基于栅格地图的无人机三维路径规划-matlab仿真
·
算法说明
利用matlab三维栅格地图进行路径规划的仿真演示。目的是为了比较不同算法在面对不同三维环境时的路径规划效果,探讨不同类型的三维空间应采用何种搜索策略。本次仅选取了三种不同策略的算法作为代表:基于概率的RRT算法、基于群智能的蚁群算法、基于搜索的A*算法,利用贝塞尔曲线(Bezier Curve)进行简单的路径平滑处理。
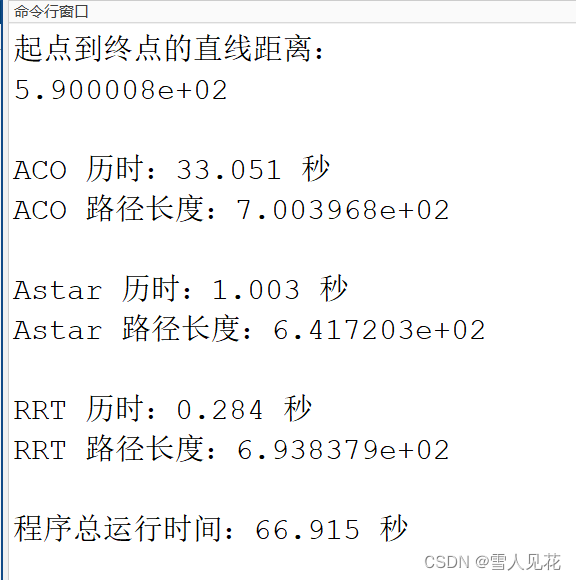
