让我们一起解锁DVS
胜任一些复杂的场景:传统的视觉传感器受限于它的硬件,而导致的低动态感光范围和运动中产生的动态模糊,尤其是在高速运动和复杂光照下的场景。因此在强光条件下,普通相机拍出的照片会有背光等现象,由于普通相机拍摄的图片是在一段曝光时间内的均值,这也导致了在拍摄高速移动的物体或者相机本身发生移动时,拍摄的照片出现模糊的情况。光线过亮或者过暗的场景或光强突变较为明显的场景:车辆从隧道出来后,面对高曝光的场景,帧
制作事件相机的人的灵感就是来自于仿生。在人的眼睛中,会有一部分视觉细胞对动态的东西特别敏感。
揭开DVS面纱
DVS(Dynamic Vision Sensor)--模拟生物视网膜特性的仿生相机--事件相机的一种。
在聊新型相机之前,先聊聊我们常见的RGB相机:各像素点的值都是在同一时间同步获取的绝对光强值。
因此在强光条件下,普通相机拍出的照片会有背光等现象,由于普通相机拍摄的图片是在一段曝光时间内的均值,这也导致了在拍摄高速移动的物体或者相机本身发生移动时,拍摄的照片出现模糊的情况。
就在此时,动态视觉传感器(DVS,dynamic vision sensor)就如天降猛男一般出现了!
咱这样设想一下:你去找到房间里一个角落静放的一本书,但是,如果突然有某个物体动了起来,我们的视线会立刻被吸引过去。传统的相机呈现在我们眼前的便是前者;而事件相机的目的正是后者:敏感地捕捉到运动的物体。
▲ 动图来自网络
DVS的与众不同
事件相机的最基本的原理:当某个像素的亮度变化累计达到一定阈值后,输出一个事件(Event)。
事件具有三要素:时间戳、像素坐标与极性。一个事件表达的是“在什么时间,哪个像素点,发生了亮度的增加或减小”。当场景中由物体运动或光照改变造成大量像素变化时,会产生一系列的事件,这些事件以事件流(Events stream)方式输出。
这就决定了DVS与传统相机的不同之处:
01.动态范围大
帧相机的动态范围通常只能达到60dB,而事件相机的动态范围能达到120dB,甚至会更高。高动态范围可以帮助事件相机在光线极暗、曝光过度、光线突变等情况下,依然能够保持有效的工作。因为事件相机以微秒级分辨率标记时间戳,所有像素是异步的,不是同步的输出。
02.低功耗,低延时
低延迟(<1μs)、极低功耗(1mW):只要亮度一有变化就会输出,且仅输出变化的数据占用了很小的带宽,同时由于事件相机更擅长捕捉亮度变化,所以在较暗和强光场景下也能输出有效数据。相较于传统相机,事件相机是基于神经形态视觉,其基本理念是受生物系统工作方式的启发,检测场景动态的变化,而不是连续分析整个场景。
联合影像在DVS上的落地场景
在自动驾驶上的应用
防御城区场景中的“鬼探头”:传统帧相机在面对横向的鬼探头场景时,无法快速做出反应,而事件相机可以更快地感知到危险信号;
高速场景下的避障:事件相机可以依靠它的低时延性优势,快速识别,并及时做出避障动作;
光线过亮或者过暗的场景或光强突变较为明显的场景:车辆从隧道出来后,面对高曝光的场景,帧相机会受到高爆光的影响,从而产生失效的工况,而事件相机不会受到影响。
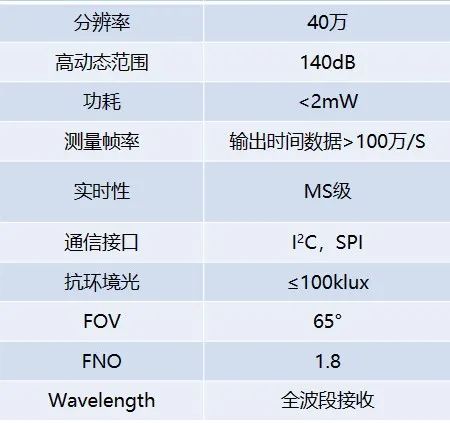
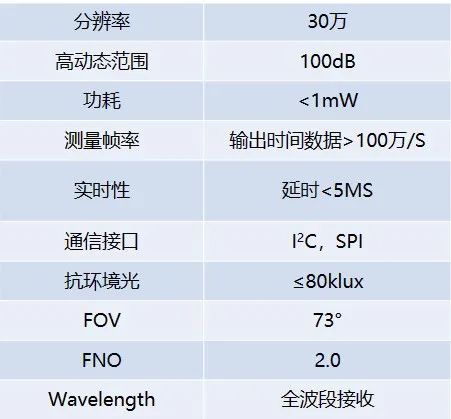
▲ 联合影像camera module配置
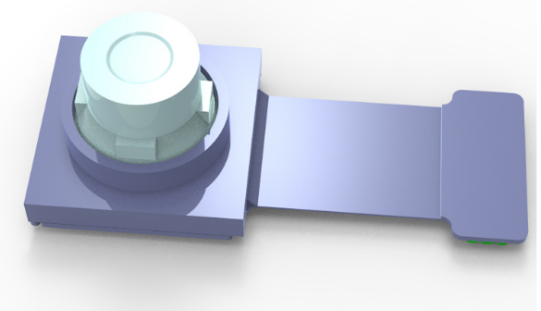
▲ camera module 渲染图
在机器人上的应用
胜任一些复杂的场景:传统的视觉传感器受限于它的硬件,而导致的低动态感光范围和运动中产生的动态模糊,尤其是在高速运动和复杂光照下的场景。机器人能够快速目标检测,低延迟测距,以达到快速避障的目的。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 28
28 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)