【Matlab】在Simulink中仿真Clarke变换
Simulink仿真Clarke变换
·

1.Clarke变换
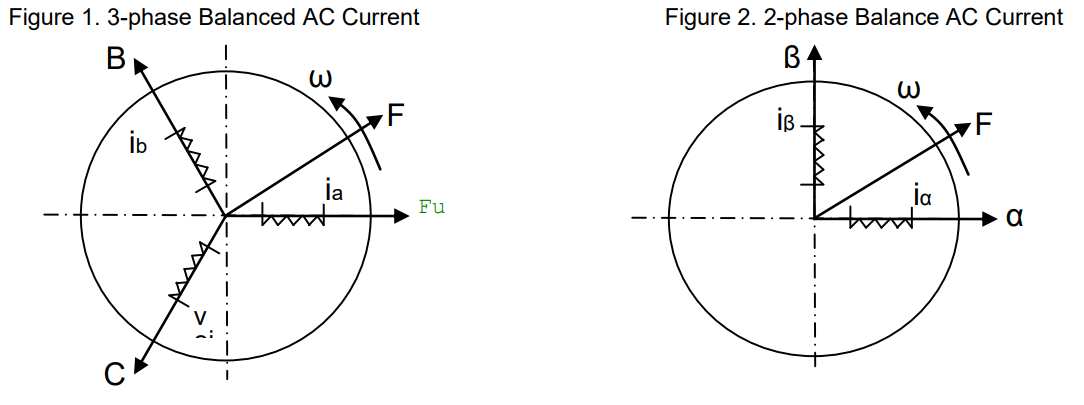
Clarke变换的实质就是将矢量F的表示形式从3相静止坐标系表示转换为通过2相静止坐标系来表示;
1.1.数学表达式
矩阵的表示形式为:(注:采用等幅变换,同时忽略零序分量;)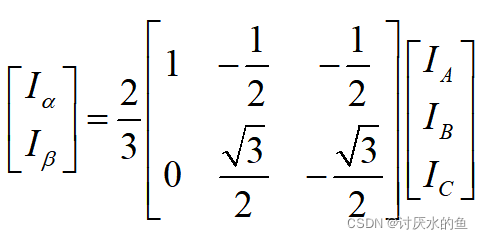
假设输入三相平衡的交流信号,则有: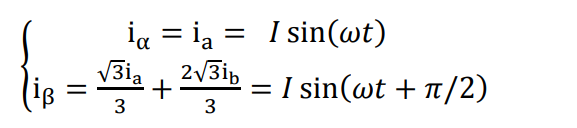
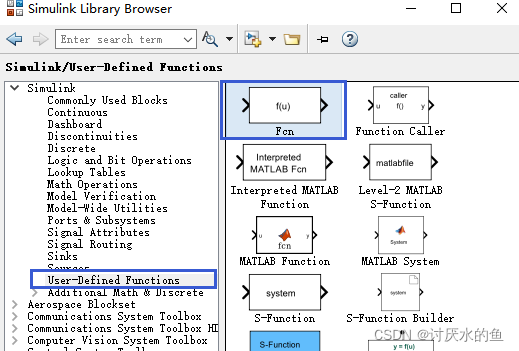
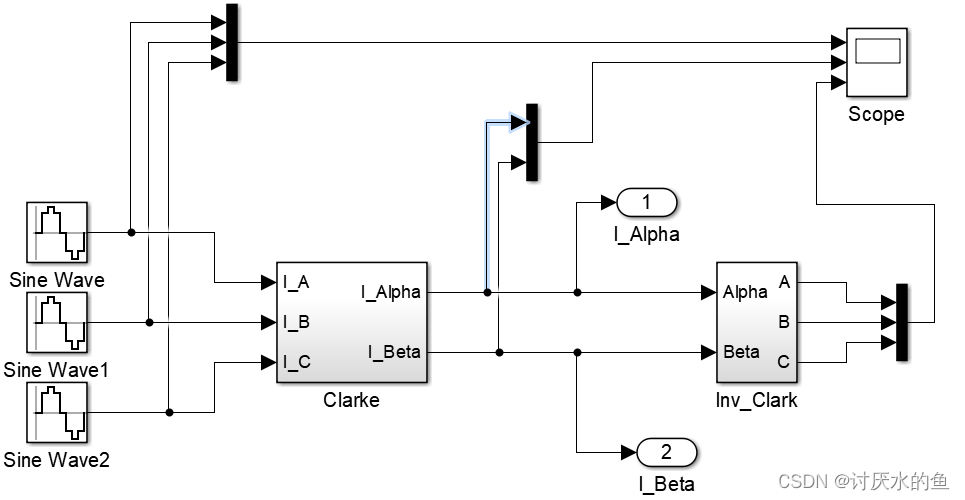
1.2.Simulink模型搭建:

封装为子模块: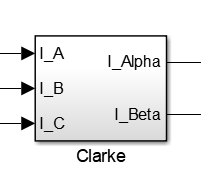
2.反Clarke变换
2.1.数学表达式
矩阵的表示形式为:(注:忽略零序分量)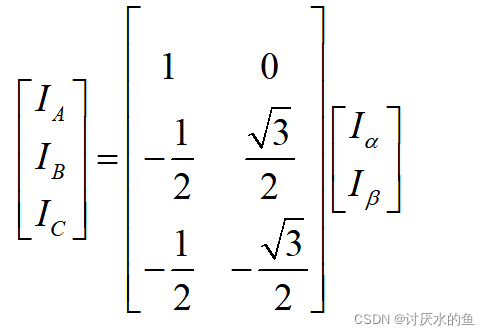
写为表达式的形式: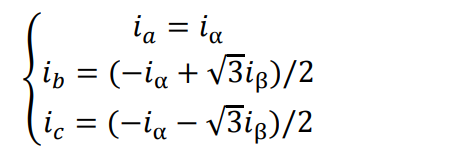
2.2.Simulink模型搭建:
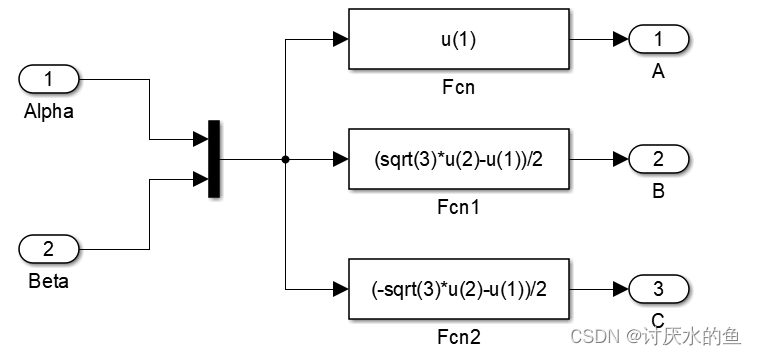
封装为子模块: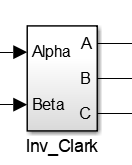
3.Simulink仿真
3.1.信号输入和参数设置
输入为50Hz正弦信号,A,B,C个信号源的相位差为120°;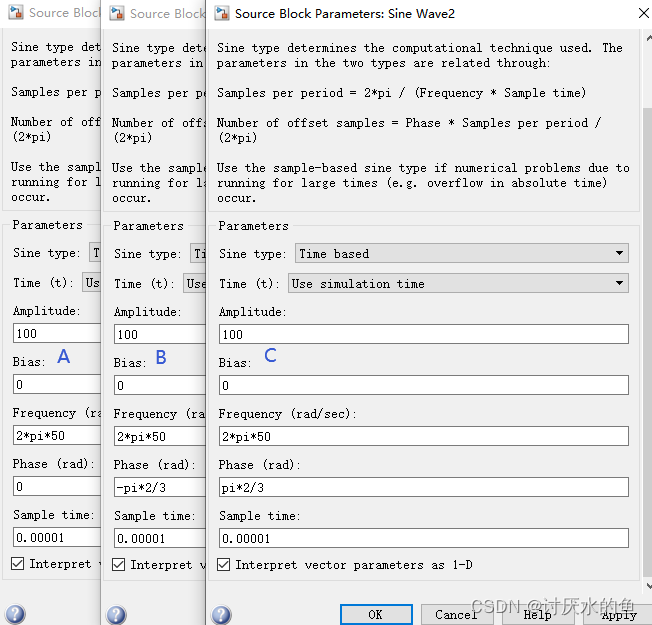
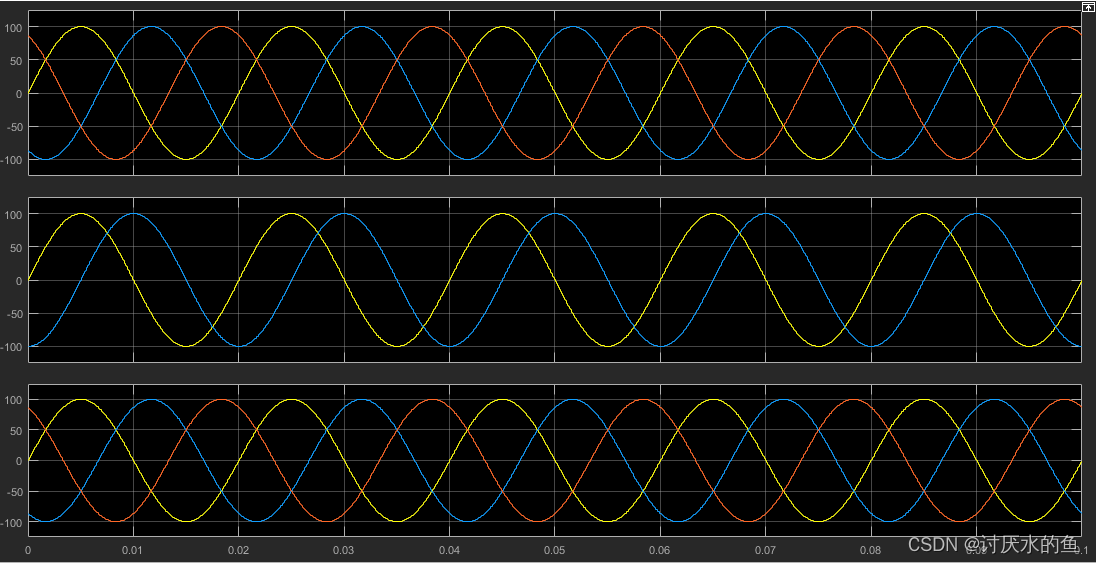
3.2.仿真结果
参考文档
1.FOC中的Clarke变换和Park变换详解
2.Coordinate Transform in Motor Control

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 21
21 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)