小乌龟仿真)
在ubantu系统上ctr+alt+T打开一个终端,输入。出现小乌龟就证明安装成功。再打开另一个终端,输入。
·
在ubantu系统上ctr+alt+T打开一个终端,输入
roscore
启动ros
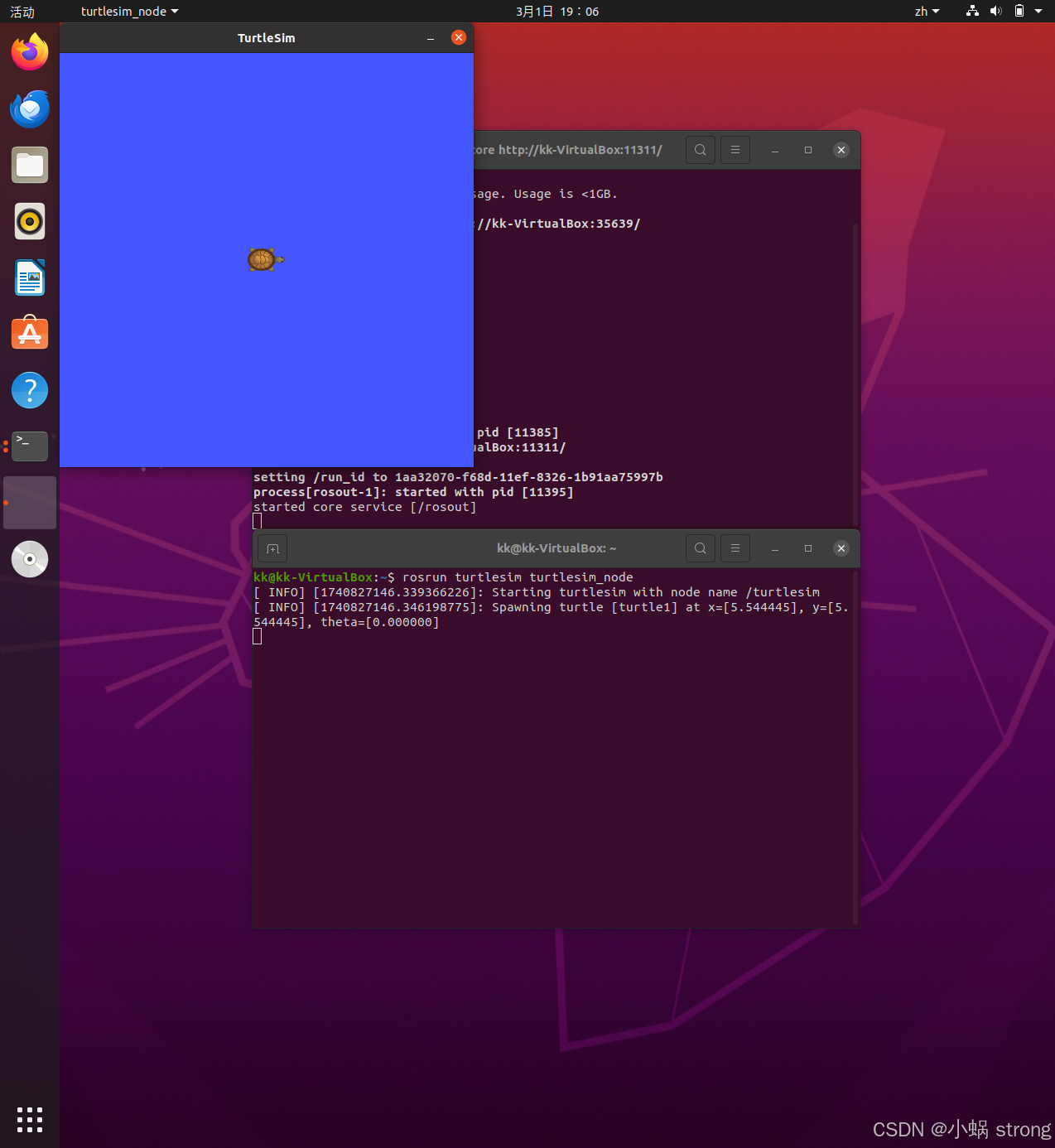
再打开另一个终端,输入
rosrun turtlesim turtlesim_node
