斯坦福Doggo源码研读
说明:该文章用于记录本人对斯坦福Doggo开源代码中的代码框架以及位控的理解,本人所在的实验室已经成功复现Doggo的功能。由于复现的工作由学长完成,所有可能以下有部分代码理解存在偏差,欢迎批评指正。联系方式:2250017028@qq.com参考资料:斯坦福Doggo开源代码解码斯坦福开源狗DogGo–附硬件清单、源码、图纸、论文1.代码框架注:以下的分层是我根据整体代码的函数实现来分,即以主要
说明:该文章用于记录本人对斯坦福Doggo开源代码中的代码框架以及位控的理解,本人所在的实验室已经成功复现Doggo的功能。由于复现的工作由学长完成,所有可能以下有部分代码理解存在偏差,欢迎批评指正。
联系方式:2250017028@qq.com
参考资料:
斯坦福Doggo开源代码
解码斯坦福开源狗DogGo–附硬件清单、源码、图纸、论文
1.代码框架
注:以下的分层是我根据整体代码的函数实现来分,即以主要的函数来进行划分,而非文件划分,具体的文件内容可以参考上面的第二个参考资料
(1)上层
整份代码体现出上层思想的就只有position_control文件中的THD_FUNCTION(PositionControlThread, arg) 函数,它实际上就是一个状态机,根据不同的状态来选择不同的工作参数或者模式。
THD_FUNCTION(PositionControlThread, arg) {
(void)arg;
SetODriveCurrentLimits(CURRENT_LIM);
chThdSleepMilliseconds(100);
SetODriveCurrentLimits(CURRENT_LIM);
while(true) {
struct GaitParams gait_params = state_gait_params[state];
switch(state) {
case STOP:
{
LegGain stop_gain = {50, 0.5, 50, 0.5};
float y1 = 0.15;
float y2 = 0.15;
float theta1, gamma1, theta2, gamma2;
CartesianToThetaGamma(0.0, y1, 1, theta1, gamma1);
CartesianToThetaGamma(0.0, y2, 1, theta2, gamma2);
odrv0Interface.SetCoupledPosition(theta2, gamma2, stop_gain);
odrv1Interface.SetCoupledPosition(theta1, gamma1, stop_gain);
odrv2Interface.SetCoupledPosition(theta1, gamma1, stop_gain);
odrv3Interface.SetCoupledPosition(theta2, gamma2, stop_gain);
}
break;
case DANCE:
gait(gait_params, 0.0, 0.5, 0.0, 0.5, gait_gains);
break;
case BOUND:
gait(gait_params, 0.0, 0.5, 0.5, 0.0, gait_gains);
break;
case TROT:
gait(gait_params, 0.0, 0.5, 0.0, 0.5, gait_gains);
break;
case TURN_TROT:
gait(gait_params, 0.0, 0.5, 0.0, 0.5, gait_gains);
break;
case WALK:
gait(gait_params, 0.0, 0.25, 0.75, 0.5, gait_gains);
break;
case PRONK:
gait(gait_params, 0.0, 0.0, 0.0, 0.0, gait_gains);
break;
case JUMP:
ExecuteJump();
break;
case ROTATE:
{
float theta,gamma;
CartesianToThetaGamma(0, 0.24, 1.0, theta, gamma);
float freq = 0.1;
float phase = freq * (millis() - rotate_start)/1000.0f;
theta = (-cos(2*PI * phase) + 1.0f) * 0.5 * 2 * PI;
CommandAllLegs(theta, gamma, gait_gains);
}
case HOP:
hop(gait_params);
break;
case FLIP:
ExecuteFlip(gait_params);
break;
case RESET:
reset();
break;
case TEST:
test();
break;
}
chThdSleepMicroseconds(1000000/POSITION_CONTROL_FREQ);
}
}
(2)中层
- 步态参数表
stance_height ----站立时身体重心距离地面高度
down_AMP -----Y轴最低高度
up_AMP----Y轴最大高度
flight_percent ----一个周期中,离地时间的占比
step_length----步长
FREQ----运动频率(不是控制频率)
step_diff----两腿的相位差
