STM32简单驱动步进电机(F407标准库&H723Cubemx)
单片机型号:STM32F104ZGT6步进电机:YK28HB40-01A驱动器:YKD2204M-Plus接线方式:pu+:接对应的产生PWM的引脚,这里接PF9,对应TIM14_CH1通道!pu-:接单片机的GND;DR+:接单片机的3.3V(电机转动的方向固定)或者单片机的控制引脚这里是PF8DR-:接单片机的GND;这里没有使用电机的使能引脚!!!-V:接24V的负极+V:接24V的正极A+
配置
单片机型号:STM32F104ZGT6
步进电机:YK28HB40-01A
驱动器:YKD2204M-Plus

接线方式:
pu+:接对应的产生PWM的引脚,这里接PF9,对应TIM14_CH1通道!
pu-:接单片机的GND;
DR+:接单片机的3.3V(电机转动的方向固定)或者单片机的控制引脚这里是PF8
DR-:接单片机的GND;
这里没有使用驱动器的电机使能引脚!!!
-V:接24V的负极
+V:接24V的正极
A+:接的步进电机的红线(需要参考对应的原理图,不同的电机接法存在差异)
A-:步进电机的蓝线
B+:步进电机的绿线
B-:步进电机的黑线
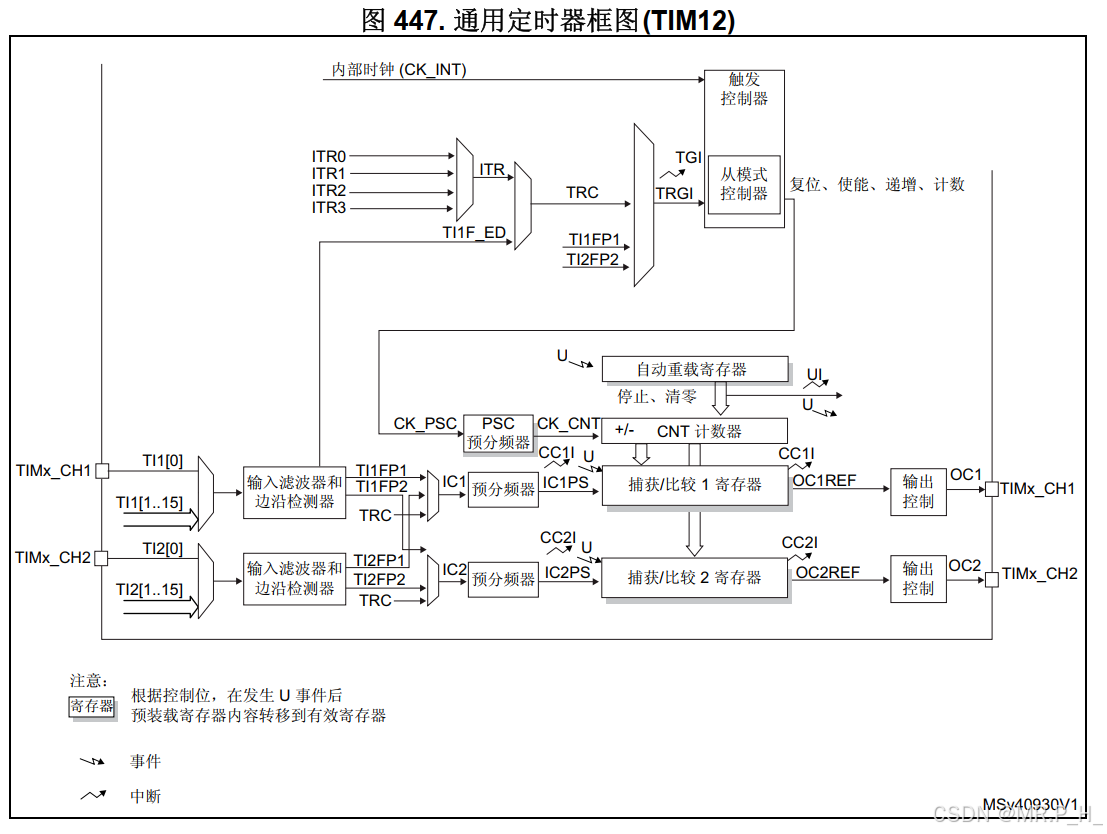
采用定时器主从模式,发送固定脉冲,控制步进电机的转动;
比如在驱动器上,将脉冲调到1600挡位,表示当有1600个脉冲到来时,电机转动一周。如果输入800个脉冲,则电机就转动半圈;
主定时器采用TIM14_CH1;
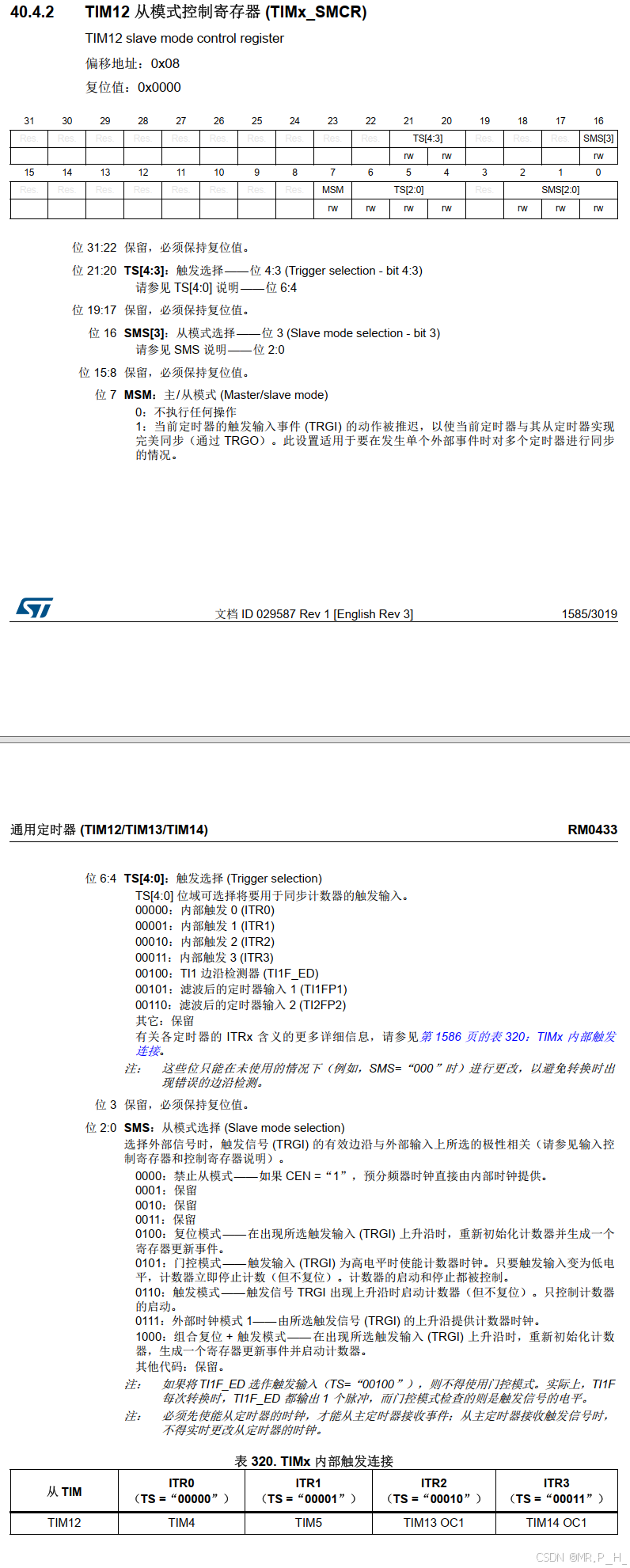
从定时器采用TIM12_ITR3;





表72在407中文手册370页; 表79在464页; 图165在446页; 图166在447页
代码部分
采用标准库进行开发,先创建好工程!