出现小乌龟就证明安装成功。
控制小乌龟移动,按下键盘方向键即可对小乌龟进行控制。
rosrun turtlesim turtle_teleop_key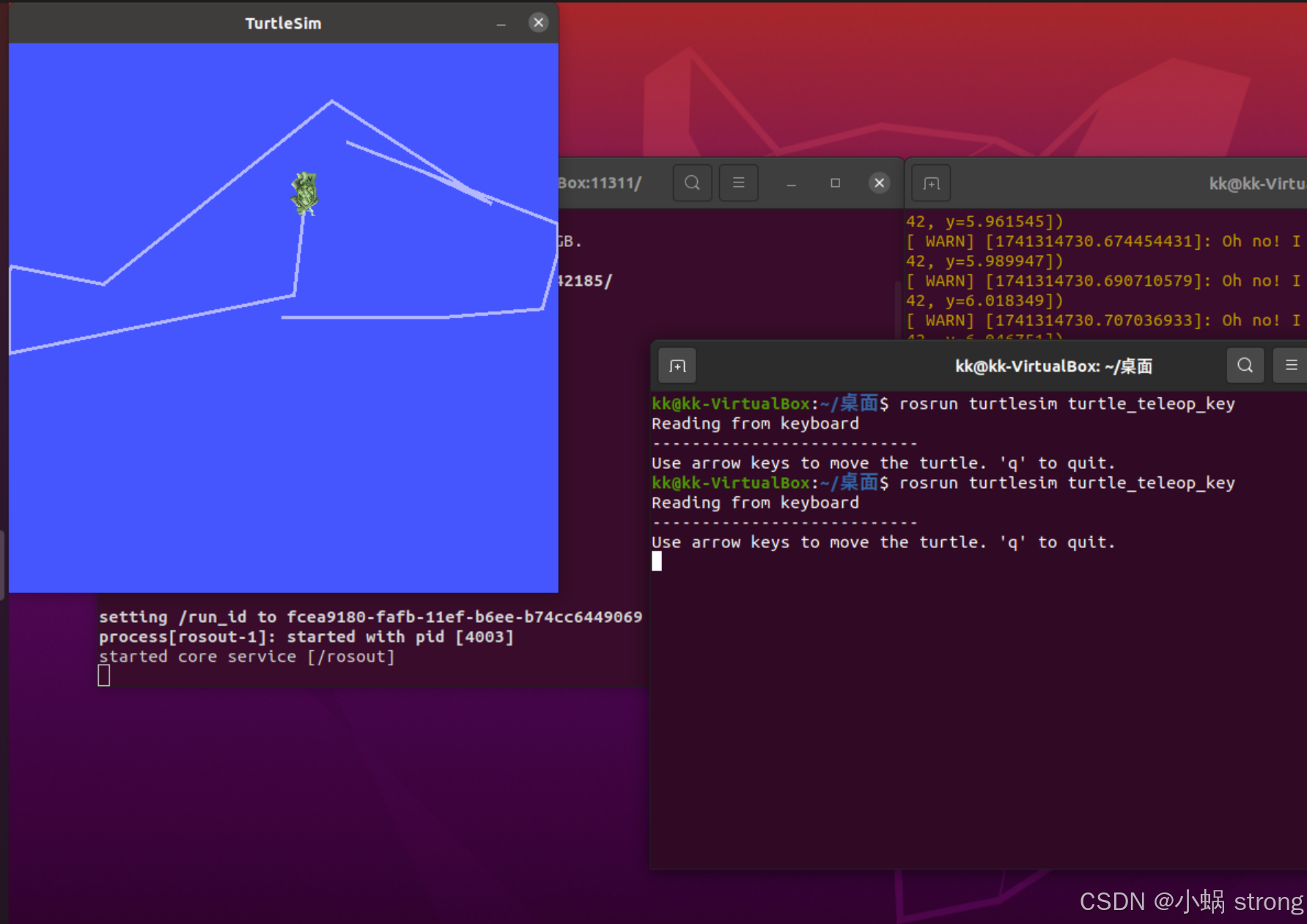

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)