程序运行时间 = 算法本身运行时间 + matlab绘制地图时间
故:地图越复杂,算法运行时间越长
注:算法为本人(雪人不见花)原创,注释纯手敲,请大家获取代码后点个免费的赞吧!
(GIthub、b站)
另:算法效率较低,仍有极大的提升空间,算法思路依然有极大的不完善,烦请各位大佬改进修正
完整代码获取
https://download.csdn.net/download/qq_51985653/88878735
https://github.com/Xuerenbujianhua/3DPathplanning
运行效果图
使用RRT、A*、ACO分别实现三维路径规划算法的运行效果图
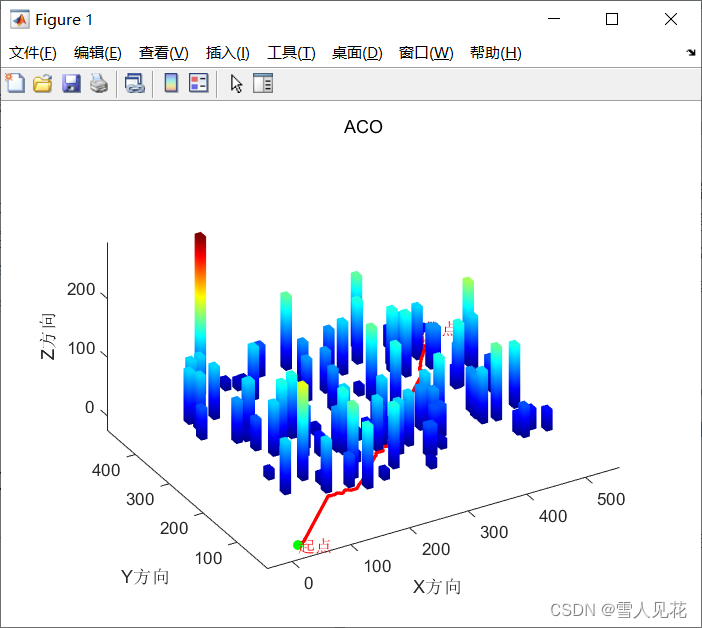
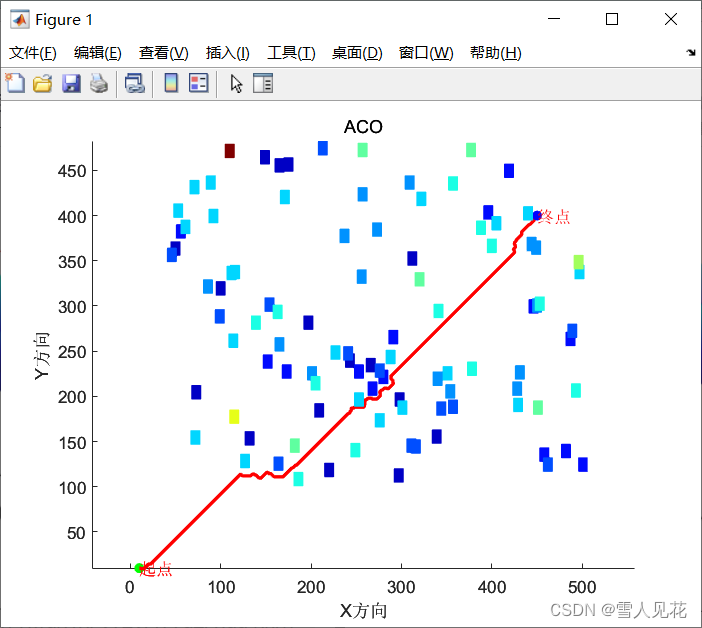
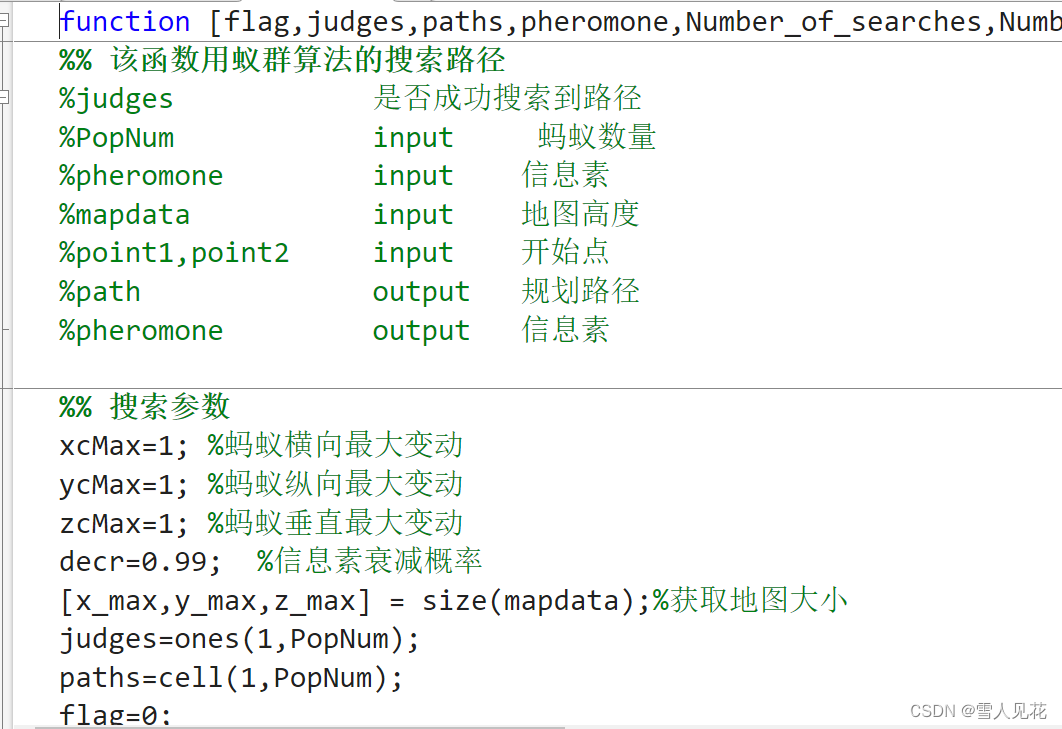
ACO算法