再创建一个pwm.c和pwm.h文件就可以驱动了!
pwm.c
#include "PWM.h"
#include "stm32f4xx.h"
/*
*PF9 TIM14_CH1通道
*PF8 方向引脚
*/
void TIM14_PWM_Init(void) //主定时器 //uint32_t arr,uint32_t psc
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); //使能定时器 14 时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); //使能PORTF时钟
GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); //GPIOF9 复用为定时器 14
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOF9
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF,&GPIO_InitStructure); //初始化PF9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //GPIOF8
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //复用推挽输出
GPIO_Init(GPIOF,&GPIO_InitStructure); //初始化PF8
//TIM_InternalClockConfig()
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period =100-1; //arr; //设置自动重装载值 100-1
TIM_TimeBaseStructure.TIM_Prescaler =1050-1;//psc; //设置预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim 0=TIM_CKD_DIV1
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInit(TIM14, &TIM_TimeBaseStructure); //根据指定的参数初始化 TIMx 的
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure); //默认的初始化
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择 PWM 模式 1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity =TIM_OCPolarity_High;//输出极性高 //TIM_OCPolarity_Low; //输出极性低
TIM_OCInitStructure.TIM_Pulse=50;//CCR
TIM_OC1Init(TIM14, &TIM_OCInitStructure); //初始化 TIM
//TIM_SelectMasterSlaveMode();
//TIM_SelectOutputTrigger();
TIM_OC1PreloadConfig(TIM14,TIM_OCPreload_Enable); //通道1的CCR可以更改
TIM_ARRPreloadConfig(TIM14,ENABLE); //使能ARR预装载寄存器
TIM_Cmd(TIM14, DISABLE); //使能 TIM14
}
void TIM12_Init(void)//从定时器
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM12,ENABLE); //使能定时器 12 时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 65535; //设置自动重装载值 100-1
TIM_TimeBaseStructure.TIM_Prescaler =1-1; //设置预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim 0=TIM_CKD_DIV1
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInit(TIM12, &TIM_TimeBaseStructure); //根据指定的参数初始化 TIMx 的
//TIM_SelectMasterSlaveMode(TIM12,);
TIM_SelectInputTrigger(TIM12,TIM_TS_ITR3); //TIM14主 TIM12从:ITR3
TIM_SelectSlaveMode(TIM12,TIM_SlaveMode_External1);//从模式
TIM_ITConfig(TIM12,TIM_IT_Update,DISABLE);
TIM_ARRPreloadConfig(TIM12,ENABLE); //使能ARR预装载寄存器
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel=TIM8_BRK_TIM12_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM12, DISABLE); //使能 TIM12
}
/**
uint16_t Num 发送的脉冲数(从定时器的ARR值)
uint8_t Dir 步进电机的旋转方向
uint16_t Speed 速度(更改主定时器的ARR值)
*/
void PWM_Output_Speed(uint16_t Num,uint8_t Dir,uint16_t Speed)
{
if(Dir==1)
{
GPIO_ResetBits(GPIOF,GPIO_Pin_8);//正转
}
else
{
GPIO_SetBits(GPIOF,GPIO_Pin_8); //反转
}
TIM_Cmd(TIM12, DISABLE);//关闭TIM12使能
TIM_SetAutoreload(TIM12,Num);//从新设置ARR计数值
TIM_GenerateEvent(TIM12,TIM_EventSource_Update);//配置由软件生成定时器事件,新修改ARR计数值后,马上软件更改一次事件
TIM_Cmd(TIM12, ENABLE); //使能 TIM12
TIM_ClearITPendingBit(TIM12,TIM_IT_Update);//清楚中断标志位
TIM_ITConfig(TIM12,TIM_IT_Update,ENABLE);//开启定时器12的中断
TIM_SetAutoreload(TIM14,Speed);//从新设置ARR计数值
TIM_GenerateEvent(TIM14,TIM_EventSource_Update);//配置由软件生成定时器事件,新修改ARR计数值后,马上软件更改一次事件
TIM_SetCompare1(TIM14,Speed/2); //设置CCR的值为ARR的一半,占空比为50%
TIM_GenerateEvent(TIM14,TIM_EventSource_CC1);//配置后由软件生成通道一的事件,马上生效
TIM_Cmd(TIM14, ENABLE); //使能 TIM14
}
void TIM8_BRK_TIM12_IRQHandler(void)
{
if(TIM_GetITStatus(TIM12,TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM12,TIM_IT_Update);
TIM_Cmd(TIM12, DISABLE);//关闭TIM12使能
TIM_Cmd(TIM14, DISABLE);//关闭TIM14使能
TIM_ITConfig(TIM12,TIM_IT_Update,DISABLE);//关闭定时器12的中断
}
}
pwm.h
#ifndef __PWM_H__
#define __PWM_H__
#include "stm32f4xx.h"
void TIM14_PWM_Init(void); //uint32_t arr,uint32_t psc
void TIM12_Init(void);
void PWM_Output_Speed(uint16_t Num,uint8_t Dir,uint16_t Speed);
#endif
main函数部分
#include "stm32f4xx.h" // Device header
#include "pwm.h"
int main()
{
TIM14_PWM_Init(); //168M/168=1Mhz的计数频率,重装载值100,所以PWM频率为 1M/100=1Khz.
