【芯片应用】DAC8554
性质:数模转换器生厂商:TI(德州仪器)分辨率:16位通道数量:4相对精度:±4LSB输出阻抗:1Ω电源电压(AVDD):2.7V~5.5V参考电压(VREF):0~AVDD输出电压:0~VREF
一、简介
性质:数模转换器
生厂商:TI(德州仪器)
分辨率:16位
通道数量:4
相对精度:±4LSB
输出阻抗:1Ω
电源电压(AVDD):2.7V~5.5V
参考电压(VREF):0~AVDD
输出电压:0~VREF
数据手册可点击链接免费下载:DAC8554 Datasheet
二、硬件
1、芯片引脚
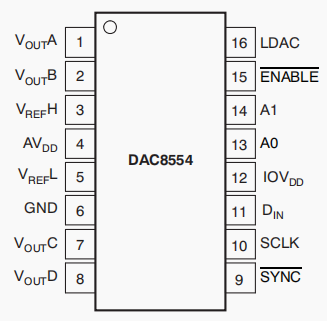
| 序号 | 引脚名称 | 描述 |
|---|---|---|
| 1 | VOUTA | 电压输出通道A |
| 2 | VOUTB | 电压输出通道B |
| 3 | VREFH | 正参考电压 |
| 4 | AVDD | 电源电压 |
| 5 | VREFL | 负参考电压 |
| 6 | GND | 地 |
| 7 | VOUTC | 电压输出通道C |
| 8 | VOUTD | 电压输出通道D |
| 9 | SYNC | 低电平时开始传输数据 |
| 10 | SCLK | 时钟,最高50MHz |
| 11 | DIN | 数据输入 |
| 12 | IOVDD | 数字电路电源 |
| 13 | A0 | 地址设置位 |
| 14 | A1 | 地址设置位 |
| 15 | ENABLE | 低电平使能SPI |
| 16 | LDAC | 加载DAC寄存器,上升沿触发 |
DAC8554提供了两种数据同步更新功能,包括软件和硬件。
软件更新即用LD0/LD1控制更新方式,这时LDAC用不上,永久接地就好了;
硬件更新用LDAC控制,将数据存入缓冲器,随着LDAC从低变高,所有通道将一步更新到位。
2、芯片原理
芯片内部框图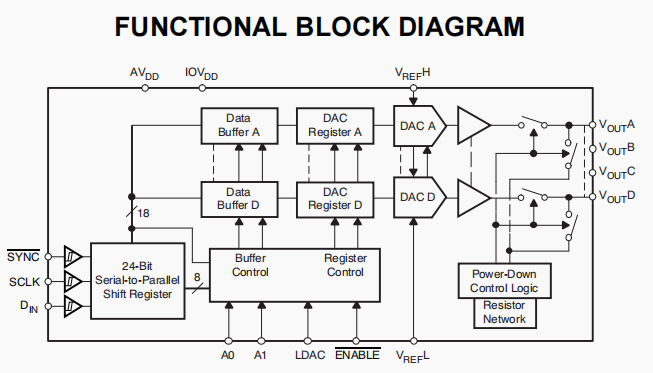
可以看到芯片采用两级缓冲结构(Data Buffer ->DAC Register),这样的结构有4组,分别对应四个通道。从DIN输入的数据首先进入24位移位寄存器,然后进入缓冲器buffer,最后进入DAC寄存器,经过运放处理才得到最终电压。
DAC8554属于开关树形DA转换器,关于它的原理可查看【数电】DAC。
其内部结构如下图所示: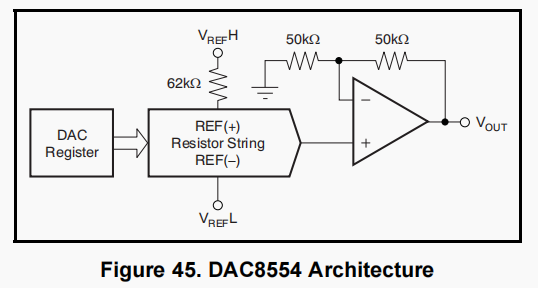
其中电阻串结构如下所示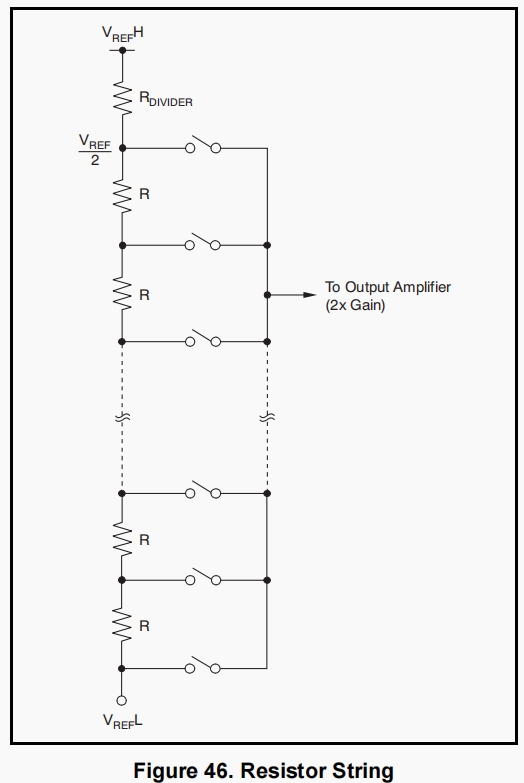
电阻串顶端接VREF_H,底端接VREF_L,经过65536个电阻R和一个电阻R_DIVIDER分压,且
R D I V I D E R = 65536 ∗ R R_{DIVIDER}=65536*R RDIVIDER=65536∗R
将分压信号输入给同向放大器,由
V o V i = 1 + R 2 R 1 \frac{Vo}{Vi}=1+\frac{R2}{R1} ViVo=1+R1R2
得到放大器增益为2.
