【Luenberger Observer】龙贝格观测器及示例Matlab仿真
Luenberger Observer,龙贝格观测器,通过在原系统添加基于输出误差校正项,构造状态空间方程
·
目录
龙贝格观测器
观测器:根据系统的输入u和输出y估计系统的状态x。
SISO系统的状态空间方程如下
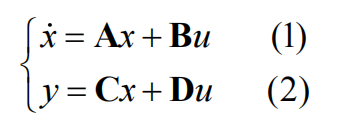
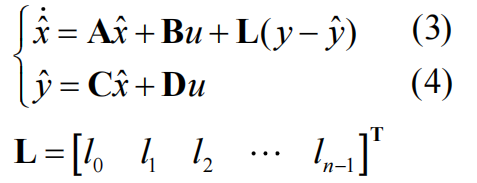
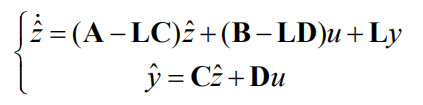
龙贝格观测器,通过在原系统添加基于输出误差校正项,构造状态空间方程,设x_hat为估计值,y_hat为估计值的输出,L为自由选择向量。
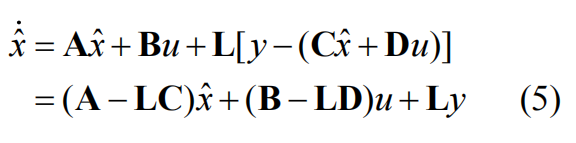
公式(4)带入公式(3)
公式(1)减去公式(5),带入公式(2)
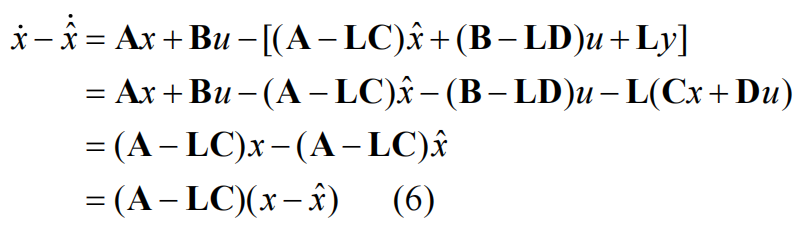
实际系统与观测系统的状态误差为e
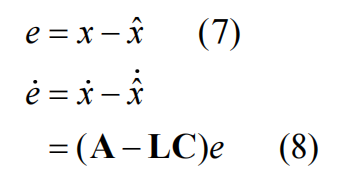