TIM12_Init();
PWM_Output_Speed(3200,0,40);//发送的脉冲数 步进电机的旋转方向 速度(更改主定时器的ARR值)
while(1)
{
}
}
通过PWM_Output_Speed(3200,0,40);输入 3200个脉冲,电机逆时针转2圈。最后一位参数为速度;注意这里驱动器的挡位为1600(可以自己调整);
PWM_Output_Speed(1600,1,40);就是沿顺时针方向旋转一周;
通过修改PWM_Output_Speed();可以实现电机的角度、方向、速度控制。
其他方式的pwm简单驱动
采用定时器的翻转模式,驱动电机的转动:
#include "PWM.h"
#include "stm32f4xx.h"
/*
*PF9 TIM14_CH1通道
*PF8 为方向引脚
*/
uint16_t CCR1=1000;
void TIM14_PWM_Init(uint32_t arr,uint32_t psc)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); //使能定时器 14 时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); //使能PORTF时钟
GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); //GPIOF9 复用为定时器 14
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOF9
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF,&GPIO_InitStructure); //初始化PF9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //GPIOF8
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //复用推挽输出
GPIO_Init(GPIOF,&GPIO_InitStructure); //初始化PF8
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = arr-1; //设置自动重装载值 输出频率
TIM_TimeBaseStructure.TIM_Prescaler =psc-1; //设置预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim 0=TIM_CKD_DIV1
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInit(TIM14, &TIM_TimeBaseStructure); //根据指定的参数初始化 TIMx 的
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle; //翻转模式 //TIM_OCMode_PWM1; //选择 PWM 模式 1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity =TIM_OCPolarity_High;//输出极性高 //TIM_OCPolarity_Low; //输出极性低
TIM_OCInitStructure.TIM_Pulse=CCR1; //CCR
TIM_OC1Init(TIM14, &TIM_OCInitStructure); //初始化 TIM
TIM_OC1PreloadConfig(TIM14, TIM_OCPreload_Disable);//失能 //使能TIM14在CCR1上的预装载寄存器 TIM_OCPreload_Enable
// TIM_ARRPreloadConfig(TIM14,ENABLE);//ARPE使能
TIM_ClearFlag(TIM14,TIM_FLAG_CC1); //清除定时器中断标志位
TIM_ITConfig(TIM14,TIM_FLAG_CC1,ENABLE); //开启定时器比较中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel=TIM8_TRG_COM_TIM14_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM14, ENABLE); //使能 TIM14
}
void TIM8_TRG_COM_TIM14_IRQHandler(void)
{
uint16_t num = 0;
if(TIM_GetITStatus(TIM14,TIM_FLAG_CC1)==SET)
{
TIM_ClearITPendingBit(TIM14,TIM_FLAG_CC1);
num=TIM_GetCapture1(TIM14);
TIM_SetCompare1(TIM14,num+CCR1);
}
}
在main函数中调用TIM14_PWM_Init(65536,1);
运行结果就是使电机沿单一方向转动,通过修改ARR值可以调速;
通过在main函数调用下面函数,可控制电机的旋转方向;(引脚接线注意接对)
GPIO_SetBits(GPIOF,GPIO_Pin_8); //反转
GPIO_ResetBits(GPIOF,GPIO_Pin_8); //正转直接输出pwm波形的驱动
pwm.c
#include "PWM.h"
#include "stm32f4xx.h"
//#include "uart.h"
/*
*PF9 TIM14_CH1通道
*
*/
void TIM14_PWM_Init(uint32_t arr,uint32_t psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); //使能定时器 14 时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); //使能PORTF时钟
GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); //GPIOF9 复用为定时器 14
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOF9
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF,&GPIO_InitStructure); //初始化PF9
TIM_TimeBaseStructure.TIM_Period = arr; //设置自动重装载值 100-1
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim 0=TIM_CKD_DIV1
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInit(TIM14, &TIM_TimeBaseStructure); //根据指定的参数初始化 TIMx 的
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择 PWM 模式 1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity =TIM_OCPolarity_High; //TIM_OCPolarity_Low; //输出极性低
TIM_OCInitStructure.TIM_Pulse=50;//CCR
TIM_OC1Init(TIM14, &TIM_OCInitStructure); //初始化 TIM
TIM_Cmd(TIM14, ENABLE); //使能 TIM14
}
在main函数中调用TIM14_PWM_Init(100-1,1680-1);
运行结果就是使电机沿单一方向转动,通过修改ARR值可以调速;
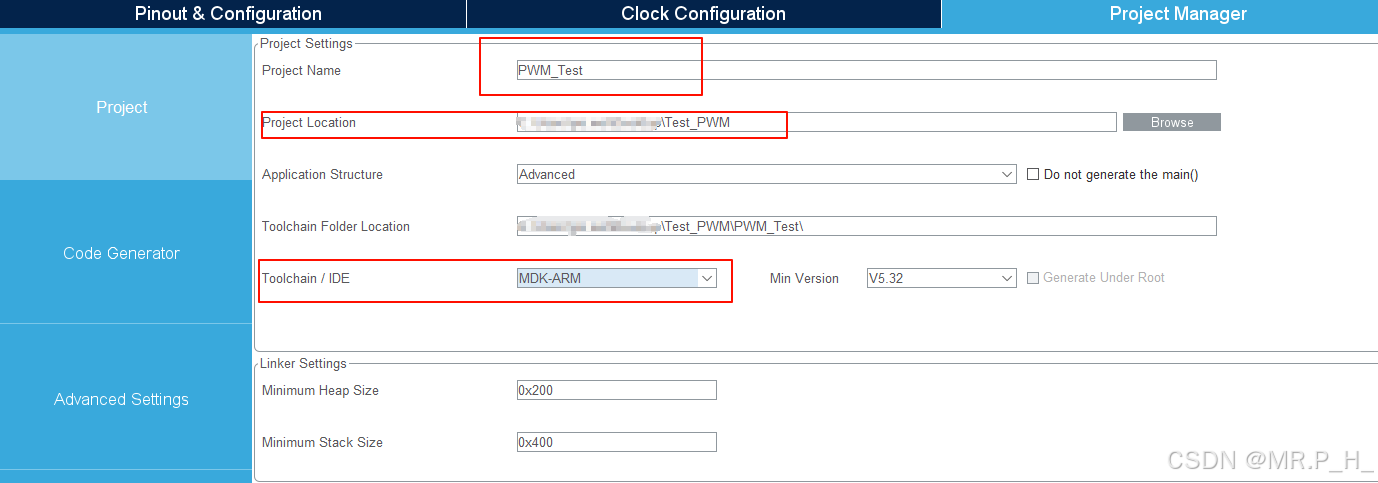
使用cubemx配置H7主从定时器
250421补充!