// {stance_height, down_AMP, up_AMP, flight_percent (proportion), step_length, FREQ,step_diff}
struct GaitParams state_gait_params[] = {
//{s.h, d.a., u.a., f.p., s.l., fr., s.d.}
{NAN, NAN, NAN, NAN, NAN, NAN, NAN}, // STOP
{0.17, 0.04, 0.06, 0.35, 0.15, 2.0, 0.0}, // TROT
{0.17, 0.04, 0.06, 0.35, 0.0, 2.0, 0.0}, // BOUND
{0.15, 0.00, 0.06, 0.25, 0.0, 1.5, 0.0}, // WALK
{0.12, 0.05, 0.0, 0.75, 0.0, 1.0, 0.0}, // PRONK
{NAN, NAN, NAN, NAN, NAN, NAN, NAN}, // JUMP
{0.15, 0.05, 0.05, 0.35, 0.0, 1.5, 0.0}, // DANCE
{0.15, 0.05, 0.05, 0.2, 0.0, 1.0, 0.0}, // HOP
{NAN, NAN, NAN, NAN, NAN, 1.0, NAN}, // TEST
{NAN, NAN, NAN, NAN, NAN, NAN, NAN}, // ROTATE
{0.15, 0.07, 0.06, 0.2, 0.0, 1.0, 0.0}, // FLIP
{0.17, 0.04, 0.06, 0.35, 0.1, 2.0, 0.06}, // TURN_TROT
{NAN, NAN, NAN, NAN, NAN, NAN, NAN} // RESET
};
- 步态执行流程
主要函数是position_control文件中的gait 函数
void gait(struct GaitParams params,
float leg0_offset, float leg1_offset,
float leg2_offset, float leg3_offset,
struct LegGain gains) {
struct GaitParams paramsR = params;
struct GaitParams paramsL = params;
paramsR.step_length -= params.step_diff;
paramsL.step_length += params.step_diff;
if (!IsValidGaitParams(paramsR) || !IsValidGaitParams(paramsL) || !IsValidLegGain(gains)) {
return;
}
float t = millis()/1000.0;
const float leg0_direction = -1.0;
CoupledMoveLeg(odrv0Interface, t, paramsL, leg0_offset, leg0_direction, gains,
global_debug_values.odrv0.sp_theta, global_debug_values.odrv0.sp_gamma);
const float leg1_direction = -1.0;
CoupledMoveLeg(odrv1Interface, t, paramsL, leg1_offset, leg1_direction, gains,
global_debug_values.odrv1.sp_theta, global_debug_values.odrv1.sp_gamma);
const float leg2_direction = 1.0;
CoupledMoveLeg(odrv2Interface, t, paramsR, leg2_offset, leg2_direction, gains,
global_debug_values.odrv2.sp_theta, global_debug_values.odrv2.sp_gamma);
const float leg3_direction = 1.0;
CoupledMoveLeg(odrv3Interface, t, paramsR, leg3_offset, leg3_direction, gains,
global_debug_values.odrv3.sp_theta, global_debug_values.odrv3.sp_gamma);
}
流程的思维导图如下: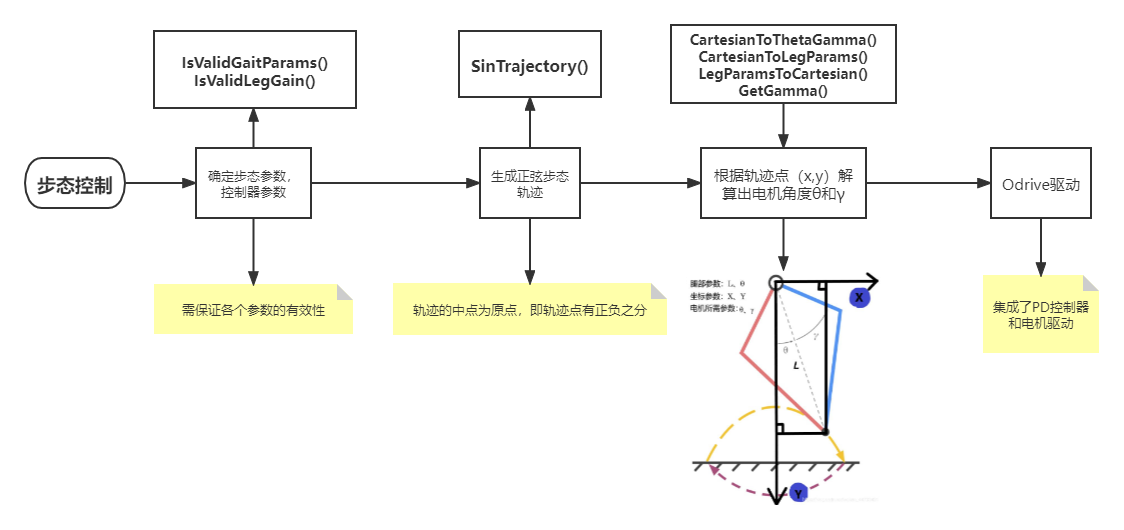
函数具体实现就不作分析了,根据函数名即可知道各个函数的具体作用。
(3)底层
主要包括以下几个部分
uart ----串口
usb_serial ----USB串口
Odrive ----电机驱动
imu ----陀螺仪,用于获取身体姿态
对于不同的主控以及外设的型号,底层的驱动代码都不尽相同,所以这里就不展开对底层代码的分析。在复现的时候,最好是根据使用的各个外设型号,去编写对应的驱动代码。
2.步态实现分析
说明:这里只分析跳跃(jump)和后空翻(backfilp)两种步态,因为只有这两种步态需要不断调整步态参数
(1)jump
整个流程十分清晰
腿:准备->缩腿->伸腿->恢复
狗:站立->趴下->跳起->站立
/**
* Drives the ODrives in an open-loop, position-control sinTrajectory.
