DCDC电源波特图理解
DC-DC 转换器的增益要求大于 -10 dB 是为了确保:稳态误差小:高增益减少输出电压与目标值的偏差。动态响应快:快速应对负载突变和输入电压变化。稳定性强:在满足带宽需求的同时保证系统稳定。
一、波特图
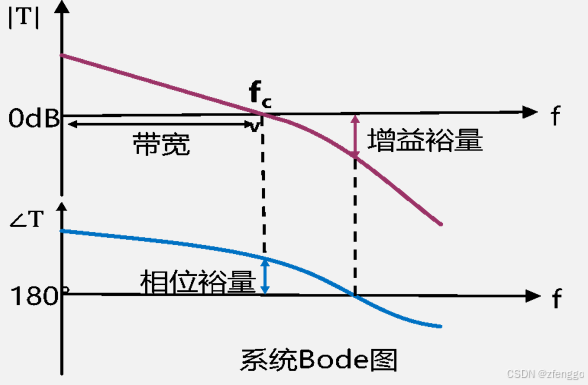
其中fc为交叉频率(穿越频率),穿越频率可以视为系统的闭环带宽
二、增益和相位设计要求
1.相位裕度能够达到大于45°,避免相位降低-180°
为什么避免相位降低到 -180°
a. 避免负反馈变正反馈
在DC-DC转换器中,如果环路相位降低到 -180°,负反馈信号会变成正反馈信号。
正反馈会导致环路信号不断放大,系统进入不稳定状态,表现为振荡或不规则波形。
b. 系统动态性能受影响
即使系统没有完全降低到 -180°,但如果相位裕度很小(接近 -180°),环路对扰动和噪声的响应会变得非常敏感,导致:
输出电压波动。
动态性能恶化(如过冲或欠冲加剧)。
c. 稳定性的鲁棒性
设计中通常需要 足够的相位裕度(例如 45° 或更多) 来保证在各种工作条件下系统仍然稳定。
这有助于抵抗外部干扰或元件参数变化(如电感、电容的温漂)。
2.带宽设置为开关频率的1/10~1/5
为什么当电源设计的带宽较宽时,器件对电流负载变化的响应会更快。
频域分析:负载变化中的高频分量
负载变化通常包含不同频率的分量:
突变负载变化(如电流的瞬态跳变)会包含高频分量。
系统的带宽决定了其是否能感知并控制这些高频分量。
如果带宽较窄,高频分量超出带宽范围,控制器无法快速感知和响应负载的快速变化,导致输出电压出现较大的过冲或欠冲。
实际设计中的权衡
虽然宽带宽带来更快的响应速度,但设计中需要权衡以下因素:
a. 系统稳定性
带宽越宽,相位裕度可能会减小,系统更容易不稳定。因此需要合理设计补偿网络,确保系统在宽带宽下仍然稳定。
b. 噪声和EMI问题
宽带宽会放大高频噪声,使输出波形受干扰的可能性增加。因此,需要优化滤波设计。
c. 器件的限制
宽带宽可能要求更快的控制器和更优质的功率元件(如MOSFET和驱动器),从而增加设计成本和复杂性。
3.增益一般要求大于-10dB,保持 20~60 dB。类似PID的P值
3.1 益与误差的关系
a. 增益决定稳态误差
系统的 稳态误差 与开环增益直接相关。在控制理论中,系统的输出误差与开环增益
A 的关系为:
如果开环增益小于 -10 dB(对应增益 A<0.316),系统对输入参考值和负载扰动的调节能力会大幅下降,稳态误差显著增加,导致输出电压不稳定或不准确。
b. 精确电压调节的需求
DC-DC 转换器需要提供精确的输出电压(例如给 CPU、GPU 供电时误差可能要求小于 1%)。为了满足这种高精度需求,低频段的开环增益需要足够高(通常 > 20 dB),即输出电压能够快速跟随参考值变化,并有效抵抗负载扰动。
2. 动态响应能力
a. 高增益提升动态性能
开环增益高可以增强系统对瞬态负载变化的响应能力:
当负载电流发生突变时,控制系统能够快速检测输出电压的偏差,并及时调整 PWM 占空比以恢复电压。
增益越低,系统对扰动的响应速度和调节能力越弱,可能导致输出电压出现较大过冲或欠冲。
3.2 实际设计中增益的目标
在 DC-DC 转换器中,增益通常设计为在低频段保持 20~60 dB,以保证稳态精度和动态性能。
增益下降的速度通常控制为 -20 dB/dec(一个频率十倍变化时增益降低 20 dB),从而兼顾带宽、稳定性和瞬态性能。
3.3 总结
DC-DC 转换器的增益要求大于 -10 dB 是为了确保:
稳态误差小:高增益减少输出电压与目标值的偏差。
动态响应快:快速应对负载突变和输入电压变化。
稳定性强:在满足带宽需求的同时保证系统稳定。
4.带宽越宽,相位越低,因此需进行权衡

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 24
24 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)