芯片:STM32H723ZGTx
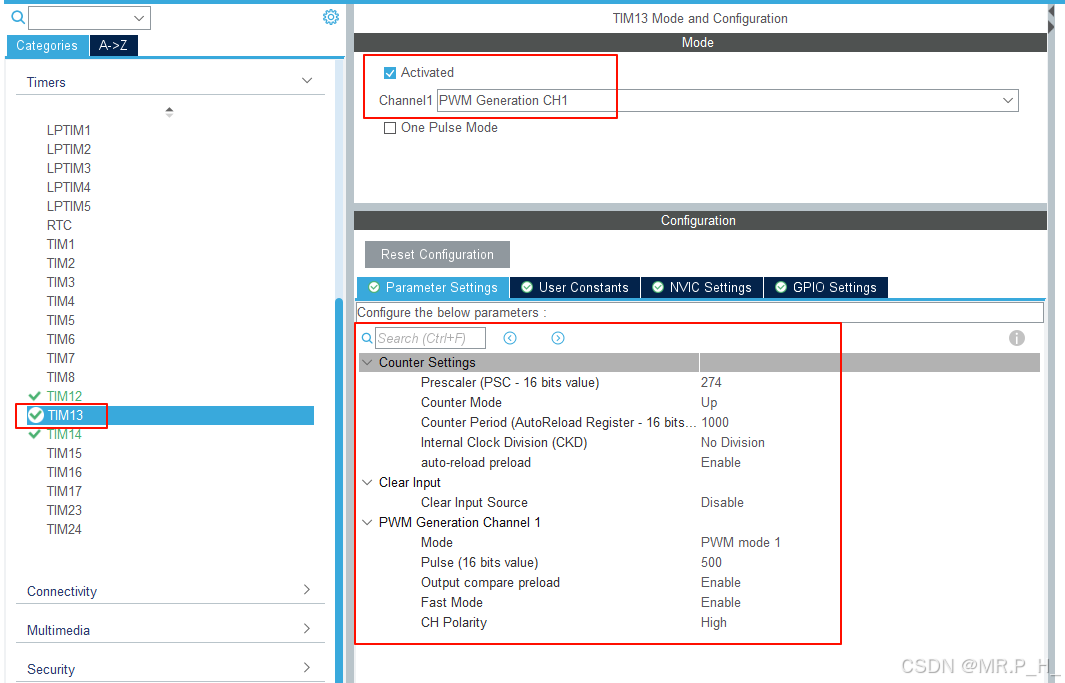
主定时器是TM13
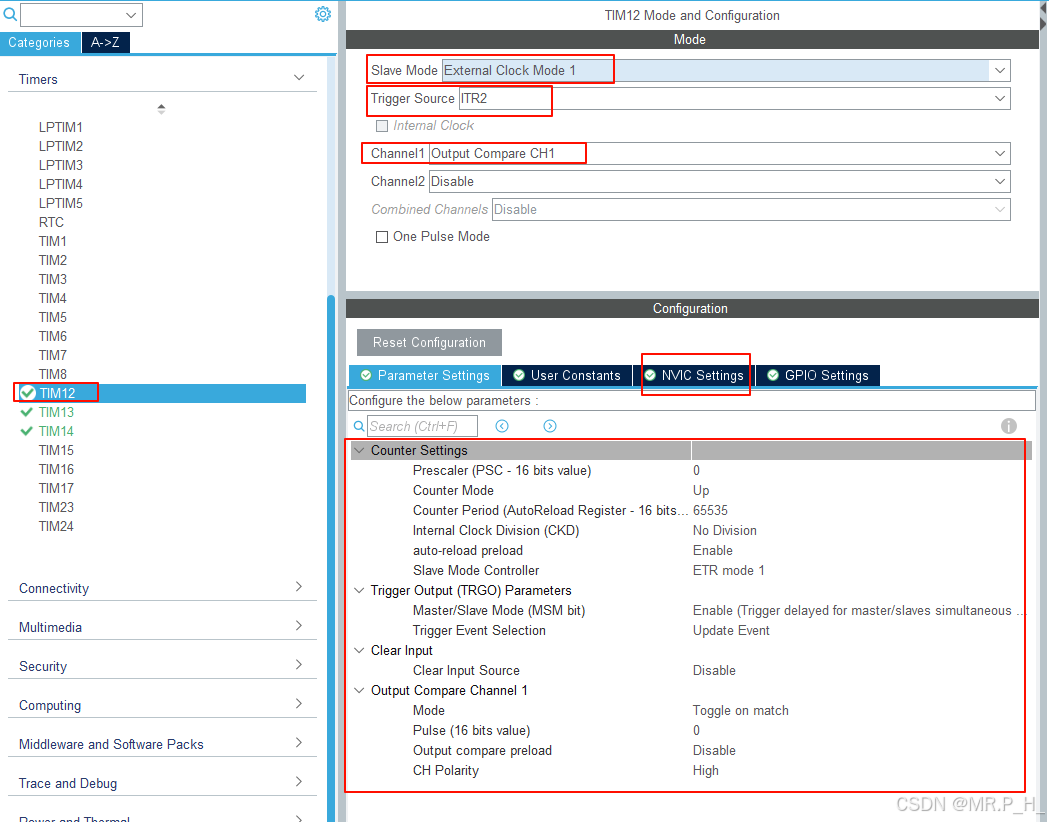
从定时器是TM12
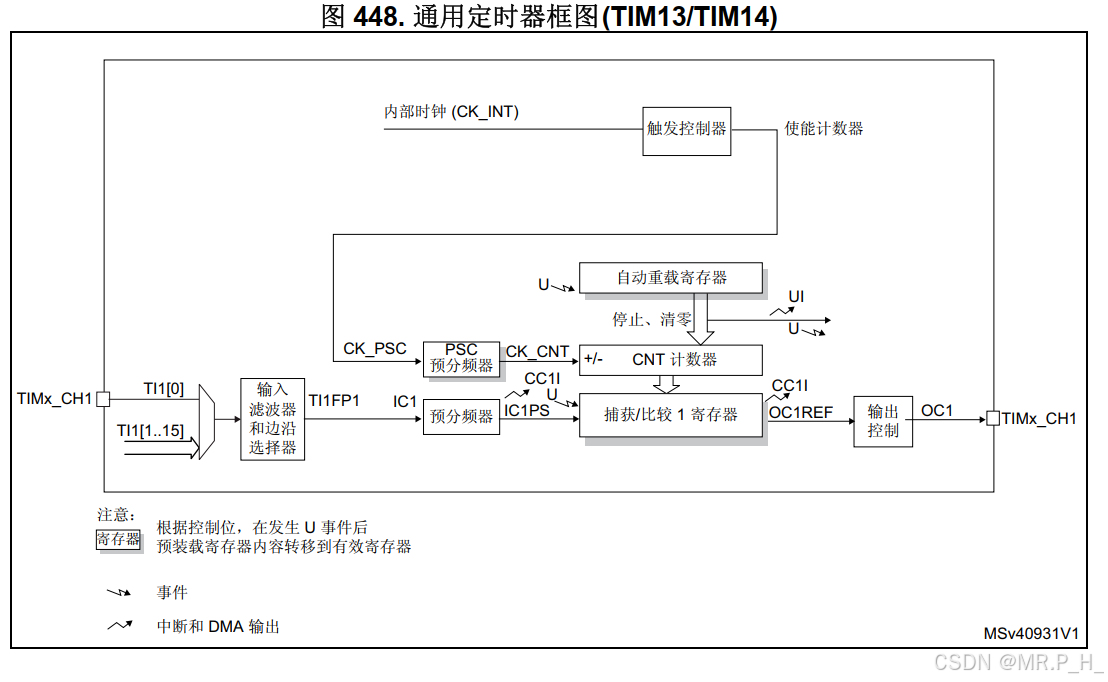
可以看到TIM12作为TIM13的从定时器,内部触发选择ITR2,原理和上文的F407相似,不在过多解释!
讲一下cubemx的配置!
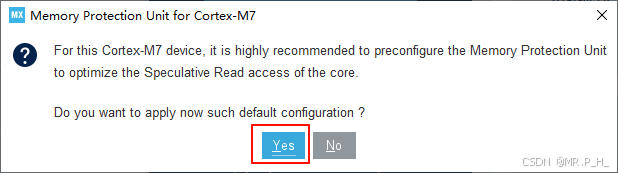
先配好一些基本的初始化,如debug口,RCC,时钟树,主要还是配置定时器12和定时器13!
