谱聚类(spectral clustering)及其实现详解
Preface开了很多题,手稿都是写好一直思考如何放到CSDN上来,一方面由于公司技术隐私,一方面由于面向对象不同,要大改,所以一直没贴出完整,希望日后可以把开的题都补充全。谱聚类从构造规则化的拉普拉斯矩阵,到对特征矩阵的聚类,个中原理虽然简洁明了,但却蕴含了强大的逻辑结构。
Preface
开了很多题,手稿都是写好一直思考如何放到CSDN上来,一方面由于公司技术隐私,一方面由于面向对象不同,要大改,所以一直没贴出完整,希望日后可以把开的题都补充全。
先把大纲列出来:
一、从狄多公主圈地传说说起
二、谱聚类的演算
(一)、演算
1、谱聚类的概览
2、谱聚类构图
3、谱聚类切图
(1)、RatioCut
(2)、Ncut
(3)、一点题外话
(二)、pseudo-code
三、谱聚类的实现(scala)
(一)、Similarity Matrix
(二)、kNN/mutual kNN
(三)、Laplacian Matrix
(四)、Normalized
(五)、Eigenvector(Jacobi methond)
(六)、kmeans/GMM
四、一些参考文献
一、从狄多公主圈地传说说起
谱聚类(spectral clustering)的思想最早可以追溯到一个古老的希腊传说,话说当时有一个公主,由于其父王去世后,长兄上位,想独揽大权,便杀害了她的丈夫,而为逃命,公主来到了一个部落,想与当地的酋长买一块地,于是将身上的金银财宝与酋长换了一块牛皮,且与酋长约定只要这块牛皮所占之地即可。聪明的酋长觉得这买卖可行,于是乎便答应了。殊不知,公主把牛皮撕成一条条,沿着海岸线,足足围出了一个城市。
故事到这里就结束了,但是我们要说的才刚刚开始,狄多公主圈地传说,是目前知道的最早涉及Isoperimetric problem(等周长问题)的,具体为如何在给定长度的线条下围出一个最大的面积,也可理解为,在给定面积下如何使用更短的线条,而这,也正是谱图聚类想法的端倪,如何在给定一张图,拿出“更短”的边来将其“更好”地切分。而这个“更短”的边,正是对应了spectral clustering中的极小化问题,“更好”地切分,则是对应了spectral clustering中的簇聚类效果。
谱聚类最早于1973年被提出,当时Donath 和 Hoffman第一次提出利用特征向量来解决谱聚类中的f向量选取问题,而同年,Fieder发现利用倒数第二小的特征向量,显然更加符合f向量的选取,同比之下,Fieder当时发表的东西更受大家认可,因为其很好地解决了谱聚类极小化问题里的NP-hard问题,这是不可估量的成就,虽然后来有研究发现,这种方法带来的误差,也是无法估量的,下图是Fielder老爷子,于去年15年离世,缅怀。 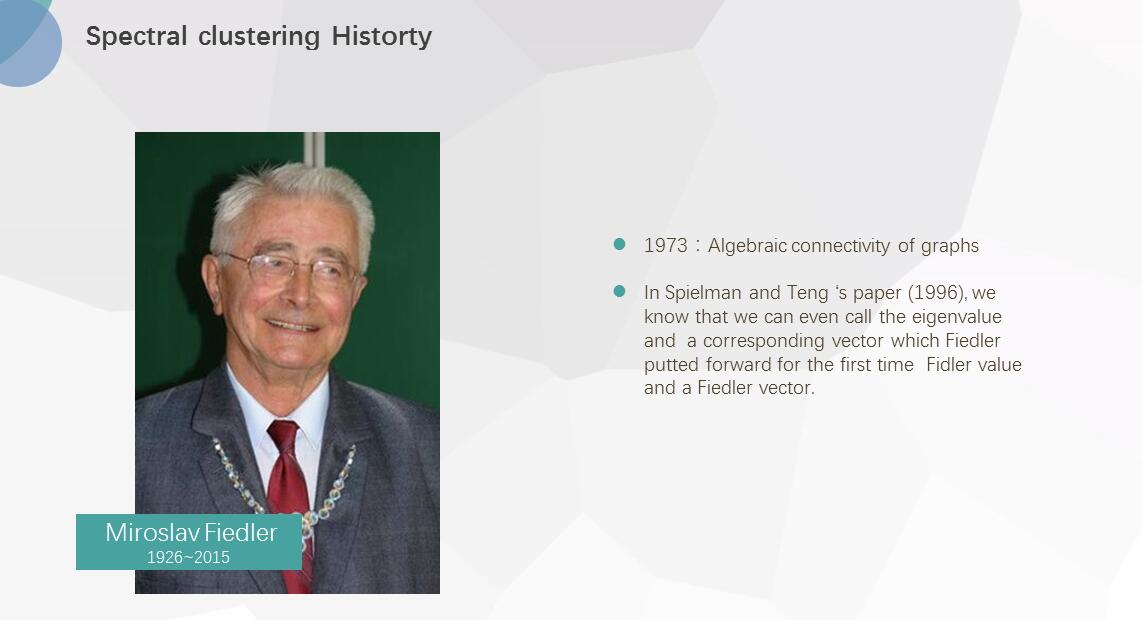
二、谱聚类的演算
(一)、演算
1、谱聚类概览
谱聚类演化于图论,后由于其表现出优秀的性能被广泛应用于聚类中,对比其他无监督聚类(如kmeans),spectral clustering的优点主要有以下:
1.过程对数据结构并没有太多的假设要求,如kmeans则要求数据为凸集。
2.可以通过构造稀疏similarity graph,使得对于更大的数据集表现出明显优于其他算法的计算速度。
3.由于spectral clustering是对图切割处理,不会存在像kmesns聚类时将离散的小簇聚合在一起的情况。
4.无需像GMM一样对数据的概率分布做假设。
同样,spectral clustering也有自己的缺点,主要存在于构图步骤,有如下:
1.对于选择不同的similarity graph比较敏感(如 epsilon-neighborhood, k-nearest neighborhood,fully connected等)。
2.对于参数的选择也比较敏感(如 epsilon-neighborhood的epsilon,k-nearest neighborhood的k,fully connected的 )。
谱聚类过程主要有两步,第一步是构图,将采样点数据构造成一张网图,表示为G(V,E),V表示图中的点,E表示点与点之间的边,如下图:
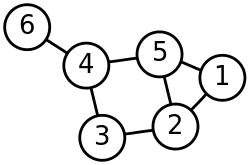
图1 谱聚类构图(来源wiki)
第二步是切图,即将第一步构造出来的按照一定的切边准则,切分成不同的图,而不同的子图,即我们对应的聚类结果,举例如下:
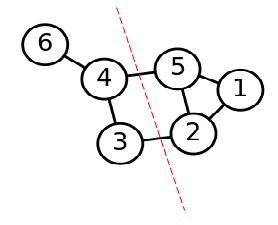
图2 谱聚类切图
初看似乎并不难,但是…,下面详细说明推导。
2、谱聚类构图
在构图中,一般有三种构图方式:
1. ε <script type="math/tex" id="MathJax-Element-1">\varepsilon </script>-neighborhood
2. k-nearest neighborhood
3. fully connected
前两种可以构造出稀疏矩阵,适合大样本的项目,第三种则相反,在大样本中其迭代速度会受到影响制约,在讲解三种构图方式前,需要引入similarity function,即计算两个样本点的距离,一般用欧氏距离: si,j=∥∥xi−xj∥∥2 <script type="math/tex" id="MathJax-Element-2">s_{i,j} = \left \| x_{i}-x_{j} \right \| ^{2} </script>, si,j <script type="math/tex" id="MathJax-Element-3">s_{i,j}</script>表示样本点 xi <script type="math/tex" id="MathJax-Element-4">x_{i}</script>与 xj <script type="math/tex" id="MathJax-Element-5">x_{j}</script>的距离,或者使用高斯距离 si,j=e−∥∥xi−xj∥∥22σ2 <script type="math/tex" id="MathJax-Element-6">s_{i,j}=e^{\frac{-\left \| x_{i}-x_{j} \right \|^{2}}{2\sigma ^{2}}}</script>,其中 σ <script type="math/tex" id="MathJax-Element-7">\sigma</script> 的选取也是对结果有一定影响,其表示为数据分布的分散程度,通过上述两种方式之一即可初步构造矩阵 S:Si,j=[s]i,j <script type="math/tex" id="MathJax-Element-8">S:S_{i,j}=[s]_{i,j}</script>,一般称 为Similarity matrix(相似矩阵)。
对于第一种构图 ε <script type="math/tex" id="MathJax-Element-9">\varepsilon</script> -neighborhood,顾名思义是取 si,j≤ε <script type="math/tex" id="MathJax-Element-10">s_{i,j}\leq \varepsilon</script>的点,则相似矩阵 S <script type="math/tex" id="MathJax-Element-11">S</script>可以进一步重构为邻接矩阵(adjacency matrix)
可以看出,在 ε <script type="math/tex" id="MathJax-Element-14">\varepsilon</script>-neighborhood重构下,样本点之间的权重没有包含更多的信息了。
