GNSS 卡尔曼滤波算法公式
在GNSS中应用卡尔曼滤波算法原理介绍
目录
(4)根据计算得到的k时刻修正值,即可对接收机位置和钟差进行修正
1.卡尔曼滤波算法原理
卡尔曼滤波用一套数学递推公式对系统状态进行最优估计,使系统状态的估计值有最小均方误差(MMSE)。
标准卡尔曼滤波模型为:(包括两个方程:状态方程、观测方程)
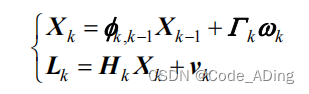
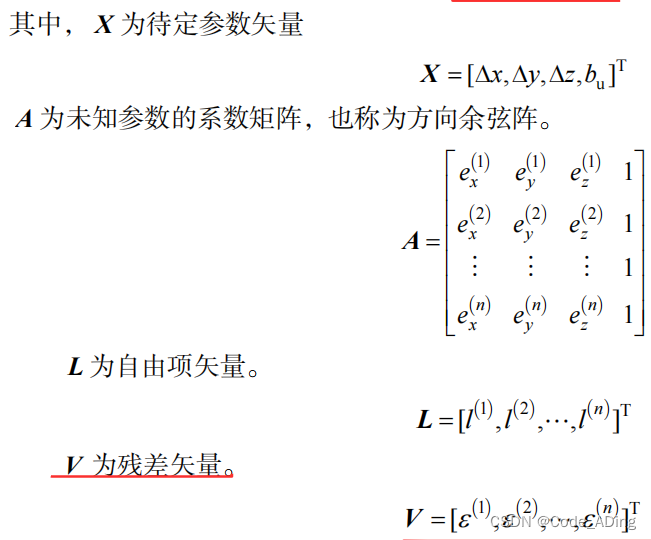
X:状态向量。
注:状态向量中各个待求的初始值取值很重要。对于精密单点定位(PPP)来说,很多待求参数的初始值取值一般来自于标准单点定位(SPP),对于SPP求解待求参数时,有不同的取法,具体可以参考这篇:伪距单点定位算法原理以及利用最小二乘法计算实例-CSDN博客
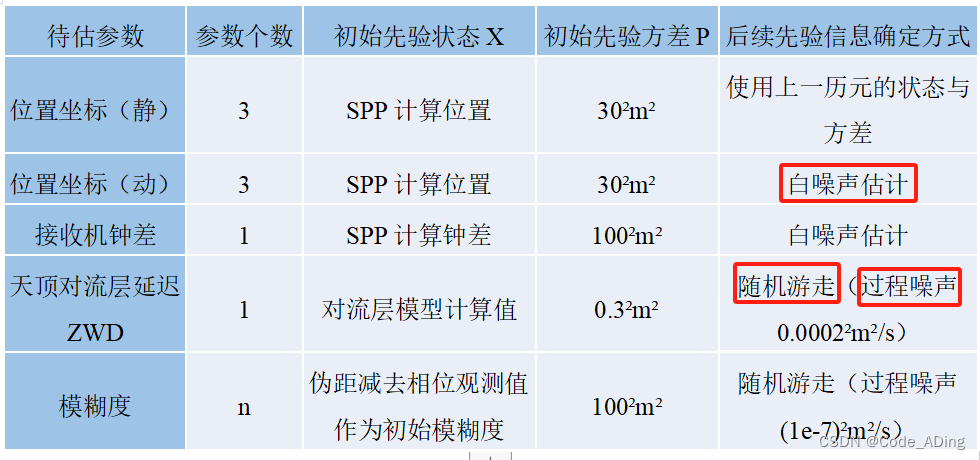
P:方差-协方差矩阵,状态向量的方差-协方差矩阵,待求参数的方差-协方差阵。初始先验方差。(下文包含各参数的初始先验方差,以及一些参数是白噪声估计还是随机游走模型估计)
白噪声(White Noise)估计:待估状态与其他状态不相关,在时间更新上不相关;
随机游走(Random Walk)估计:方差随更新间隔而增大。在该估计模型中取过程噪声。
例如:
:一步状态转移矩阵
Q:系统噪声 w 的方差阵
R:观测噪声 v 的方差阵,可通过信噪比模型、等权模型、高度角模型确定