蚁群算法:需要调整参数较多,实现的算法原理也有待精进,故算法效率不高。理想情况下。ACO算法的搜索时间也应只有几秒。
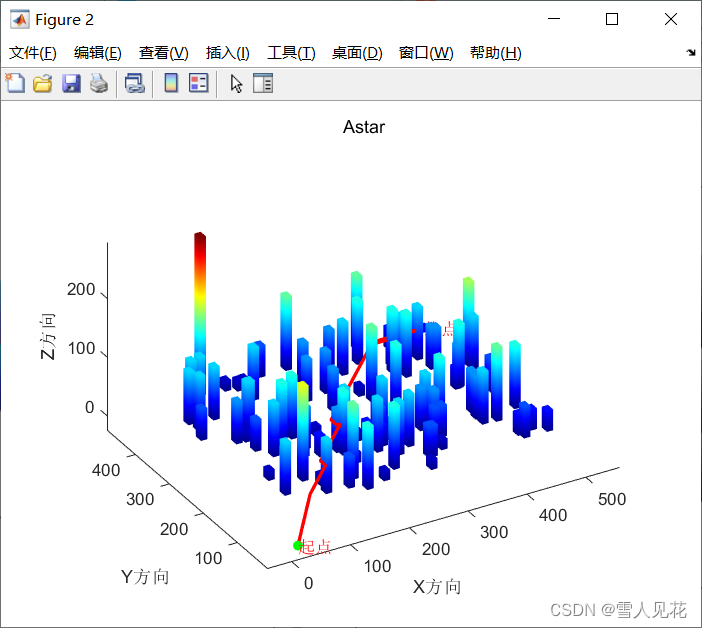
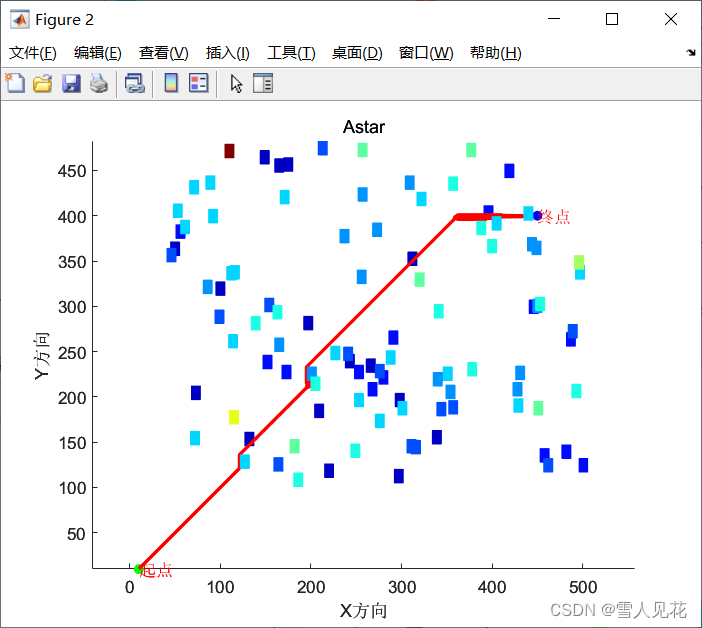
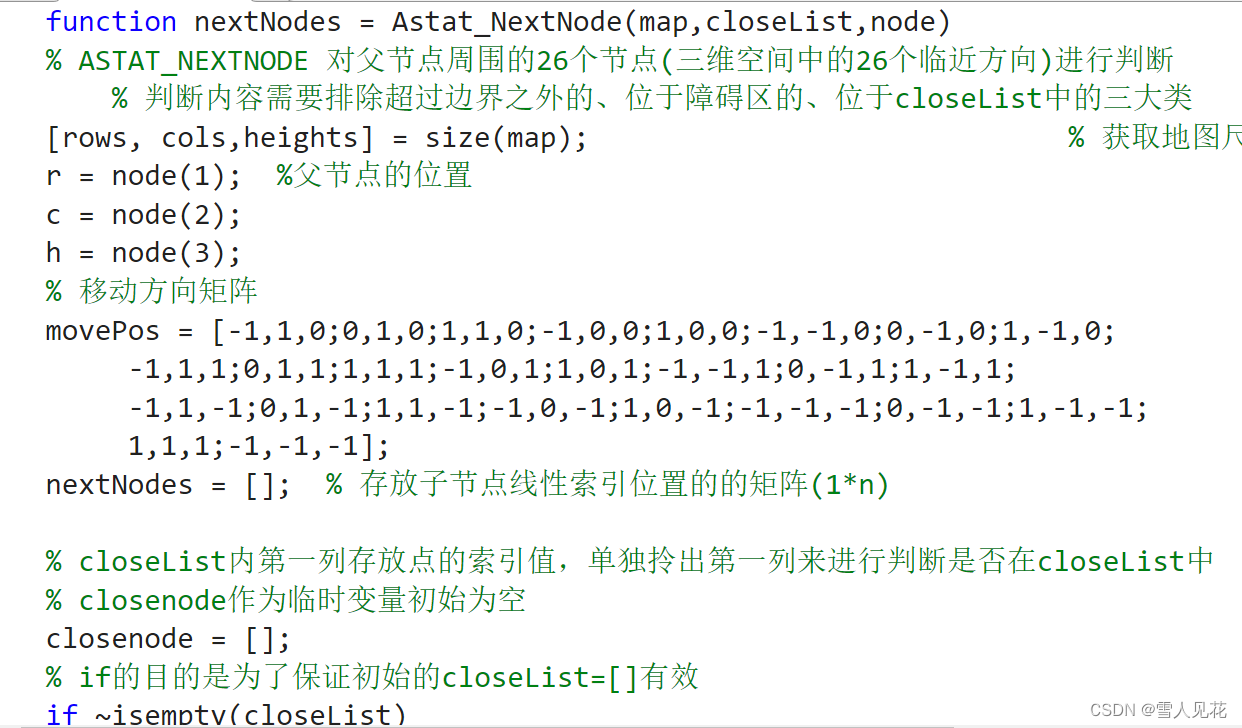
Astar算法
A*算法原理简单、实现方便。
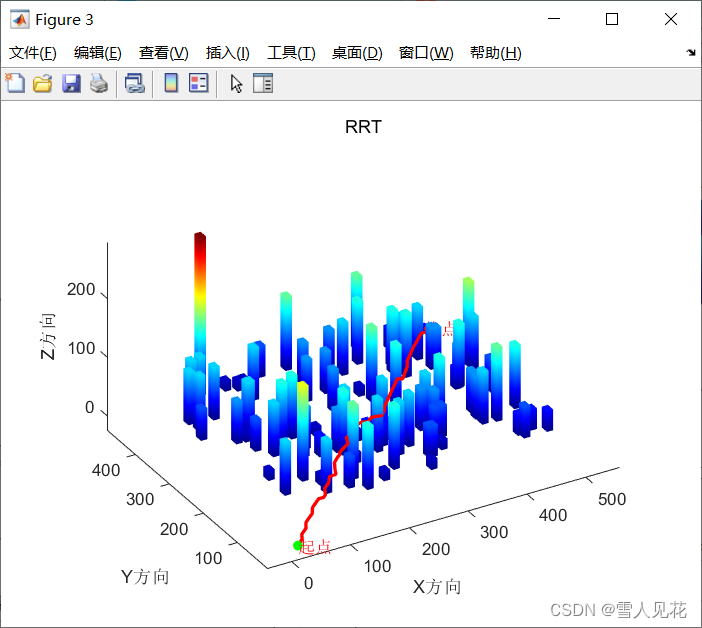