对于第二种构图k-nearest neighborhood,其利用KNN算法,遍历所有的样本点,取每个样本最近的k个点作为近邻,但是这种方法会造成重构之后的邻接矩阵 W <script type="math/tex" id="MathJax-Element-15">W</script>非对称,为克服这种问题,一般采取下面两种方法之一:
一是只要点
二是必须满足点 在 的K个近邻中且 在 的K个近邻中,才会保留 si,j <script type="math/tex" id="MathJax-Element-23">s_{i,j}</script>并做进一步变换,此时 W <script type="math/tex" id="MathJax-Element-24">W</script>为:
对于第三种构图fully connected,一般使用高斯距离: si,j=e−∥∥xi−xj∥∥22σ2 <script type="math/tex" id="MathJax-Element-26">s_{i,j}=e^{\frac{-\left \| x_{i}-x_{j} \right \|^{2}}{2\sigma ^{2}}}</script>,则重构之后的矩阵 W <script type="math/tex" id="MathJax-Element-27">W</script>与之前的相似矩阵
在了解三种构图方式后,还需要注意一些细节,对于第一二中构图,一般是重构基于欧氏距离的 ,而第三种构图方式,则是基于高斯距离的 ,注意到高斯距离的计算蕴含了这样一个情况:对于 ∥∥xi−xj∥∥2 <script type="math/tex" id="MathJax-Element-30">\left \| x_{i}-x_{j} \right \|^{2}</script>比较大的样本点,其得到的高斯距离反而值是比较小的,而这也正是 S <script type="math/tex" id="MathJax-Element-31">S</script>可以直接作为
得到邻接矩阵 W <script type="math/tex" id="MathJax-Element-33">W</script>后,需要做进一步的处理:
(1).计算阶矩(degree matrix)
其中其中 wi,j <script type="math/tex" id="MathJax-Element-36">w_{i,j}</script>为邻接矩阵 W <script type="math/tex" id="MathJax-Element-37">W</script>元素,
(2).计算拉普拉斯矩阵(Laplacians matrix)
如此,在构图阶段基本就完成了,至于为什么要计算出拉普拉斯矩阵 L <script type="math/tex" id="MathJax-Element-42">L</script>,可以说
3、谱聚类切图
谱聚类切图存在两种主流的方式:RatioCut和Ncut,目的是找到一条权重最小,又能平衡切出子图大小的边,下面详细说明这两种切法。
在讲解RatioCut和Ncut之前,有必要说明一下问题背景和一些概念,假设V为所有样本点的集合,
其中 Ai¯ <script type="math/tex" id="MathJax-Element-48">\bar{A_{i}}</script>为 Ai <script type="math/tex" id="MathJax-Element-49">A_{i}</script>的补集,意为除 Ai <script type="math/tex" id="MathJax-Element-50">A_{i}</script>子集外其他V的子集的并集, W(Ai,Ai¯) <script type="math/tex" id="MathJax-Element-51">W(A_{i},\bar{A_{i}})</script>为 Ai <script type="math/tex" id="MathJax-Element-52">A_{i}</script>与其他子集的连边的和,为:
其中 wm,n <script type="math/tex" id="MathJax-Element-54">w_{m,n}</script>为邻接矩阵W中的元素。
由于我们切图的目的是使得每个子图内部结构相似,这个相似表现为连边的权重平均都较大,且互相连接,而每个子图间则尽量没有边相连,或者连边的权重很低,那么我们的目的可以表述为:
但是稍微留意可以发现,这种极小化的切图存在问题,如下图:
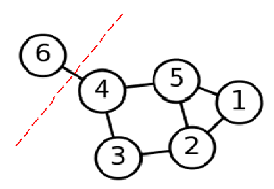
图3 问题切图
如上图,如果用 mincut(A1,A2,⋯,Ak) <script type="math/tex" id="MathJax-Element-56">min\quad cut(A_{1},A_{2},\cdots,A_{k})</script>这种方法切图,会造成将V切成很多个单点离散的图,显然这样是最快且最能满足那个最小化操作的,但这明显不是想要的结果,所以有了RatioCut和Ncut,具体地:
其中 |Ai| <script type="math/tex" id="MathJax-Element-59">\left | A_{i} \right |</script> 为 Ai <script type="math/tex" id="MathJax-Element-60">A_{i}</script>中点的个数, vol(Ai) <script type="math/tex" id="MathJax-Element-61">vol(A_{i})</script>为 Ai <script type="math/tex" id="MathJax-Element-62">A_{i}</script>中所有边的权重和。
下面详细讲解这两种方法的计算:Ratiocut & Ncut
(1).Ratiocut
Ratiocut切图考虑了目标子图的大小,避免了单个样本点作为一个簇的情况发生,平衡了各个子图的大小。Ratiocut的目标同样是极小化各子图连边和,如下:
对上述极小化问题做一下转化,引入 {A1,A2,⋯,Ak} <script type="math/tex" id="MathJax-Element-64">\{A_{1},A_{2},\cdots ,A_{k}\}</script>的指示向量 hj={h1,h2,⋯,hi,⋯,hk},j=1,2,⋯,k <script type="math/tex" id="MathJax-Element-65">h_{j}=\{h_{1},h_{2},\cdots,h_{i},\cdots ,h_{k}\},\quad j=1,2,\cdots,k</script>. 其中i表示样本下标,j表示子集下标, 表示样本i对子集j的指示,具体为:
通俗理解就是,每个子集 Aj <script type="math/tex" id="MathJax-Element-67">A_{j}</script>对应一个指示向量 hj <script type="math/tex" id="MathJax-Element-68">h_{j}</script>,而每个 hj <script type="math/tex" id="MathJax-Element-69">h_{j}</script>里有N个元素,分别代表N个样本点的指示结果,如果在原始数据中第i个样本被分割到子集 Aj <script type="math/tex" id="MathJax-Element-70">A_{j}</script>里,则 hj <script type="math/tex" id="MathJax-Element-71">h_{j}</script>的第i个元素为 1∣∣Aj∣∣√ <script type="math/tex" id="MathJax-Element-72">\frac{1}{\sqrt{\left | A_{j} \right |}}</script>,否则为0。
进一步,计算 ,可以得到:
上述过程稍微复杂,分解如下:
第一步,第二步转化,利用上文拉普拉斯矩阵定义L=D-W;
第三步,m,n分别表示第m,n个样本,其最大值均为N,D/W均为对称矩阵,此步主要将矩阵内积离散化为元素连加求和形式;
第四步,由于D为对角矩阵,所以只有对角线上元素与向量 hi <script type="math/tex" id="MathJax-Element-74">h_{i}</script>相乘有意义;
第五步,代数变换。
进一步地,做如下:
同样分解如下:
第一步到第二步,由上文阶矩的定义可知,其对角线上元素 Dm,m=∑n=1wm,n <script type="math/tex" id="MathJax-Element-76">D_{m,m}=\sum_{n=1}w_{m,n}</script>
第二部到第三步,二次函数变换;
进一步,将上文 hj,i <script type="math/tex" id="MathJax-Element-77">h_{j,i}</script>代入上式,最终可以得到:
分解如下:
第一步到第二步,将指示变量 hi,m <script type="math/tex" id="MathJax-Element-79">h_{i,m}</script>, hi,n <script type="math/tex" id="MathJax-Element-80">h_{i,n}</script>对应 Ai <script type="math/tex" id="MathJax-Element-81">A_{i}</script>的元素分别代入;
第三,四,五步,分别做简单运算,以及将 ∑m∈Ai,n∈Ai¯wm,n <script type="math/tex" id="MathJax-Element-82">\sum_{m\in A_{i},n \in \bar{A_{i}}}w_{m,n}</script>替换为 cut(Ai,Ai¯) <script type="math/tex" id="MathJax-Element-83">cut(A_{i},\bar{A_{i}})</script>;
可以看到,通过引入指示变量h,将L矩阵放缩到与Ratiocut等价,这无疑是在谱聚类中划时代的一举。
为了更进一步考虑进所有的指示向量,令 H={h1,h2,⋯,hk} <script type="math/tex" id="MathJax-Element-84">H=\{h_{1},h_{2},\cdots ,h_{k}\}</script>,其中 hi <script type="math/tex" id="MathJax-Element-85">h_{i}</script>按列排列,由 hi <script type="math/tex" id="MathJax-Element-86">h_{i}</script>的定义知每个 hi <script type="math/tex" id="MathJax-Element-87">h_{i}</script>之间都是相互正交,即 hi∗hj=0,i≠j <script type="math/tex" id="MathJax-Element-88">h_{i}*h_{j}=0,i \neq j</script>,且有 hi∗hi=1 <script type="math/tex" id="MathJax-Element-89">h_{i}*h_{i}=1</script>,可得到:
Tr表示对角线求和。
如此,便将极小化问题: minRatiocut(A1,A2,⋯,Ak) <script type="math/tex" id="MathJax-Element-91">min\quad Ratiocut(A_{1},A_{2},\cdots,A_{k})</script>,转化为:
将之前切图的思路以一种严谨的数学表达表示出来,对于上面极小化问题,由于L矩阵是容易得到的,所以目标是求满足条件的H矩阵,以使得 Tr(HTLH) <script type="math/tex" id="MathJax-Element-93">Tr(H^{T}LH)</script>最小。
注意到一点,要求条件下的H,首先是求得组成H的每个 hi <script type="math/tex" id="MathJax-Element-94">h_{i}</script>,而每个 hi <script type="math/tex" id="MathJax-Element-95">h_{i}</script>都是Nx1的向量,且向量中每个值都是二值分布,即取值0或者 1/|Ai|−−−√ <script type="math/tex" id="MathJax-Element-96">1/\sqrt{\left | A_{i} \right |}</script>,那么对于每个元素,有2种选择,则当个 hi <script type="math/tex" id="MathJax-Element-97">h_{i}</script>就有 2N <script type="math/tex" id="MathJax-Element-98">2^{N}</script>种情况,对于整个H矩阵,则有 (C1k)N <script type="math/tex" id="MathJax-Element-99">(C_{k}^{1})^{N}</script>种情况,对于N很大的数据,这无疑是灾难性的NP-hard问题,显然我们不可能遍历所有的情况来求解,那么问题是不是没有解?答案自然是否定的,虽然我们没办法求出精确的 ,但是我们可以用另外一种方法近似代替 hi <script type="math/tex" id="MathJax-Element-100">h_{i}</script>,而这就是文章开头Fielder提出来的,当k=2的时候,可以用L的倒数第二小的特征向量(因为最小的特征向量为1,其对应的特征值为0,不适合用来求解)来代替 ,关于具体为什么可以这么做,可以参考Rayleigh-Ritz method(对应论文为:A short theory of the Rayleigh-Ritz method),因为涉及泛函变分,这里就不多说了。
那么当k取任意数字时,只需取L矩阵对应的最小那k个(毕竟倒数第二小只有1个),即可组成目标H,最后,对H做标准化处理,如下:
现在H矩阵也完成了,剩下的就是对样本聚类了,要明白我们的目标不是求 Tr(HTLH) <script type="math/tex" id="MathJax-Element-102"> Tr(H^{T}LH)</script>的最小值是多少,而是求能最小化 Tr(HTLH) <script type="math/tex" id="MathJax-Element-103"> Tr(H^{T}LH)</script>的H,所以聚类的时候,分别对H中的行进行聚类即可,通常是kmeans,也可以是GMM,具体看效果而定。
至于为什么是对H的行进行聚类,有两点原因:
1.注意到H除了是能满足极小化条件的解,还是L的特征向量,也可以理解为W的特征向量,而W则是我们构造出的图,对该图的特征向量做聚类,一方面聚类时不会丢失原图太多信息,另一方面是降维加快计算速度,而且容易发现图背后的模式。
2.由于之前定义的指示向量 hi <script type="math/tex" id="MathJax-Element-104">h_{i}</script>是二值分布,但是由于NP-hard问题的存在导致 hi <script type="math/tex" id="MathJax-Element-105">h_{i}</script>无法显式求解,只能利用特征向量进行近似逼近,但是特征向量是取任意值,结果是我们对 hi <script type="math/tex" id="MathJax-Element-106">h_{i}</script>的二值分布限制进行放松,但这样一来 hi <script type="math/tex" id="MathJax-Element-107">h_{i}</script>如何指示各样本的所属情况?所以kmeans就登场了,利用kmeans对该向量进行聚类,如果是k=2的情况,那么kmeans结果就与之前二值分布的想法相同了,所以kmeans的意义在此,k等于任意数值的情况做进一步类推即可。