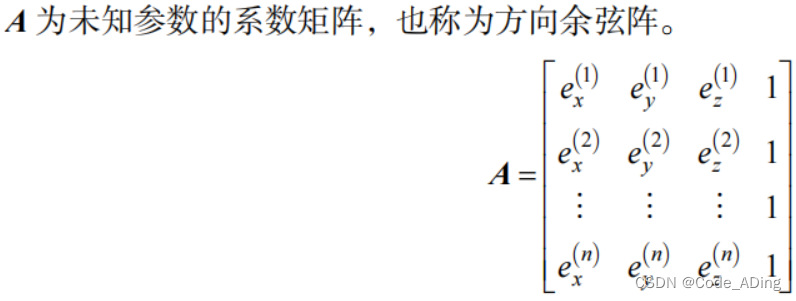
H:观测矩阵、系数矩阵、方向余弦阵
L:常数项、自由项
:动态噪声矩阵
:动态噪声(下文有说如何取值,一般都是取经验值)
关于过程噪声和观测噪声,可看该文:一文详解卡尔曼滤波两处噪声的来源及影响_卡尔曼滤波过程噪声q怎么确定-CSDN博客


当观测的可见卫星多于 4 颗时,组成观测误差方程为:L = AX + V
![]()
上述式子就是卡尔曼滤波的观测方程

提一点:在最小二乘法中,观测方程为:V = AX - L , 最小二乘法中观测方程中各参数的含义为:
可知,卡尔曼滤波中的 V 与最小二乘中的 V 绝对值相等,符号相反,需要加负号。
再回到卡尔曼滤波方法中:
对于静态的伪距定位,系统的状态转移矩阵可采用单位矩阵:
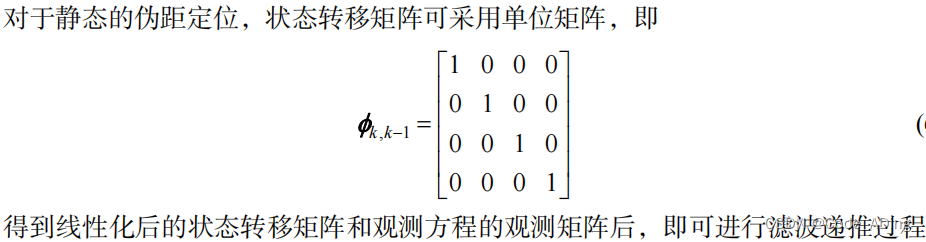
对于动态的定位过程(涉及速度、加速度),状态转移矩阵就有所变化,因为涉及速度。
滤波递归过程的具体过程如下:
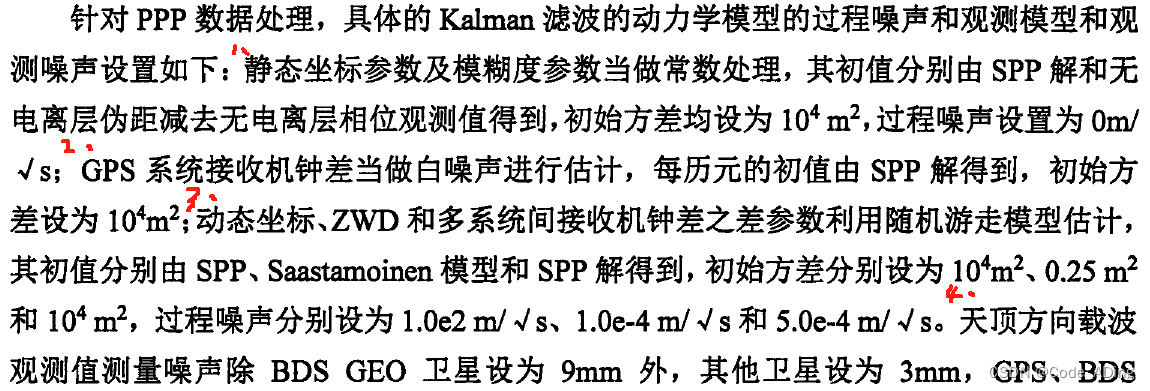
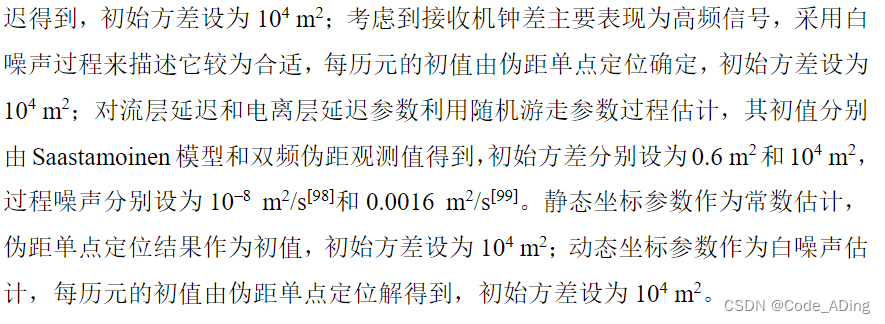
在精密单点定位过程中,主要参数的初始方差主要来自于SPP(标准单点定位)、过程噪声的设置如下:
各大待求参数的初始方差应该是属于 P 中的值,过程噪声?白噪声估计?随机游走模型估计?