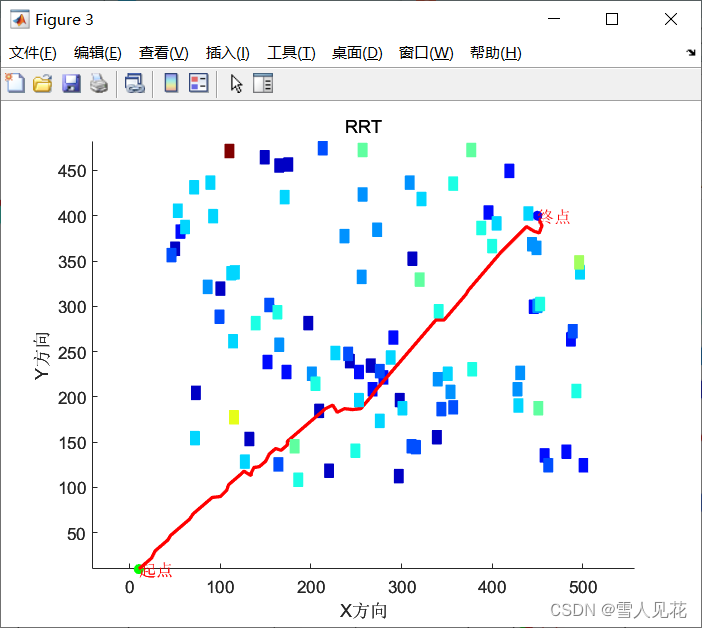
RRT算法
RRT算法随机性较强,算法性能上下浮动。
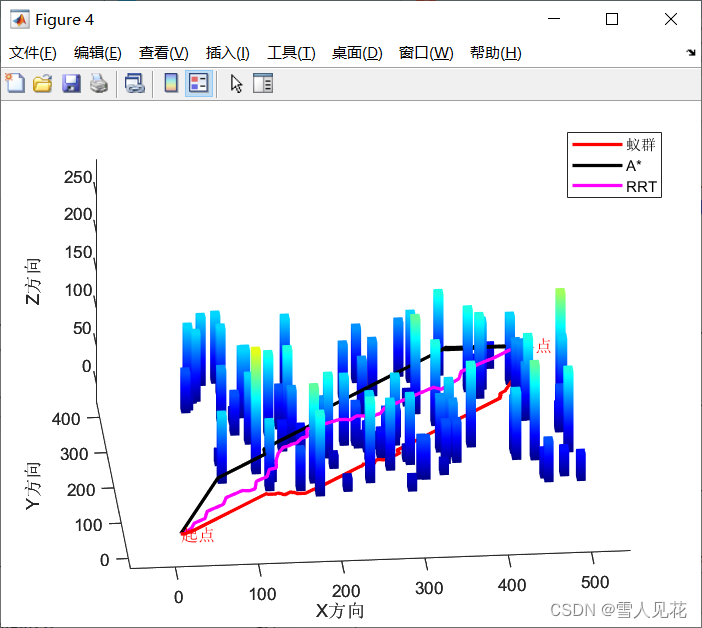
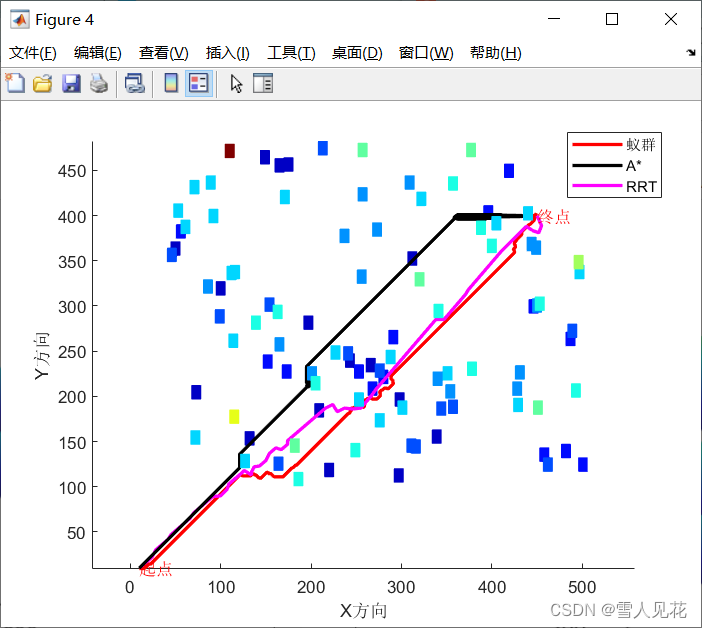
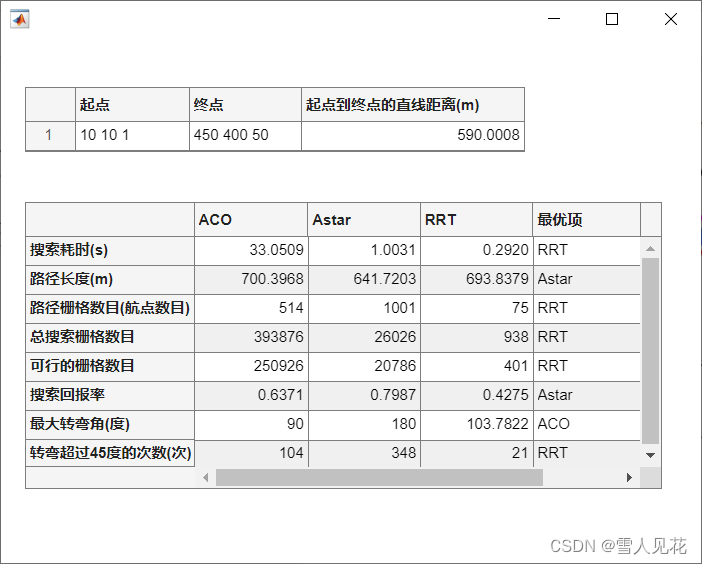
三种算法综合比较
在同一张地图中比较三种算法的运行效果。
算法评价
计算算法的搜索效率及路径效率。