以上是Ratiocut的内容。
(2).Ncut
Ncut切法实际上与Ratiocut相似,但Ncut把Ratiocut的分母 |Ai| <script type="math/tex" id="MathJax-Element-108">|A_{i}|</script>换成 vol(Ai) <script type="math/tex" id="MathJax-Element-109">vol(A_{i})</script> ,这种改变与之而来的,是L的normalized,这种特殊称谓会在下文说明,而且这种normalized,使得Ncut对于spectral clustering来说,其实更好,下文会说明。
同样,Ncut的目标,也是极小化各子图连边的和,如下:
下面对该问题做一下转化,先引入 {A1,A2,⋯,Ak} <script type="math/tex" id="MathJax-Element-111">\{A_{1},A_{2},\cdots ,A_{k}\}</script>的指示变量 hj={h1,h2,⋯,hi,⋯,hk},j=1,2,⋯,k <script type="math/tex" id="MathJax-Element-112">h_{j}=\{h_{1},h_{2},\cdots,h_{i},\cdots ,h_{k}\},\quad j=1,2,\cdots,k</script>,同样,其中i表示样本下标,j表示子集下标, hj,i <script type="math/tex" id="MathJax-Element-113">h_{j,i}</script>表示样本i对子集j的指示,不同的是,其具体为:
如果在原始数据中第i个样本被分割到子集 Aj <script type="math/tex" id="MathJax-Element-115">A_{j}</script>里,则 hj <script type="math/tex" id="MathJax-Element-116">h_{j}</script>的第i个元素为 1/vol(Ai)−−−−−−√ <script type="math/tex" id="MathJax-Element-117">1/\sqrt{vol(A_{i})}</script>,否则为0。
进一步,计算 hTiLhi <script type="math/tex" id="MathJax-Element-118">h_{i}^{T}Lh_{i} </script>,可以得到:
由于推导与上文类似,这里就综合在一起,主要是为了说明 hTiLhi <script type="math/tex" id="MathJax-Element-120">h_{i}^{T}Lh_{i}</script>如何得到 Ncut(Ai,Ai¯) <script type="math/tex" id="MathJax-Element-121">Ncut(A_{i},\bar{A_{i}})</script>,以便将 minNcut(A1,A2,⋯,Ak) <script type="math/tex" id="MathJax-Element-122">min\quad Ncut(A_{1},A_{2},\cdots,A_{k})</script>用严谨数学式子进行表达。
这里对上述一大串式子分解一下:
第一,二,三步,做一些简单的变换,如L=D-W代入,将向量内积转换成连加形式,同样,D是对角矩阵,可省去一些项;
第四,五,六步,主要是做二次函数变换;
第七步,将 hi,m <script type="math/tex" id="MathJax-Element-123">h_{i,m}</script>, hi,n <script type="math/tex" id="MathJax-Element-124">h_{i,n}</script>对应 Ai <script type="math/tex" id="MathJax-Element-125">A_{i}</script>的元素分别代入;
第八,九步,得到 Ncut(Ai,Ai¯) <script type="math/tex" id="MathJax-Element-126">Ncut(A_{i},\bar{A_{i}})</script> 形式;
此外,相比与Ratiocut,Ncut特有的一点性质是: hTiDhi=1 <script type="math/tex" id="MathJax-Element-127"> h_{i}^{T}Dh_{i}=1</script>,具体如下:
进一步,令 H={h1,h2,⋯,hk} <script type="math/tex" id="MathJax-Element-129">H=\{h_{1},h_{2},\cdots ,h_{k}\}</script>,则 HTDH=I <script type="math/tex" id="MathJax-Element-130">H^{T}DH=I</script> ,其中I为单位对角矩阵。
同样,可以得到:
如此,便将极小化问题: minNcut(A1,A2,⋯,Ak) <script type="math/tex" id="MathJax-Element-132">min\quad Ncut(A_{1},A_{2},\cdots,A_{k})</script>,转化为:
除了H的限制条件,Ncut的极小化与Ratiocut的极小化基本无差异,但是就是这微小的条件,使得Ncut实质上是对L做了normalize(不得不叹数学真是十分奇妙)。
下面进一步说明,令 H=D−1/2F <script type="math/tex" id="MathJax-Element-134">H=D^{-1/2}F</script>, D−1/2 <script type="math/tex" id="MathJax-Element-135">D^{-1/2}</script>意为对D对角线上元素开方再求逆。将 H=D−1/2F <script type="math/tex" id="MathJax-Element-136">H=D^{-1/2}F</script>代入 argminHTr(HTLH),s.t.HTDH=I <script type="math/tex" id="MathJax-Element-137"> arg\mathop{min}\limits_{H} \quad Tr(H^{T}LH), \quad s.t. H^{T}DH=I</script>,可以得到:
以及:
至此,目标操作 argminHTr(HTLH),s.t.HTDH=I <script type="math/tex" id="MathJax-Element-140"> arg\mathop{min}\limits_{H} \quad Tr(H^{T}LH), \quad s.t. H^{T}DH=I</script>可以修改为:
其中, D−1/2LD−1/2 <script type="math/tex" id="MathJax-Element-142">D^{-1/2}LD^{-1/2}</script>这一步操作,就是对L矩阵进行normalize,而normalize可以理解为标准化,具体为: Li,jvol(Ai)vol(Aj)√ <script type="math/tex" id="MathJax-Element-143">\frac{L_{i,j}}{\sqrt{vol( A_{i})vol(A_{j})}}</script> ,这么做的一个好处就是对L中的元素进行标准化处理使得不同元素的量纲得到归一,具体理解就是,同个子集里,不同样本点之间的连边可能大小比较相似,这点没问题,但是对于不同子集,样本点之间的连边大小可能会差异很大,做 这一步normalize操作,可以将L中的元素归一化在[-1,1]之间,这样量纲一致,对算法迭代速度,结果的精度都是有很大提升。