(1)计算预报值及其方差
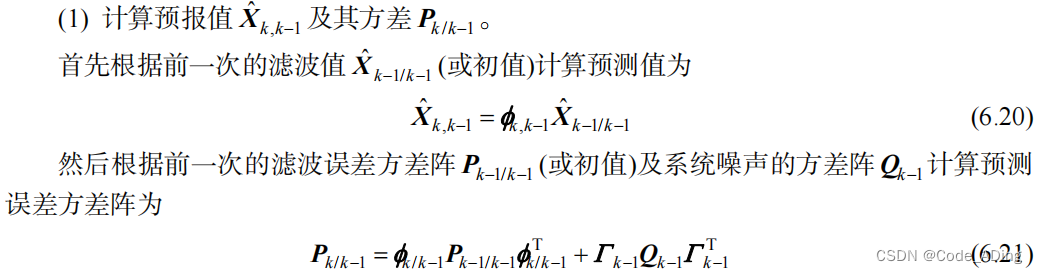
误差-协方差阵的初始值P是怎么设置的? P 也就是状态向量的方差-协方差阵,取自各代求参数的方差设置,不同的待求参数初始方差的设置及模型略有不同(还包括白噪声估计模型、随机游走模型估计)。
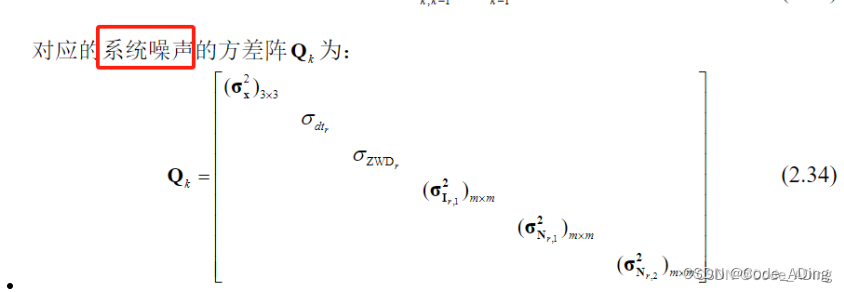
系统噪声的方差阵 Q 是一个已知的非负矩阵,系统噪声的方差阵就是各种待求参数的系统噪声,通过根据经验取初始值,如下图所示(下图是PPP过程中系统噪声的方差阵 Q 的处理方法):
白噪声过程?随机游走参数过程?过程噪声?
下面的初始方差的设置是放在 方差-协方差矩阵 P 中。

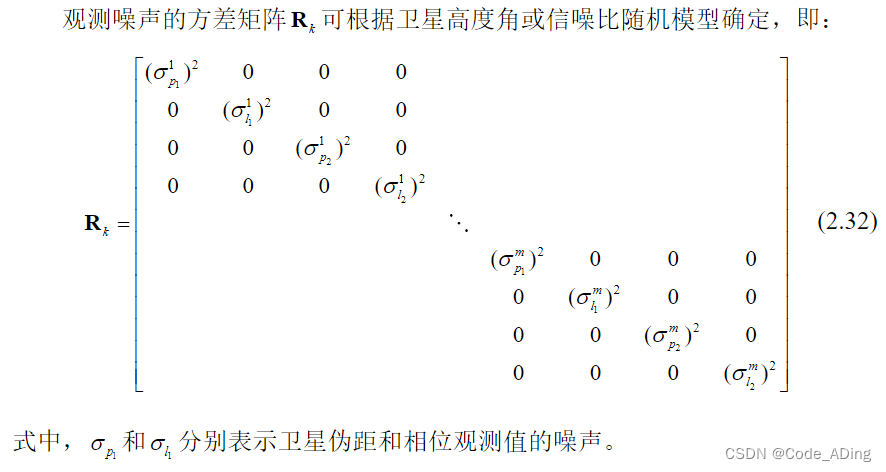
观测噪声矩阵 R 是一个已知的正定矩阵,观测噪声矩阵 R 即观测值(伪距和载波相位)的噪声(或者称为方差矩阵),可根据卫星高度角或信噪比模型确定,如下图所示:
(2)计算增益矩阵

