小车综合玩法--1.小车红外巡线
通过四路巡线模块与小车结合,实现小车巡黑线。
·
一、实验准备
通过四路巡线模块与小车结合,实现小车巡黑线。
- 小车接线已安装
- 调试四路巡迹模块。调节四路循迹模块旋钮,调节成遇黑线时,指示灯亮;不是黑线时,指示灯灭。
二、实验原理
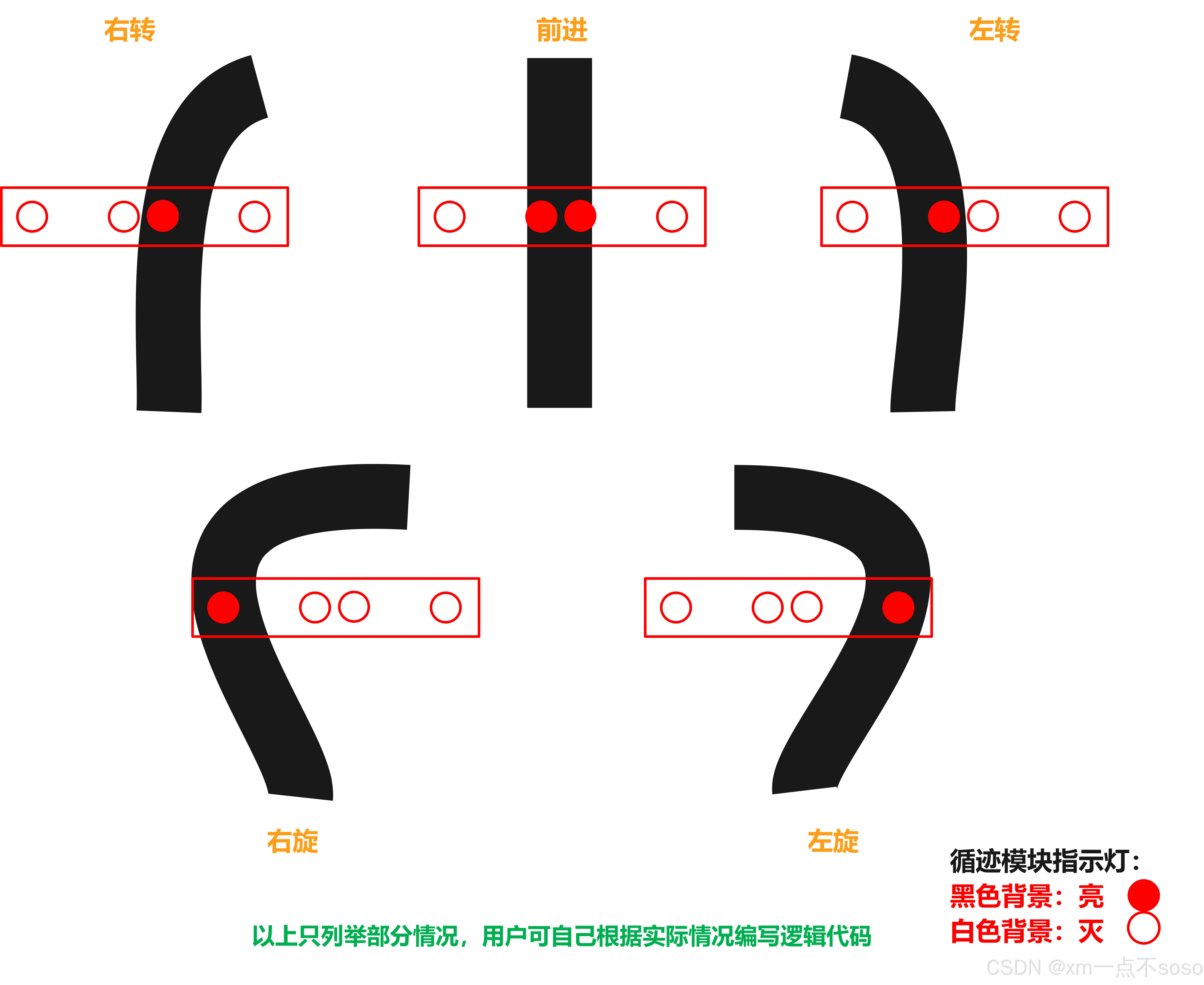
检测不同形状的赛道时,四路巡线传感器的状态,如下图所示。根据传感器状态来控制小车进行不同的运动。
三、实验源码
import sys
sys.path.append('/home/pi/project_demo/lib')
#导入麦克纳姆小车驱动库 Import Mecanum Car Driver Library
from McLumk_Wheel_Sports import *
speed =30#30
try:
while True:
# 从I2C读取巡线传感器数据 Read line sensor data from I2C
track_data = bot.read_data_array(0x0a, 1)
track = int(track_data[0])
# 解析巡线传感器的状态 Analyze the status of the line patrol sensor
x1 = (track >> 3) & 0x01
x2 = (track >> 2) & 0x01
x3 = (track >> 1) & 0x01
x4 = track & 0x01
"""
X2 X1 X3 X4
| | | |
L1 L2 R1 R2
"""
lineL1=x2
lineL2=x1
lineR1=x3
lineR2=x4
if lineL1 == 0 and lineL2 == 0 and lineR1 == 0 and lineR2 == 0: # 都是黑色, 加速前进 All black, speed up
print("1")