最后,F矩阵的求解可通过求 D−1/2LD−1/2 <script type="math/tex" id="MathJax-Element-144">D^{-1/2}LD^{-1/2}</script>的前k个特征向量组成,然后对F再做进一步的标准化:
之后再对F的行进行kmeans或GMM聚类即可。
以上是Ncut的内容。
(3).一点题外话
写到这里,如果只是应用spectral clustering,则此部分可以忽略,直接看下文pseudo-code部分即可,但是对于喜欢深入探究,不妨看一看。
值得一提的是,从概率的视角出发,与上文推导也是不谋而合,而且得到的结论,与Ncut更是异曲同工。这种概率视角在多数论文里,称之为随机游走(Random walks),在随机数学里,常见于马尔可夫模型。这部分的详细出处可以参考Lovaszl(1993: Random Walks on Graphs: A Survey),以及Meila & Shi (2001:A Random Walks Views of Spectral Segmentation)。
在随机游走框架下,通常都会构建一个转移概率矩阵(transition matrix),同样,利用上文的邻接矩阵,可以得到该转移概率矩阵P为:
其中 wi,j <script type="math/tex" id="MathJax-Element-147">w_{i,j}</script>, Di,j <script type="math/tex" id="MathJax-Element-148">D_{i,j}</script> 分别为W,D矩阵中的元素。可以看出,其实 P=WD−1 <script type="math/tex" id="MathJax-Element-149">P=WD^{-1}</script>。为方便做进一步论述,假设一个初始分布概率 π=(π1,π2,⋯,πi,⋯,πN)T <script type="math/tex" id="MathJax-Element-150">\pi = (\pi_{1},\pi_{2},\cdots,\pi_{i},\cdots,\pi_{N})^{T}</script>,其中:
对于最简单的双簇聚类,假设将原图V分割成 A1 <script type="math/tex" id="MathJax-Element-152">A_{1}</script>以及 A2 <script type="math/tex" id="MathJax-Element-153">A_{2}</script>,则目标是极小化下面概率:
这种极小化概率的意义在于,样本在不同簇之间切换的可能性,应该尽量低。
那么,对于 P(A1|A2) <script type="math/tex" id="MathJax-Element-155">P(A_{1}|A_{2})</script>,可以写为:
对于 P(A2) <script type="math/tex" id="MathJax-Element-157">P(A_{2})</script>,可以理解为任意样本属于 A2 <script type="math/tex" id="MathJax-Element-158">A_{2}</script>的概率,则:
可通过 A2 <script type="math/tex" id="MathJax-Element-160">A_{2}</script>簇里边和与整张图V边和做对比。
对于 P(A_{1},A_{2}) P(A1,A2) <script type="math/tex" id="MathJax-Element-161">P(A_{1},A_{2})</script>,可以理解为,任取一点,其从 A2 <script type="math/tex" id="MathJax-Element-162">A_{2}</script>切换至 A1 <script type="math/tex" id="MathJax-Element-163">A_{1}</script>的概率,具体为:
则:
最终:
至此,可以看到Ncut在概率的视角上,也有了相应的立足之地,Ratiocut的推导也同理。
(二)、pesudo-code
Spectral clustering的pseudo-code有很多种,这里只讲最常用的normalized版本,也就是Ncut作为切图法的版本。
具体为:
1.构造S矩阵(similarity matrix),同时指定要聚类的簇数k;
2.利用S矩阵构造W矩阵(adjacent matrix);
3.计算拉普拉斯矩阵L,其中L=D-W;
4.对L矩阵标准化,即令 ;
5.计算normalize后的L矩阵的前k个特征向量,按特征值升序排列;
6.对k个向量组成的矩阵的行进行看kmeans/GMM聚类;
7.将聚类结果的各个簇分别打上标记,对应上原数据,输出结果。
input: (data,K,k,kNNType,sigma,epsilon)
1. S = Euclidean(data)
2. W = Gaussian( kNN(S,k,kNNType) , sigma )
3. L = D - W
4. L' = normalized(L)
5. EV = eigenvector(L',K)
6. while( (newCenter - oldCenter) > epsilon){
newCenter = kmeans(EV,K)
}
output:K clusters of SC
其中,data为样本,对应code为二维数组,K为要聚类的簇数,k为kNN的邻接个数,kNNType为SC中的kNN函数类型,一般为kNN/mutalkNN,具体看上文说明,sigma为构造W矩阵时的高斯函数参数,epsilon为kmeans或者GMMs中的更新步长。SC输出为聚出K个簇。
三、谱聚类的实现
实现过程涉及到的一些概念有:Similarity Matrix、kNN/mutual kNN、Laplacian Matrix、Normalized、Eigenvector(Jacobi methond)、kmeans/GMM;下面一一按序解析,使用语言为scala,这里需要说明一点,由于技术保密,这里有些东西只能介绍一些简单的版本,动手操作可以发现,上述计算在小样本还算过得去,样本一大简直无法入目,只能各位自己多去查看论文了,若日后有缘,会开篇做另外的优化阐述。
(一)、Similarity Matrix
// calculate the similarity matrix
def calculateSimilarityMatrix(SCInput: Array[Array[Double]]): Array[Array[Double]] = {
// the Euclidean Distance
def SCEuclideanDistance(SCEDInput: Array[Double]): Array[Double] = {
SCInput.map(_.zip(SCEDInput))
.map(a => a.map(b => math.pow(b._1 - b._2, 2)).sum)
}
SCInput.map(SCEuclideanDistance)
} 这里不代入数据了,直接构造一个similarity Matrix了,如下:
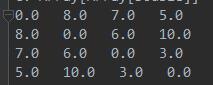
图4 similarity Matrix
(二)、kNN/mutual kNN
下面是对上面similarity matrix一步构造的相似图做调整,将其转化为W(adjacency matrix).