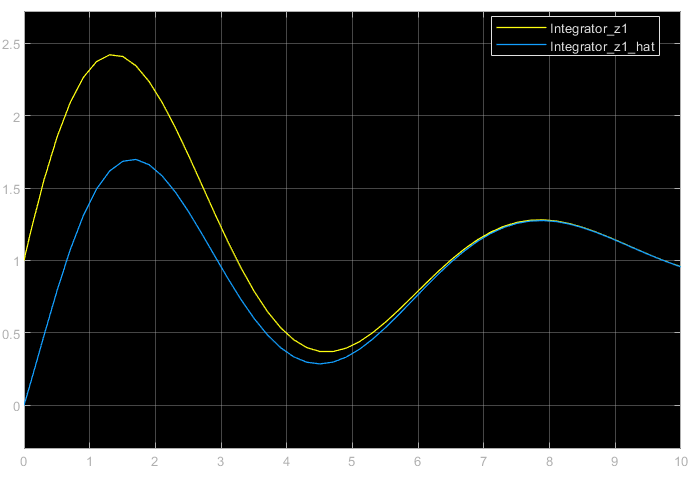
龙贝格观测器相当于建立一个新的反馈系统,使得状态误差e趋于0,则A-LC渐进稳定,即A-LC的特征值实部小于0。
龙贝格观测器示例和仿真
以 质量-弹簧-阻尼系统 为例
定义:x为位移,x_dot1为速度,x_dot2为加速度,f为输入u,x为输出y。
![]()
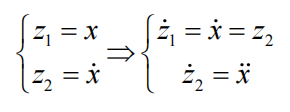
质量-弹簧-阻尼系统微分方程
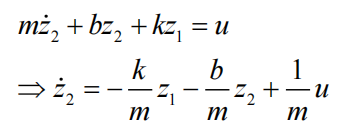
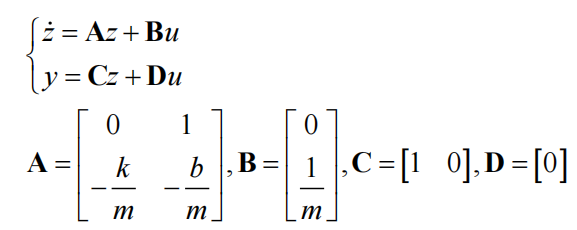
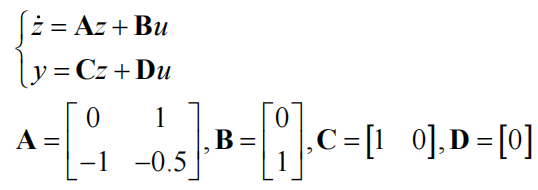
质量-弹簧-阻尼系统的状态空间方程如下
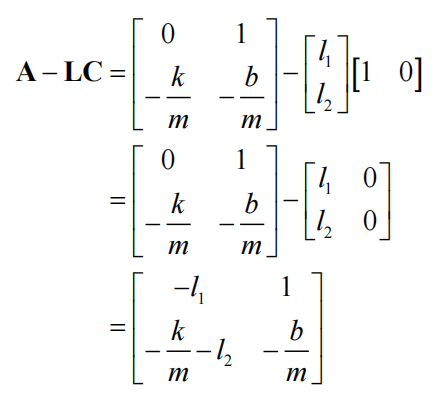
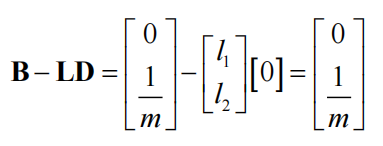