*/
void ExecuteJump() {
const float prep_time = 0.5f; // Duration before jumping [s]
const float launch_time = 0.8f ; // Duration before retracting the leg [s]
const float fall_time = 1.0f; //Duration after retracting leg to go back to normal behavior [s]
const float stance_height = 0.081f; // Desired leg extension before the jump [m]
const float jump_extension = 0.249f; // Maximum leg extension in [m]
const float fall_extension = 0.13f; // Desired leg extension during fall [m]
float t = millis()/1000.0f - start_time_; // Seconds since jump was commanded
if (t < prep_time) {
float x = 0;
float y = stance_height;
float theta,gamma;
CartesianToThetaGamma(x, y, 1.0, theta, gamma);
// Use gains with small stiffness and lots of damping
struct LegGain gains = {50, 1.0, 50, 1.0};
CommandAllLegs(theta,gamma,gains);
// Serial << "Prep: +" << t << "s, y: " << y;
} else if (t >= prep_time && t < prep_time + launch_time) {
float x = 0;
float y = jump_extension;
float theta, gamma;
CartesianToThetaGamma(x, y, 1.0, theta, gamma);
// Use high stiffness and low damping to execute the jump
struct LegGain gains = {240, 0.5, 240, 0.2};
CommandAllLegs(theta, gamma, gains);
// Serial << "Jump: +" << t << "s, y: " << y;
} else if (t >= prep_time + launch_time && t < prep_time + launch_time + fall_time) {
float x = 0;
float y = fall_extension;
float theta,gamma;
CartesianToThetaGamma(x, y, 1.0, theta, gamma);
// Use low stiffness and lots of damping to handle the fall
struct LegGain gains = {50, 1.0, 50, 1.0};
CommandAllLegs(theta, gamma, gains);
// Serial << "Retract: +" << t << "s, y: " << y;
} else {
state = STOP;
Serial.println("Jump Complete.");
}
// Serial << '\n';
}
注意:
- 弹跳与x轴无关,所以这里只考虑y轴的运动。
- jump_extension 和 fall_extension这两个变量表示的是弹跳和下落的起始高度,由于y轴以下为正,所以前者大于后者
(2)backflip
后空翻的整个流程需要结合上面的动图来看。翻转主要是利用了狗腿伸缩产生的力作为弹跳力,在空中时,每只腿都保持与身体垂直,这个时候电机产生的扭矩也会带动身体运动。
void ExecuteFlip(struct GaitParams params) {
const float prep_time = 0.6f; // Duration before jumping [s]
const float launch_time = 0.1f; // Duration before retracting the leg [s]
struct LegGain rear_gains = {120,1,80,1};
float rear_up_len = 0.08;
float rear_down_len = 0.24;
float t = millis()/1000.0f - flip_start_time_;
float pitch = global_debug_values.imu.pitch;
float theta=0,gamma=0;
// Preparing to jump
// 1.准备状态,各腿与身体垂直
if (t < prep_time) {
float y_back = rear_up_len;
CommandLegsThetaY(pitch, y_back, rear_gains, BACK);
float y_front = params.stance_height - params.up_amp;
CommandLegsThetaY(pitch, y_front, gait_gains, FRONT);
// Push off with front feet
// 2.前腿降低,准备起跳
} else if (t >= prep_time && t < prep_time + launch_time) {
float y_back = rear_up_len;
CommandLegsThetaY(pitch, y_back, rear_gains, BACK);
float y_front = params.stance_height + params.down_amp;
CommandLegsThetaY(pitch, y_front, gait_gains, FRONT);
// Rotate front legs to catch
// 3.前腿上升,产生弹跳力
} else if (pitch < 90.0*M_PI/180.0) {
float y_back = rear_up_len;
CommandLegsThetaY(pitch, y_back, rear_gains, BACK);
float y_front = params.stance_height;
CommandLegsThetaY(-pitch, y_front, gait_gains, FRONT);
// Push off with back feet, keep rotating front legs to catch
// 4.身体与地面垂直后,后腿降低,维持旋转状态
} else if (pitch < 130.0*M_PI/180.0) {
float y_back = rear_down_len;
CommandLegsThetaY(pitch, y_back, gait_gains, BACK);
float y_front = params.stance_height;
CommandLegsThetaY(-pitch, y_front, gait_gains, FRONT);
// 5.后腿上升,产生弹跳力,使之继续旋转
} else if (pitch < 180.0*M_PI/180.0){
float y_back = params.stance_height;
CommandLegsThetaY(pitch, y_back, gait_gains, BACK);
float y_front = params.stance_height;
CommandLegsThetaY(-pitch, y_front, gait_gains, FRONT);
// 6.各腿保持与身体垂直,直至落地
} else {
struct LegGain landing_gains = {120,1,50,1.5};
float y_back = params.stance_height;
CommandLegsThetaY(pitch, y_back, landing_gains, BACK);
float y_front = params.stance_height;
CommandLegsThetaY(pitch - 2*M_PI, y_front, landing_gains, FRONT);
}
}

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 10
10 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)