// define the kNN function
def kNN(k: Int, kNNType: String, sigma: Double = 1.0, SMatrix: Array[Array[Double]]): Array[Array[Double]] = {
val len = SMatrix.length
val AdjacencyMatrix = Array.ofDim[Double](len, len)
// define the function of calculating the mutual adjacency matrix (for mutualkNN)
@tailrec
def calculateMutualAdjacencyMatrix(n: Int, S: Array[Array[Double]]): Array[Array[Double]] = {
if (n < len) {
// take out the smallest k values
val kSmallestValue = S(n).zipWithIndex.sortWith((a, b) => a._1 < b._1).take(k + 1)
val indexOfValue = kSmallestValue.map(_._2).distinct
// calculate the Gaussian similarity value
for (i <- indexOfValue) {
val GaussianSimilarity = math.exp(-S(n)(i) / 2 / sigma / sigma)
AdjacencyMatrix(n)(i) = GaussianSimilarity
}
calculateMutualAdjacencyMatrix(n + 1, S)
} else {
// judge mutual or not.
for (i <- 0 until len) {
val notZero = AdjacencyMatrix(i).zipWithIndex.filter(_._1 != 0.0).map(_._2)
for (j <- notZero) if (AdjacencyMatrix(j)(i) == 0.0) AdjacencyMatrix(i)(j) = 0.0
}
AdjacencyMatrix
}
}
// define the function of calculating the mutual adjacency matrix (for kNN)
@tailrec
def calculateAdjacencyMatrix(n: Int, S: Array[Array[Double]]): Array[Array[Double]] = {
if (n < len) {
// take out the smallest k values
val kSmallestValue = S(n).zipWithIndex.sortWith((a, b) => a._1 < b._1).take(k + 1)
val indexOfValue = kSmallestValue.map(_._2).distinct
// calculate the Gaussian similarity value
for (i <- indexOfValue) {
val GaussianSimilarity = math.exp(-S(n)(i) / 2 / sigma / sigma)
AdjacencyMatrix(n)(i) = GaussianSimilarity
AdjacencyMatrix(i)(n) = GaussianSimilarity
}
calculateAdjacencyMatrix(n + 1, S)
} else {
AdjacencyMatrix
}
}
if (kNNType == "mutualkNN") {
calculateMutualAdjacencyMatrix(0, SMatrix)
} else {
calculateAdjacencyMatrix(0, SMatrix)
}
} 两种操作结果如下:kNN和mutualkNN。PS:由于是直接在IntelliJ直接截图,所以看起来可能没那么好看(ㄒoㄒ)

图5 adjacency Matrix (kNN)

图6 adjacency Matrix (mutualkNN)
两个矩阵计算时k值均指定为2,sigma指定为1,可以观察出,上文矩阵 ⎡⎣⎢⎢⎢0.08.07.05.08.00.06.010.07.06.00.03.05.010.03.00.0⎤⎦⎥⎥⎥ <script type="math/tex" id="MathJax-Element-167"> \begin{bmatrix} 0.0 & 8.0 & 7.0 & 5.0 \\ 8.0 & 0.0 & 6.0 & 10.0 \\ 7.0 & 6.0 & 0.0 & 3.0 \\ 5.0 & 10.0 & 3.0 & 0.0 \end{bmatrix}</script> ,其对应的kNN处理后的W矩阵,比较容易理解,即取任意样本最近的2个样本作为连点即可,而mutualkNN处理后的W矩阵,则需保证连点的两边均是该两点的最近的2个样本之一,举个例子,与第1个样本最近的两个点分别为第3,4个点,其距离分别为7.0和5.0,而第3个点最近的两个点分别为第2,4个点,其距离为6.0和3.0,所以这样下来,与第1个样本连边的点就只有第4个点,看图6可明白。
(三)、 Laplacian Matrix
下面利用上面W(adjacency matrix)矩阵,进一步计算D(degree matrix)矩阵和L(laplacian matrix)矩阵.
// define the function of calculating the Laplacian Matrix
def calculateLaplacianMatrix(adjacencyMatrix: Array[Array[Double]]): Array[Array[Double]] = {
val len = adjacencyMatrix.length
val laplacianMatrix = Array.ofDim[Double](len, len)
// define the function of calculating the degree matrix
def calculateDegreeMatrix(AM: Array[Array[Double]]): Array[Array[Double]] = {
val degreeMatrix = Array.ofDim[Double](len, len)
for (i <- 0 until len) {
degreeMatrix(i)(i) = AM(i).sum
}
degreeMatrix
}
val degreeMatrix = calculateDegreeMatrix(adjacencyMatrix)
// calculate the Laplacian matrix
for (i <- 0 until len) {
laplacianMatrix(i) = degreeMatrix(i).zip(adjacencyMatrix(i)).map(a => a._1 - a._2)
}
laplacianMatrix
} 这里我把D的计算和L的计算写在一起,一步计算到位,结果如下:

图7 degree Matrix

图8 laplacian Matrix
(四)、 Normalized
下面进一步对上面L(laplacian matrix)矩阵进行正则化处理.