选择H7芯片生成工程
选择RCC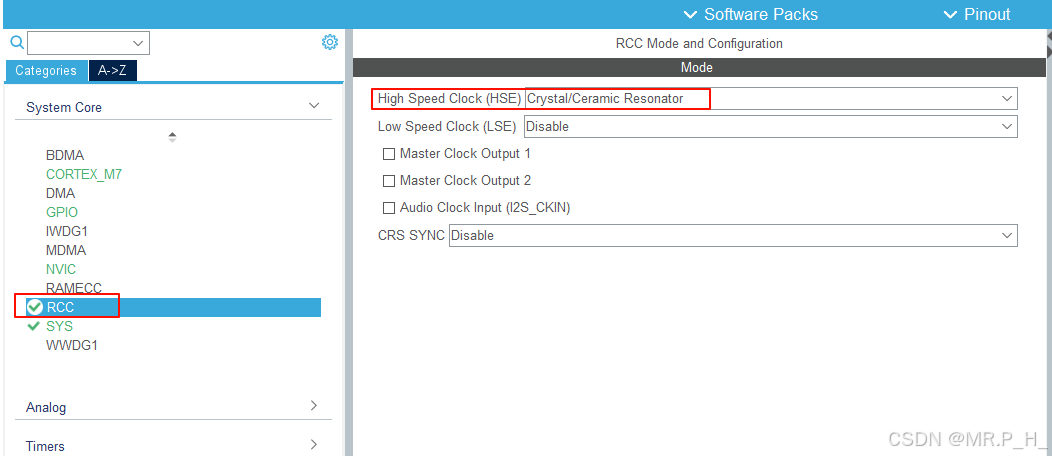
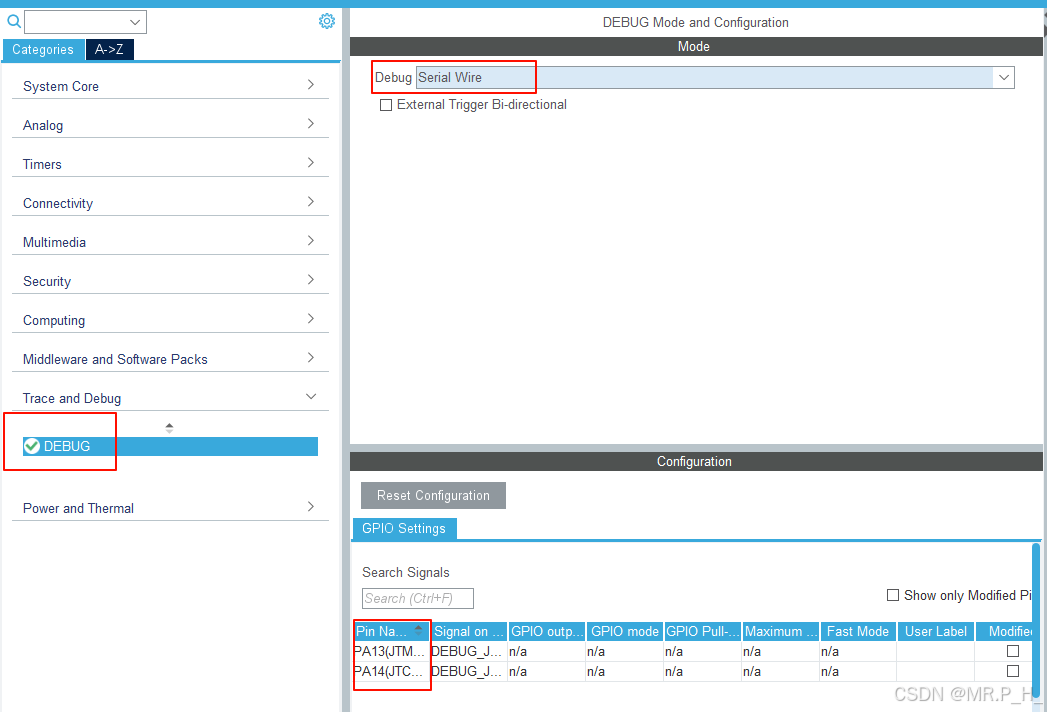
选择debug接口
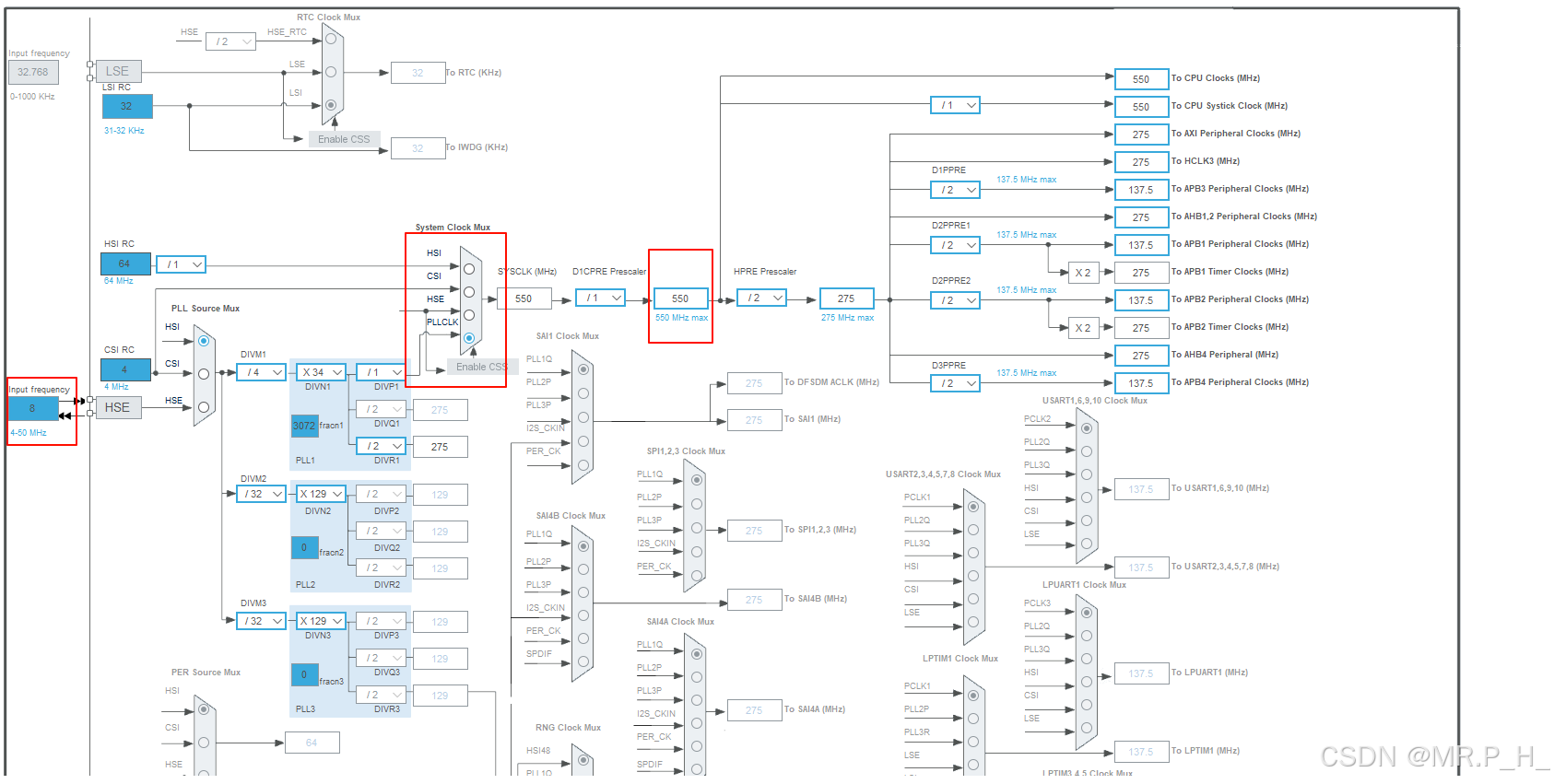
值得注意的是STM32H723的主频为550MHZ,定时器最大频率为275MHZ,我使用的是外部8MHZ的晶振进行倍频!输入550后软件会自动匹配!