print(lineL1,lineL2,lineR1,lineR2)
move_forward(int(speed))
elif( (lineL2 == 0 or lineL1 == 0) and lineR2 == 0):#右锐角:右大弯,0表示检测到黑线 Right acute angle: right big bend, 0 means black line is detected
print("2")
print(lineL1,lineL2,lineR1,lineR2)
rotate_right(speed)
time.sleep(0.05)
elif lineL1 == 0 and (lineR2 == 0 or lineR1 == 0): # 左锐角或左大弯 Left sharp angle or left sharp bend
print("3")
print(lineL1,lineL2,lineR1,lineR2)
rotate_left(int(speed*1.5)) # 左急转弯 Sharp left turn
time.sleep(0.15)
elif lineL1 == 0: # 左最外侧检测 Left outermost detection
print("4")
print(lineL1,lineL2,lineR1,lineR2)
rotate_left(speed) # 左急转弯 Sharp left turn
time.sleep(0.02)
elif lineR2 == 0: # 右最外侧检测 Right outermost detection
print("5")
print(lineL1,lineL2,lineR1,lineR2)
rotate_right(speed)
time.sleep(0.01)
elif lineL2 == 0 and lineR1 == 1: # 中间黑线上的传感器微调车左转 The sensor on the middle black line fine-tunes the car to turn left