故最终输出电压为:
V o u t = 2 ∗ ( V R E F L + ( V R E F H − V R E F L ) / 2 65536 ∗ D I N ) Vout=2*(V_{REF}L+\frac{(V_{REF}H-V_{REF}L)/2}{65536}*D_{IN}) Vout=2∗(VREFL+65536(VREFH−VREFL)/2∗DIN)$$
电阻串电路中,每次只会有一个开关导通!
2、电路设计
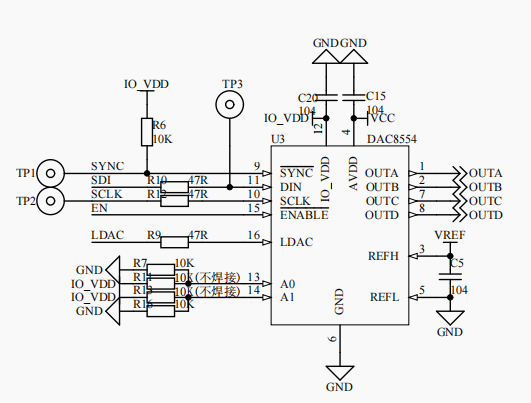
(1)正参考电压接5V(由REG195G提供),负参考电压接地
(2)地址位为00
(3)ENABLE永久接地
为什么要接47电阻?
三、软件
1、时序图
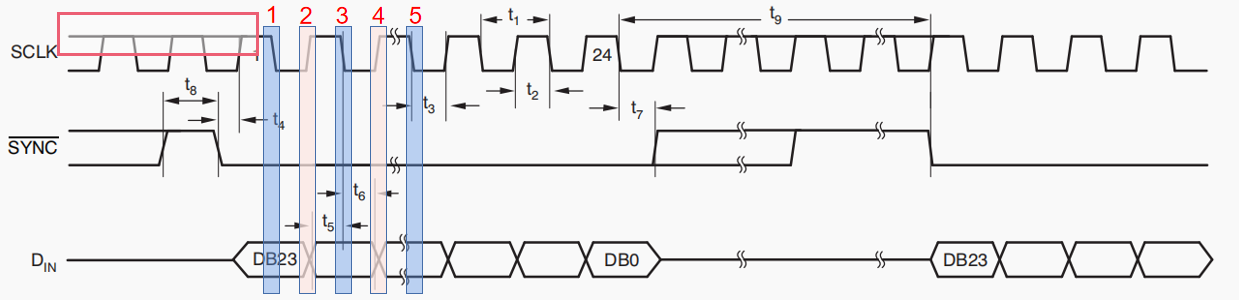
采用3线制串行接口,可兼容SPI通讯协议。
将SYNC拉低,写时序开始。
在SCLK每个下降沿,DIN上数据被存入24位移位寄存器。
在24个数据写入过程中,如果SYNC拉高,则数据写入失败,之前写入的数据将丢弃。
从图中可以看出,总线空闲状态下,SCLK为1,故CPOL=1。
从图中可以看出,在第1、3、5个边沿进行数据采样,故CPHA=0。
SPI可采用模式2与DAC8554通讯。
2、片内寄存器

输入移位寄存器一共有24位,其中高8位为控制位,低16位为数据位.