定时器13的配置
TIM12的配置
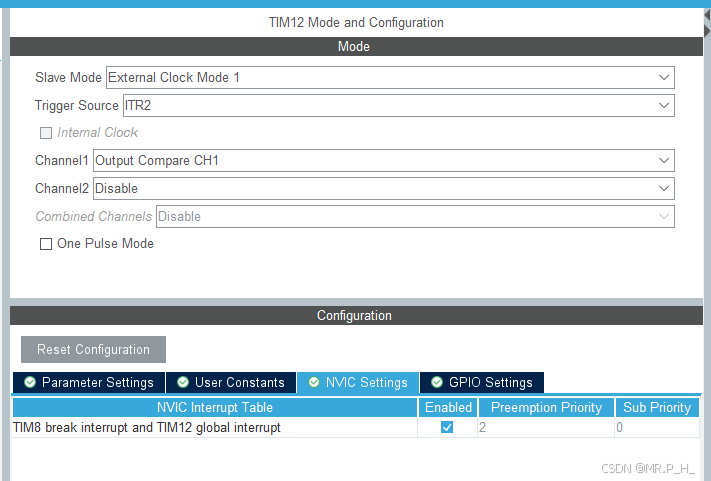
开启定时器12的中断
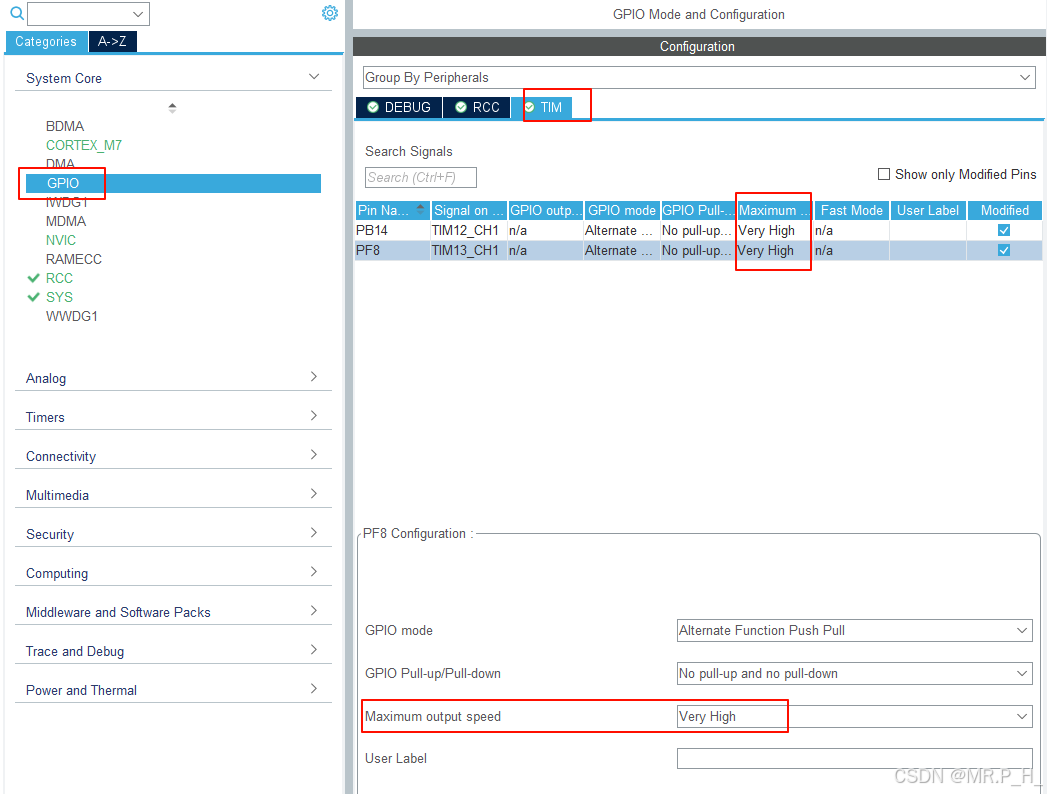
再配置一下TIM的GPIO引脚(这里用于控制方向的引脚忘记配置了)
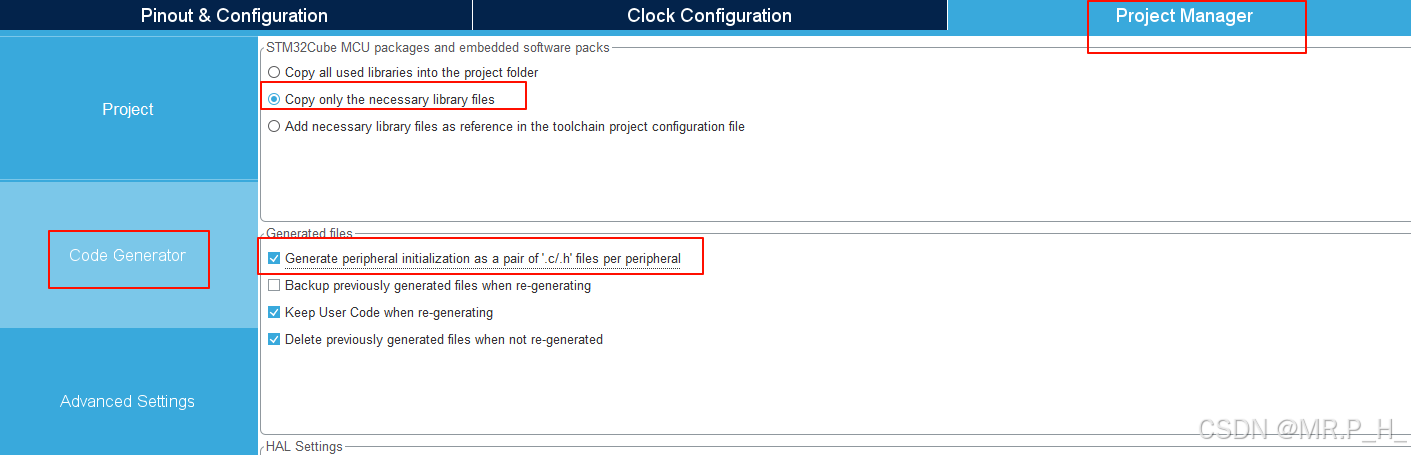
配置完成后生成工程,打开!