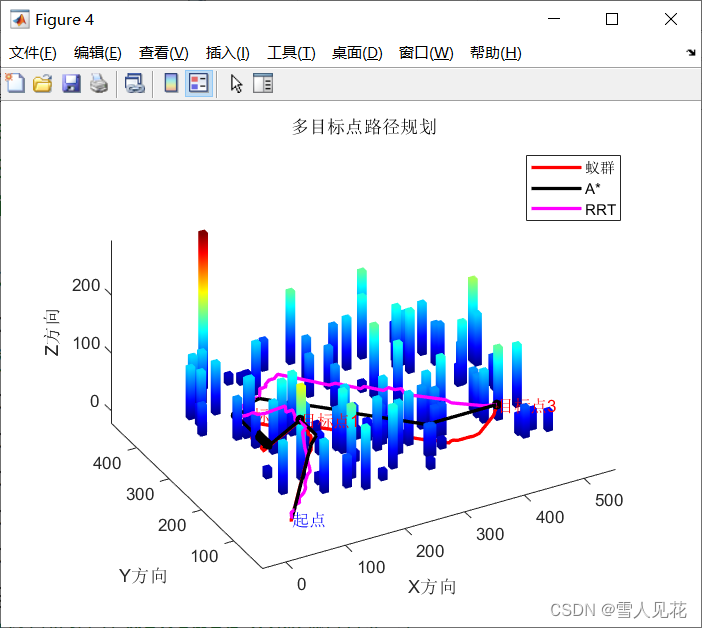
多目标点的路径规划

代码结构
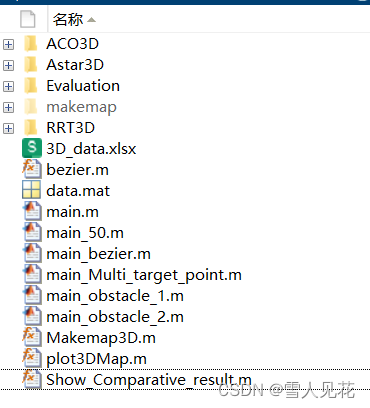
代码含详细注释

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 55
55 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)