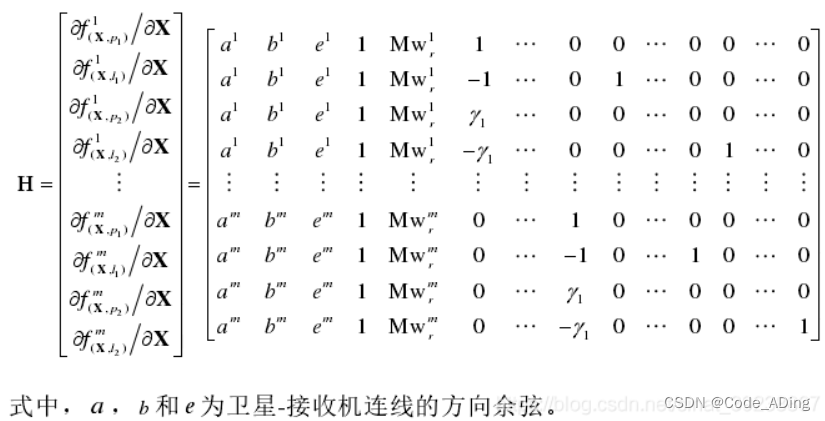
H 也就是观测矩阵、系统矩阵、设计矩阵,即前面所说的 A 矩阵,也称方向余弦阵,如下图所示:
参数只有接收机的位置改正数和接收机钟差:
对于精密单点定位 PPP 来说:增加了电离层延迟、对流层湿延迟、整周模糊度参数
(3)计算滤波估计值和方差阵
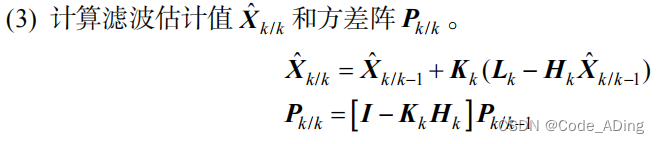
I:单位矩阵,对角线元素全为 1 ,其余为 0
L:自由项、常数项,前面有提及
(4)根据计算得到的k时刻修正值,即可对接收机位置和钟差进行修正
得到 k 时刻修正值,即可对接收机位置进行修正
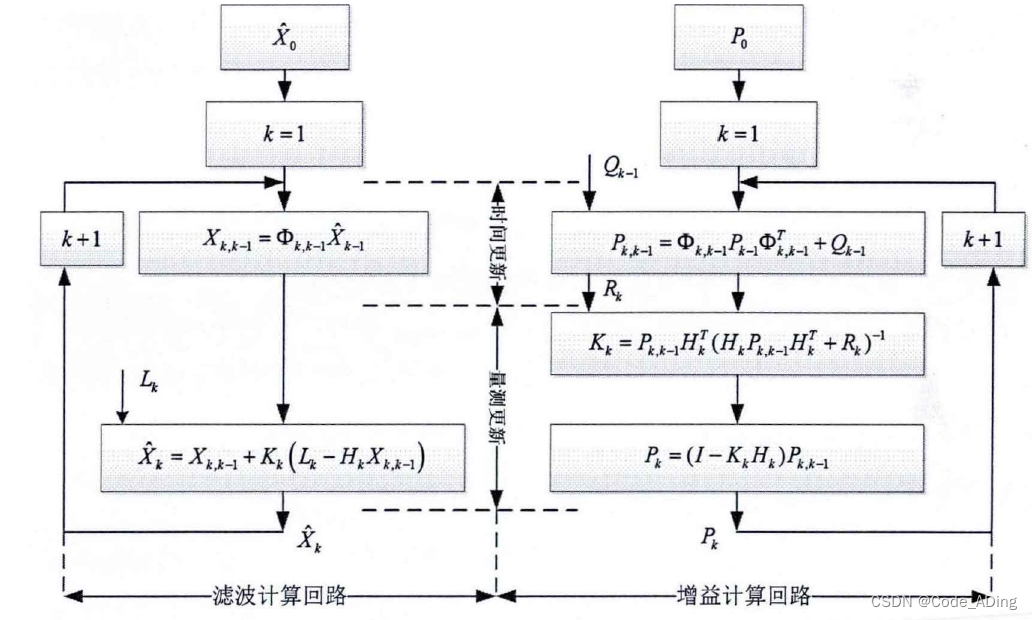
2.标准Kalman滤波递推流程图

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 32
32 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)