print("6")
print(lineL1,lineL2,lineR1,lineR2)
rotate_left(int(speed)) # 左转 Turn left
elif lineL2 == 1 and lineR1 == 0: # 中间黑线上的传感器微调车右转 The sensor on the middle black line fine-tunes the car to turn right
print("7")
print(lineL1,lineL2,lineR1,lineR2)
rotate_right(int(speed)) #右转 Turn right
elif lineL2 == 0 and lineR1 == 0: # 都是黑色, 加速前进 All black, speed up
print("8")
print(lineL1,lineL2,lineR1,lineR2)
move_forward(speed)
# 等待一段时间再进行下一次检测 Wait for a while before the next test
time.sleep(0.01)
except KeyboardInterrupt:
# 当用户中断程序时,确保所有电机停止 Ensure that all motors stop when the user interrupts the program
stop()
print("Ending")四、实验现象
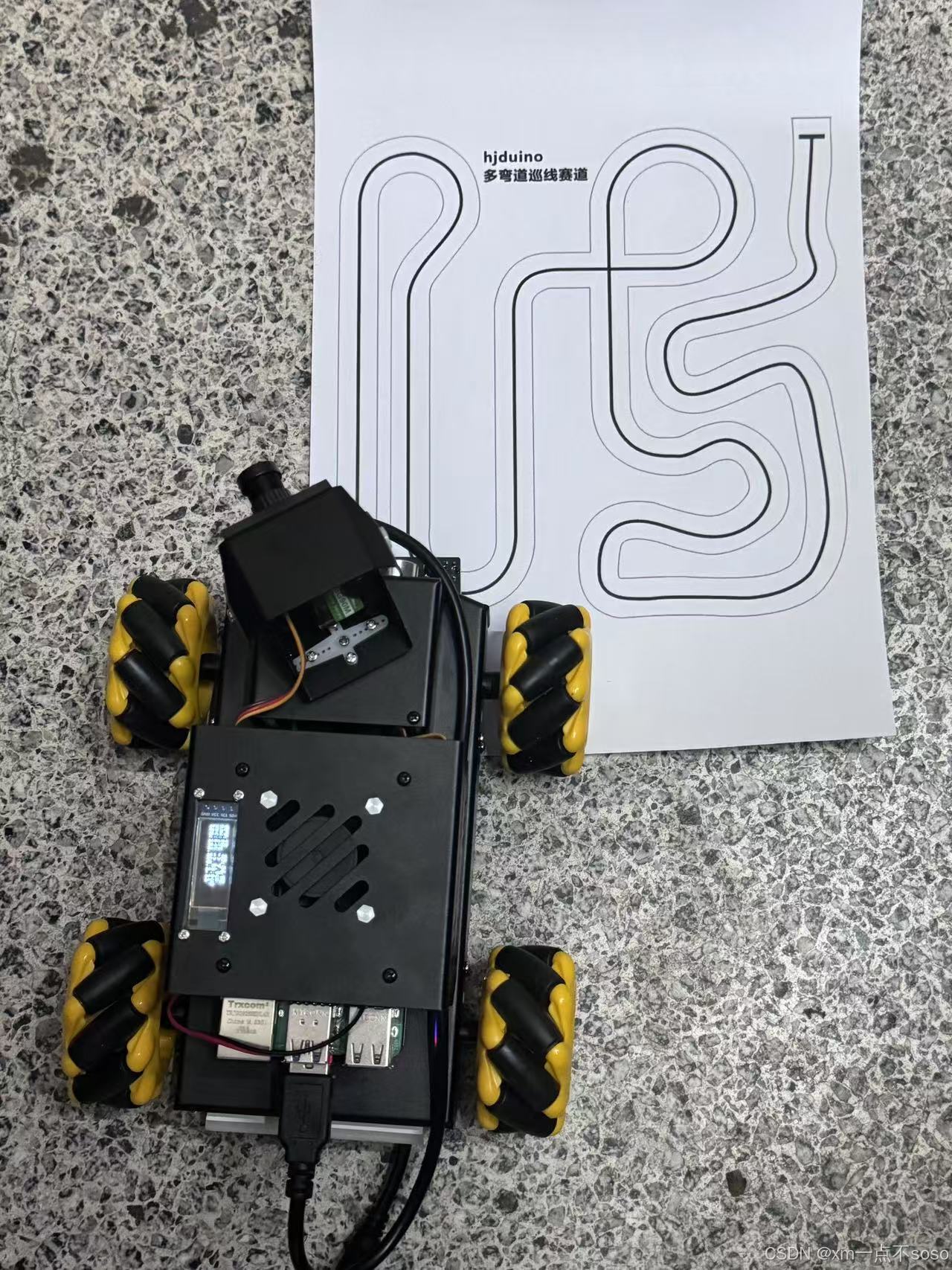
我们把小车放在巡线赛道上,确认已经调节了模块旋钮,调成遇黑线时,指示灯亮后,运行代码块,小车会巡黑线行驶。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 4
4 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)