// define the function of calculating the normalized Laplacian Matrix
def Normalized(laplacianMatrix: Array[Array[Double]], adjacencyMatrix: Array[Array[Double]]): Array[Array[Double]] = {
val len = adjacencyMatrix.length
// define the function of calculate the -1/2 power of the degree matrix
def calculateAdjustDegreeMatrix(AM: Array[Array[Double]]): Array[Array[Double]] = {
val adjustDegreeMatrix = Array.ofDim[Double](len, len)
for (i <- 0 until len) {
adjustDegreeMatrix(i)(i) = 1 / math.pow(AM(i).sum, 0.5)
}
adjustDegreeMatrix
}
val adjustDegreeMatrix = calculateAdjustDegreeMatrix(adjacencyMatrix)
// calculate the normalized laplacian matrix
def matrixProduct(left: Array[Array[Double]], right: Array[Array[Double]]): Array[Array[Double]] = {
val len = left.length
val output = Array.ofDim[Double](len,len)
for(i <- 0 until len; j <- i until len){
output(i)(j) = left(i).zip(right.map(_(j))).map(a => a._1 * a._2).sum
output(j)(i) = output(i)(j)
}
output
}
val temp = matrixProduct(adjustDegreeMatrix,laplacianMatrix)
val normalizedLaplacianMatrix = matrixProduct(temp,adjustDegreeMatrix)
normalizedLaplacianMatrix
} 下面是上文L(laplacian matrix)矩阵的正则结果:

图9 Normalized laplacian Matrix
(五)、 Eigenvector(Jacobi methond)
下面进一步对上面正则化处理之后的L矩阵L’,取对应的特征向量,组成新的矩阵,特征向量的计算这里用的是串行的Jacobi旋转方法,内在逻辑就是对L’矩阵行列转换,得到L’的相似矩阵,且满足该相似矩阵为对角矩阵。值得一说的是,这种方法小样本可行,大样本效率很低,之后看情况,看是否再把优化的方法写出来,看缘分吧。。。
// define the function of calculating the k smallest eigenvectors of normalized laplacian matrix with Jacobi method.
def kSmallestEigenvectors(k: Int, normalizedLaplacian: Array[Array[Double]]): (Array[Double], Array[Array[Double]]) = {
val len = normalizedLaplacian.length
// initial the eigenvector matrix.
val eigenvectorMatrix = Array.ofDim[Double](len, len)
for (i <- 0 until len) eigenvectorMatrix(i)(i) = 1.0
// initial the parameter of epsilon.
val epsilon = (math.pow(10, -10), -1)
// calculate the largest one Of normalized laplacian matrix(off-diagonal).
def calculateLargestOfNormL(Input: Array[Array[Double]]): (Double, Int) = {
val temp = Input.map(_.zipWithIndex)
val largestOfRow = new Array[(Double, Int)](len - 1)
for (i <- 0 until (len - 1)) {
largestOfRow(i) = temp(i).filter(_._2 > i).sortWith((a, b) => a._1.abs > b._1.abs).head
}
val largestOfInput = largestOfRow.sortWith((a, b) => a._1.abs > b._1.abs).head
if (epsilon._1 > largestOfInput._1.abs) epsilon else largestOfInput
}
var largestOfNormL = calculateLargestOfNormL(normalizedLaplacian)
// Judge condition.
var loop: Boolean = true
// main loop.
while (loop) {
// the index of the largest value of normalized laplacian matrix.
val mRow = largestOfNormL._2
val mCol = normalizedLaplacian(largestOfNormL._2).indexOf(largestOfNormL._1)
// calculate the new normalized Laplacian matrix: angle, sin, cos, new(row,col)
// cache the temp value.
val nL_ij = normalizedLaplacian(mRow)(mCol)
val nL_ii = normalizedLaplacian(mRow)(mRow)
val nL_jj = normalizedLaplacian(mCol)(mCol)
val angle = if (nL_jj == nL_ii) math.Pi / 4.0 else 0.5 * math.atan2(2 * nL_ij, nL_jj - nL_ii)
val sinAngle = math.sin(angle)
val cosAngle = math.cos(angle)
// update the normalized Laplacian matrix (ii, jj, ij, ji)
normalizedLaplacian(mRow)(mRow) = nL_ii * cosAngle * cosAngle + nL_jj * sinAngle * sinAngle - 2 * nL_ij * cosAngle * sinAngle
normalizedLaplacian(mCol)(mCol) = nL_ii * sinAngle * sinAngle + nL_jj * cosAngle * cosAngle + 2 * nL_ij * cosAngle * sinAngle
normalizedLaplacian(mRow)(mCol) = (cosAngle * cosAngle - sinAngle * sinAngle) * nL_ij + sinAngle * cosAngle * (nL_ii - nL_jj)
normalizedLaplacian(mCol)(mRow) = normalizedLaplacian(mRow)(mCol)
for (i <- (0 until len).filter(a => a != mRow && a != mCol)) {
val tempRi = normalizedLaplacian(mRow)(i)
val tempCi = normalizedLaplacian(mCol)(i)
normalizedLaplacian(mRow)(i) = cosAngle * tempRi - sinAngle * tempCi
normalizedLaplacian(mCol)(i) = sinAngle * tempRi + cosAngle * tempCi
normalizedLaplacian(i)(mRow) = normalizedLaplacian(mRow)(i)
normalizedLaplacian(i)(mCol) = normalizedLaplacian(mCol)(i)
}
// update the eigenvector matrix.
for (i <- 0 until len) {
val eigenIR = eigenvectorMatrix(i)(mRow)
val eigenIC = eigenvectorMatrix(i)(mCol)
eigenvectorMatrix(i)(mRow) = eigenIR * cosAngle - eigenIC * sinAngle
eigenvectorMatrix(i)(mCol) = eigenIC * cosAngle + eigenIR * sinAngle
}
// update the temp value again.
largestOfNormL = calculateLargestOfNormL(normalizedLaplacian)
// update the judge condition.
if (largestOfNormL._2 == -1) loop = false
}
// return the k smallest eigenvalue and it's corresponding eigenvector matrix.
val eigenvalue = new Array[Double](len)
for (i <- 0 until len) eigenvalue(i) = normalizedLaplacian(i)(i)
def kSmallest(eigenvalue: Array[Double], eigenvector: Array[Array[Double]]): (Array[Double], Array[Array[Double]]) = {
val eigenvalueWithIndex = eigenvalue.zipWithIndex.sortWith((a, b) => a._1 < b._1).take(k)
val ouput = Array.ofDim[Double](len, k)
var n: Int = 0
for ((v, i) <- eigenvalueWithIndex) {
for (j <- 0 until len) {
ouput(j)(n) = eigenvector(j)(i)
}
n += 1
}
(eigenvalueWithIndex.map(_._1), ouput)
}
val kSmallestValueVector = kSmallest(eigenvalue, eigenvectorMatrix)
// final ouput.