新建一个hardware文件夹
打开工程,添加路径!
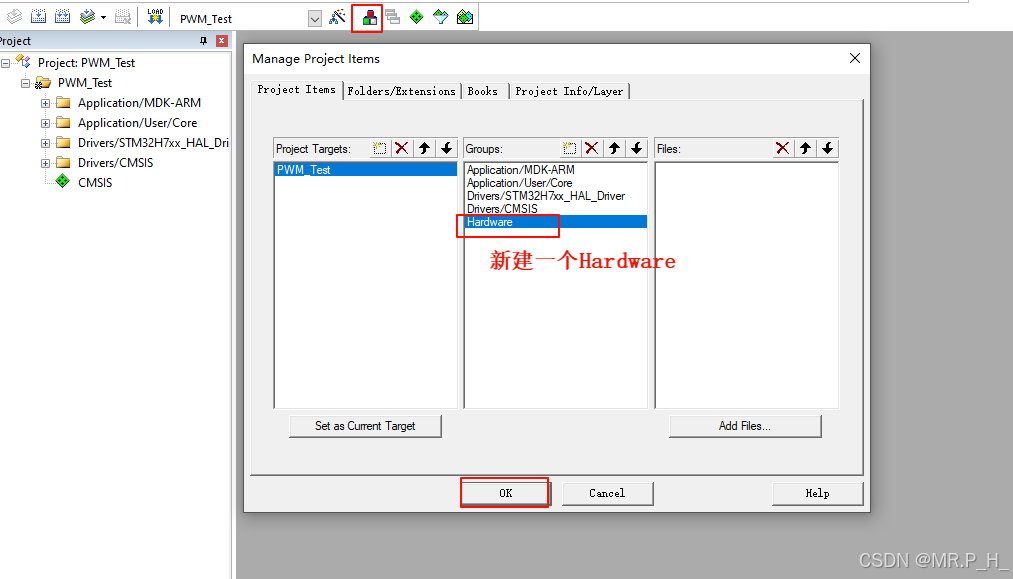
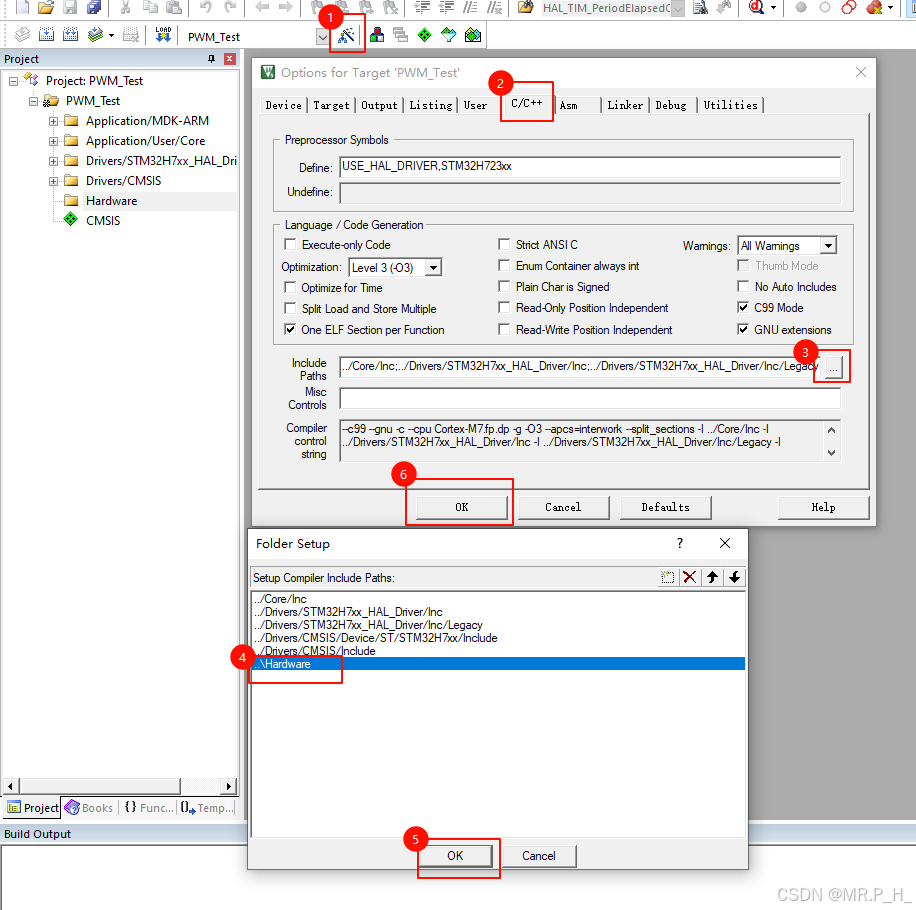
新建pwm.c和pwm.h文件,并添加到Hardware文件夹路径下!

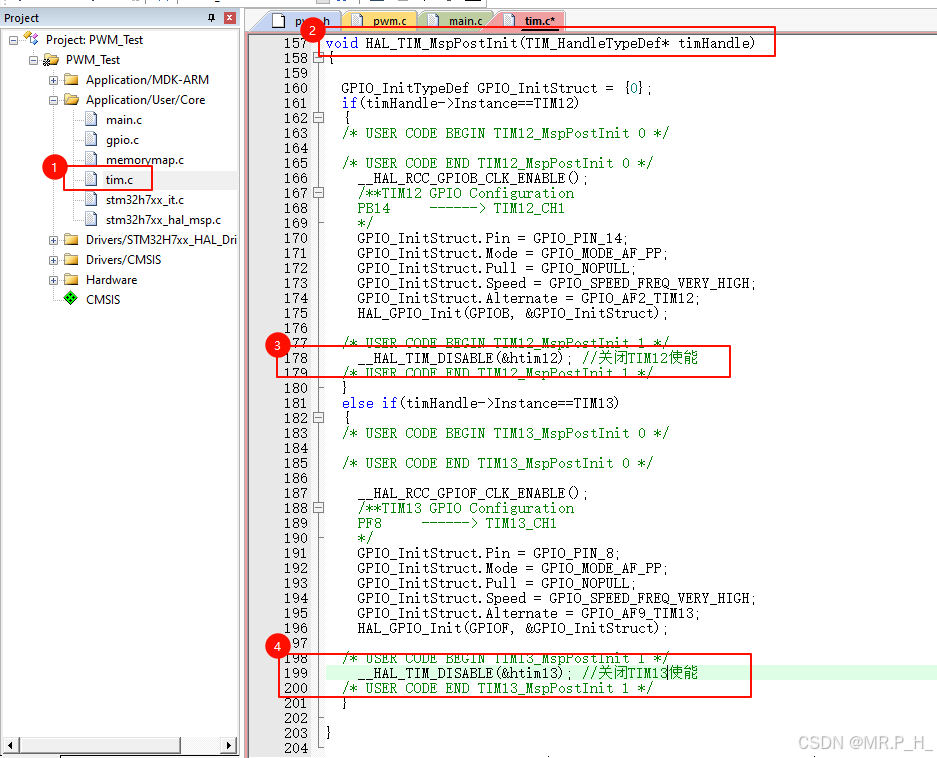
修改代码,将定时器tim.c中的初始化HAL_TIM_MspPostInit中添加__HAL_TIM_DISABLE()函数先关闭使能!