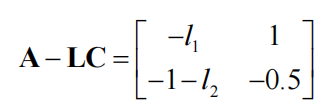
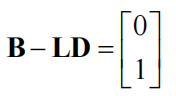
下面计算龙贝格观测器的状态空间方程
定义自由选择向量 L
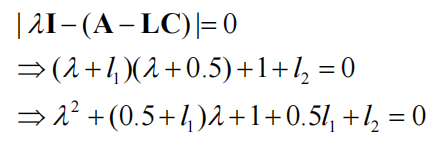
假设质量m=1,阻尼系数b=0.5,弹簧系数k=1
求 A-LC 的特征值
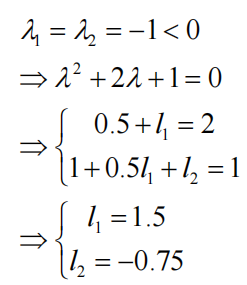
令特征值为-1(稳定性),求出 l1 和 l2
原系统状态空间方程
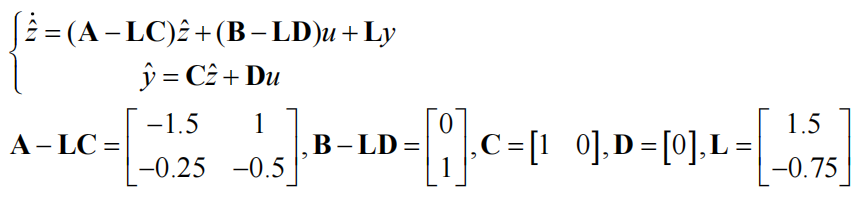
龙贝格观测器的状态空间方程
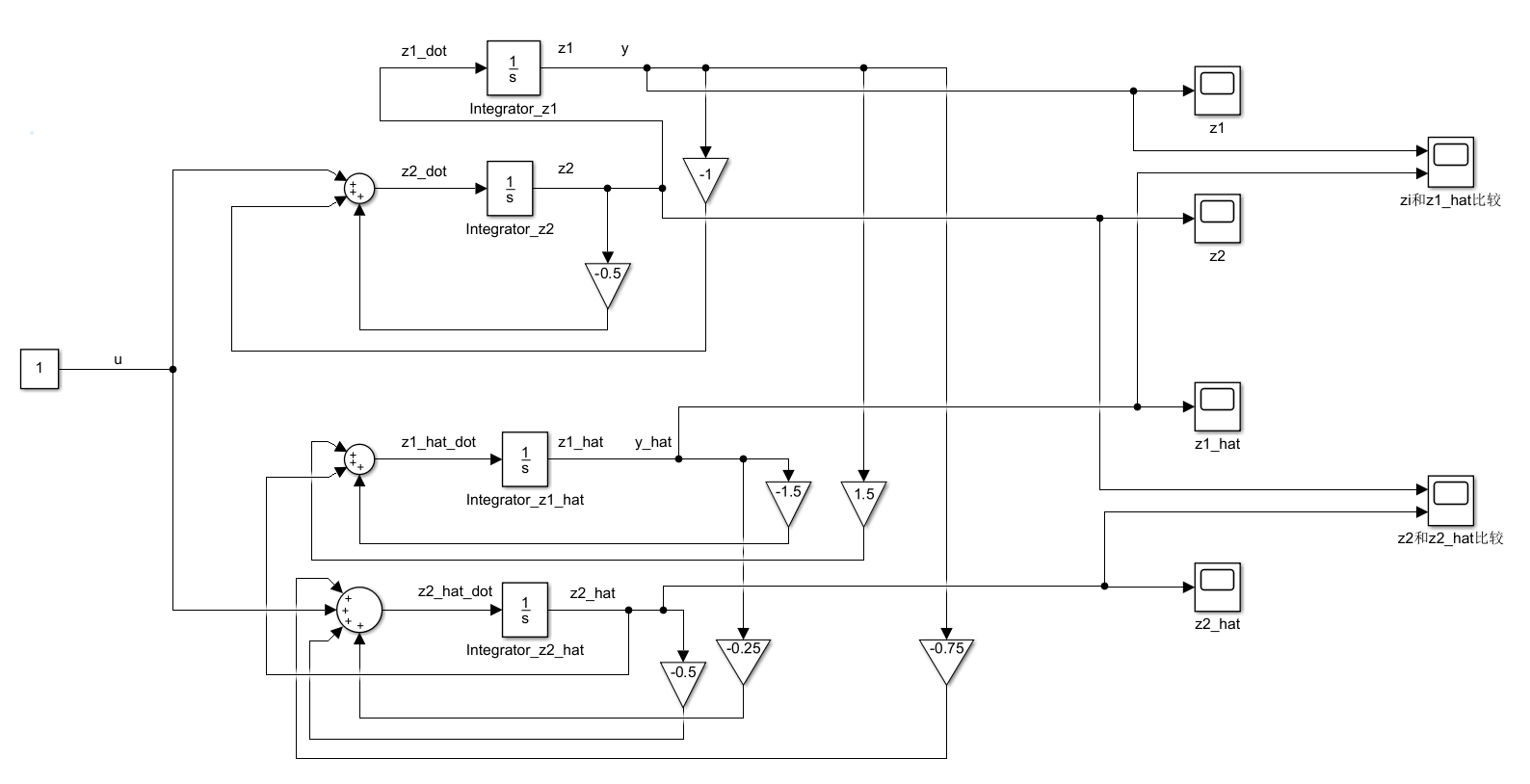
Matlab仿真
仿真文件在CSDN资源或网盘 密码:gztj


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 14
14 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)