(kSmallestValueVector._1, kSmallestValueVector._2)
} 为直观一点,下面拿矩阵 ⎡⎣⎢⎢⎢0.08.07.05.08.00.06.010.07.06.00.03.05.010.03.00.0⎤⎦⎥⎥⎥ <script type="math/tex" id="MathJax-Element-168"> \begin{bmatrix} 0.0 & 8.0 & 7.0 & 5.0 \\ 8.0 & 0.0 & 6.0 & 10.0 \\ 7.0 & 6.0 & 0.0 & 3.0 \\ 5.0 & 10.0 & 3.0 & 0.0 \end{bmatrix}</script> 计算特征值和特征向量,结果如下:

图10 特征值(对角线)

图11 特征向量
结果可以和Matlab和R,python做比较,我只和R比对过,基本无差。
(六)、 kmeans/GMM
再做一步最终的聚类,便基本完成了算法。
// define the kmeans function.
def kmeans(K: Int, eigenvector: Array[Array[Double]]): Array[(Int, Array[Double])] = {
val len = eigenvector.length
val col = eigenvector(0).length
// initial the random centers.
var center: Map[Int, Array[Double]] = Map()
var Karr: List[Int] = Nil
while(Karr.length < K){
val RandomK = Random.nextInt(len)
if(!Karr.contains(RandomK)) Karr = Karr ::: List(RandomK)
}
for (i <- 0 until K) {
center += (i -> eigenvector(Karr(i)))
}
// classify the points into K clusters with the present center.
def classify(ct: Map[Int, Array[Double]], input: Array[Array[Double]]): Array[(Int, Array[Double])] = {
// calculate the euclidean distance.
val tempArr = input.map(a => {
val euclidean = new Array[Double](K)
for (i <- 0 until K) {
euclidean(i) = ct(i).zip(a).map(m => math.pow(m._1 - m._2, 2)).sum
}
euclidean.zipWithIndex
})
// tagging the points.
val tagging = tempArr.map(a => {
val tag = a.sortWith((x, y) => x._1 < y._1).head
tag._2
})
// output.
val output = tagging.zip(input)
output
}
//val pointsWithTag = classify(center, eigenvector)
// update the center.
def updateCenter(oldCenter: Map[Int, Array[Double]], PWT: Array[(Int, Array[Double])]): Map[Int, Array[Double]] = {
// groupby the result for computing.
val clusters = PWT.groupBy(_._1)
// update the newCenter
var newCenter: Map[Int, Array[Double]] = Map()
for (i <- 0 until K) {
val clustersI = clusters.get(i) match {
case Some(s) => s.map(_._2)
//case None => new Array(col)
}
val n = clustersI.length
val centerI = for (j <- 0 until col) yield clustersI.map(_ (j)).sum / n
newCenter += (i -> centerI.toArray)
}
newCenter
}
//val newCenter = updateCenter(center,pointsWithTag)
// initialize the blank variable.
var pointsWithTag: Array[(Int, Array[Double])] = Array()
var newCenter: Map[Int, Array[Double]] = Map()
var movement: Seq[Double] = Seq()
// loop.
var loop: Boolean = true
var j = 0
while (loop) {
j += 1
// tagging the points and update the center.
pointsWithTag = classify(center, eigenvector)
newCenter = updateCenter(center, pointsWithTag)
// the movement of the center.
movement = for (i <- 0 until K) yield newCenter(i).zip(center(i)).map(a => (a._1 - a._2).abs).sum
// judge the movement is small enough or not. movement.exists(_ > math.pow(10, -10))
if (movement.exists(_ > math.pow(10, -5))) {
center = newCenter
} else {
loop = false
}
}
pointsWithTag
//newCenter
//j
} 按照上文pesudo-code的指引,一步一步操作,最终输出结果如下,spectral clustering和kmeans的对比(twocircles datase): 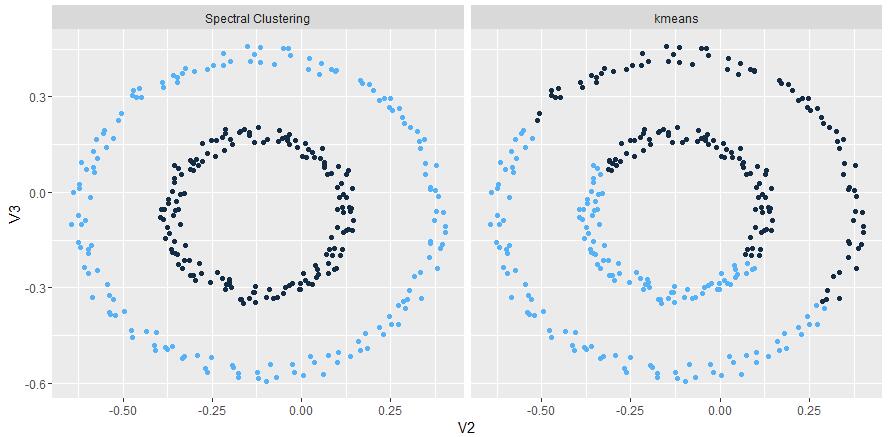
图12 spectral clustering和kmeans的对比
四、一些参考资料
- Meila,shi: A Random Walks View of Spectral Segmentation
- Harry Yserentant: A short theory of the Rayleigh-Ritz method
- Ulrike von Luxburg: A Tutorial on Spectral Clustering
- Andrew Y.Ng, Michael I.Jordan, Yair Weiss: On Spectral Clustering Analysis and an algorithm
- L. LOVASZ: Random Walks on Graphs: A Survey
- Fan R.K. Chung: Spectral Graph Theory
- Xiao-Dong Zhang: The Laplacian eigenvalues of graphs: a survey
- Bojan Mohar: THE LAPLACIAN SPECTRUM OF GRAPHS
- pluskid: http://blog.pluskid.org/?p=287
- Wiki: https://en.wikipedia.org/wiki/Jacobi_eigenvalue_algorithm
- G. E. FORSYTHE AND P. HENRICI:THE CYCLIC JACOBI METHOD FOR COMPUTING THE PRINCIPAL VALUES OF A COMPLEX MATRIX
- Jacobi Transformations of a Symmetric Matrix

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 163
163 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)