添加的pwm.c内容如下!
#include "pwm.h"
extern uint16_t Motor_En;
/**
uint16_t Num 发送的脉冲数(从定时器的ARR值)
uint8_t Dir 步进电机的旋转方向
uint16_t Speed 速度(更改主定时器的ARR值)
*/
void PWM_Output_Speed(uint16_t Num,uint8_t Dir,uint16_t Speed)
{
uint16_t DutyCycle=Speed/2;
//HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, ((Dir == 1) ? GPIO_PIN_RESET : GPIO_PIN_SET));
__HAL_TIM_DISABLE(&htim12); //关闭TIM12使能
__HAL_TIM_SET_AUTORELOAD(&htim12, Num); //从新设置ARR计数值
HAL_TIM_GenerateEvent(&htim12, TIM_EVENTSOURCE_UPDATE); //配置由软件生成定时器事件,新修改ARR计数值后,马上软件更改一次事件
__HAL_TIM_ENABLE(&htim12); //使能 TIM12
__HAL_TIM_CLEAR_IT(&htim12, TIM_IT_UPDATE); //清楚中断标志位
__HAL_TIM_ENABLE_IT(&htim12, TIM_IT_UPDATE); //开启定时器12的中断
__HAL_TIM_DISABLE(&htim13);
__HAL_TIM_SET_AUTORELOAD(&htim13, Speed); //从新设置ARR计数值
HAL_TIM_GenerateEvent(&htim13, TIM_EVENTSOURCE_UPDATE); //配置由软件生成定时器事件,新修改ARR计数值后,马上软件更改一次事件
(&htim13)->Instance->CCR1 = DutyCycle;//设置CCR的值为ARR的一半,占空比为50%
HAL_TIM_GenerateEvent(&htim13, TIM_EVENTSOURCE_CC1); //配置后由软件生成通道一的事件,马上生效
__HAL_TIM_ENABLE(&htim13); //TIM_Cmd(TIM14, ENABLE); //使能 TIM14
HAL_TIM_PWM_Start(&htim13,TIM_CHANNEL_1);
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM12)
{
if(__HAL_TIM_GET_IT_SOURCE(&htim12,TIM_IT_UPDATE) != RESET)
{
//__HAL_TIM_CLEAR_IT(&htim12, TIM_IT_UPDATE);
__HAL_TIM_DISABLE(&htim12); //关闭TIM12使能
__HAL_TIM_DISABLE(&htim13); //关闭TIM14使能
HAL_TIM_PWM_Stop(&htim13,TIM_CHANNEL_1);
Motor_En=0;
//__HAL_TIM_DISABLE_IT(&htim12, TIM_IT_UPDATE); //关闭定时器12的中断
}
}
}
HAL_TIM_PeriodElapsedCallback函数是TIM中断TIM8_BRK_TIM12_IRQHandler的回调函数,进入中断后会进入此函数!在此函数中进行处理!
pwm.h
#ifndef _PWM_H_
#define _PWM_H_
#include "main.h"
#include "tim.h"
#include "gpio.h"
void PWM_Output_Speed(uint16_t Num,uint8_t Dir,uint16_t Speed);
#endif
在main中调用
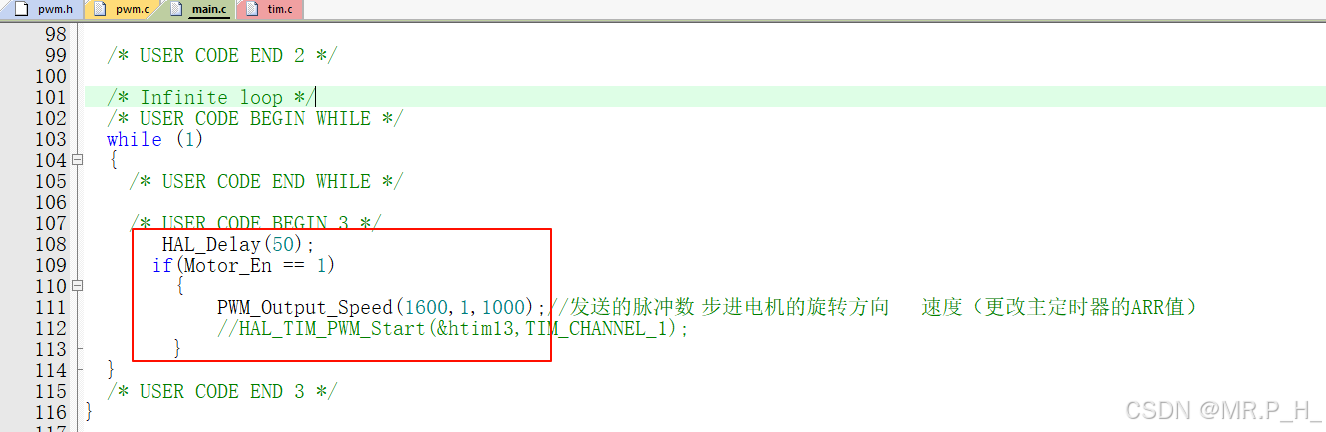
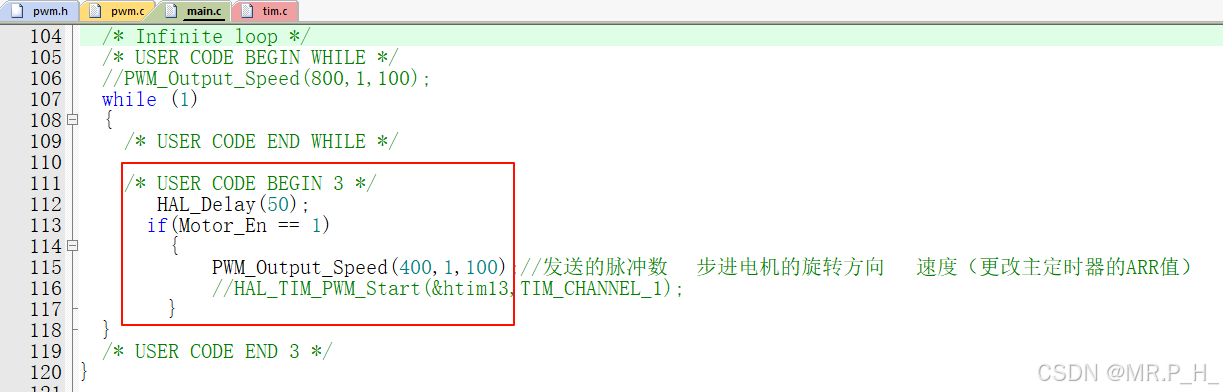
编译仿真运行!PF8引脚输出PWM,验证一下!可以!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 16
16 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)