A1/A0:地址位,可使一个主机最多控制4个DAC8554共16个通道的芯片,写入A1A0的地址必须与硬件设置的地址相同。LD1/LD0:加载模式控制,使用指定的 16 位数据值或掉电命令控制每个模拟输出的更新。
| LD1 | LD0 | 模式 | 描述 (请结合芯片内部结构框图阅读) |
|---|---|---|---|
| 0 | 0 | 单通道存储模式 | 被选中的DAC通道的缓冲器加载输入移位寄存器中的数据,或者加载掉电模式命令 |
| 0 | 1 | 单通道更新模式 | 被选中的DAC通道的缓冲器和DAC寄存器加载输入移位寄存器中的数据,或者加载掉电模式命令 |
| 1 | 0 | 同步更新模式 | 选中通道从移位寄存器中更新数据,同时其他通道从缓冲器中更新之前的数据 |
| 1 | 1 | 广播更新模式 | 不管地址是否匹配,挂载的所有DAC8554都会响应。若DAC Select1=0,则所有通道更新缓冲器中保存的数据;若DAC Select1=1,则所有通道更新移位寄存器中保存的数据 |
数据存储进缓冲器还不会有对应电压输出,必须加载进入DAC寄存器才会
X:略DAC Select1/2:选择通道,A(00)/B(01)/C(10)/D(11)PD0:选择掉电模式。若PD0=1,D15和D14将表示掉电模式: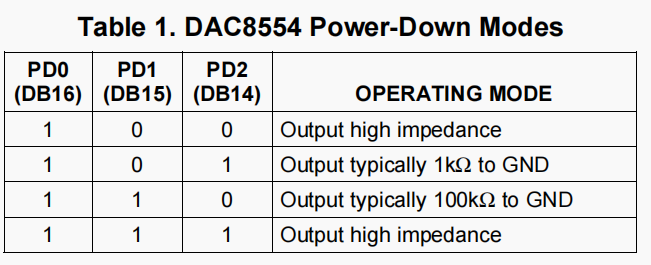
从表中可以看出,不同的掉电模式有不同的输出阻抗。
3、程序编写
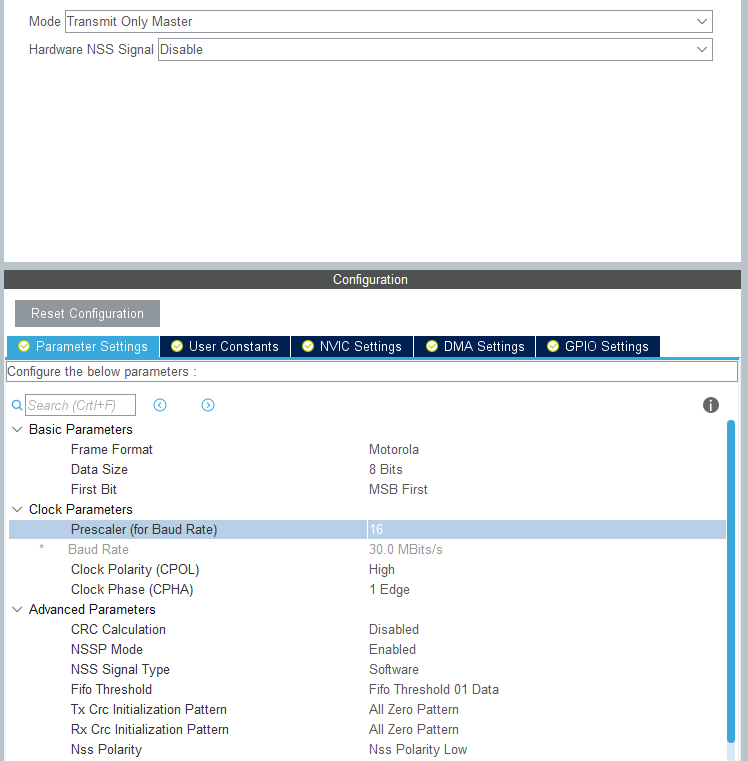
使用SPI模式2与DAC8554通讯,即CPOL=1,CPHA=0。由于DAC8554最高通讯速率为50MHz,故这里设置为30M。
初始化函数
void MX_SPI2_Init(void)
{
hspi2.Instance = SPI2;
hspi2.Init.Mode = SPI_MODE_MASTER;
hspi2.Init.Direction = SPI_DIRECTION_2LINES_TXONLY;
hspi2.Init.DataSize = SPI_DATASIZE_8BIT;
hspi2.Init.CLKPolarity = SPI_POLARITY_HIGH;
hspi2.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi2.Init.NSS = SPI_NSS_SOFT;
hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;
hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi2.Init.TIMode = SPI_TIMODE_DISABLE;
hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi2.Init.CRCPolynomial = 0x0;
hspi2.Init.NSSPMode = SPI_NSS_PULSE_ENABLE;
hspi2.Init.NSSPolarity = SPI_NSS_POLARITY_LOW;
hspi2.Init.FifoThreshold = SPI_FIFO_THRESHOLD_01DATA;
hspi2.Init.TxCRCInitializationPattern = SPI_CRC_INITIALIZATION_ALL_ZERO_PATTERN;
hspi2.Init.RxCRCInitializationPattern = SPI_CRC_INITIALIZATION_ALL_ZERO_PATTERN;
hspi2.Init.MasterSSIdleness = SPI_MASTER_SS_IDLENESS_00CYCLE;
hspi2.Init.MasterInterDataIdleness = SPI_MASTER_INTERDATA_IDLENESS_00CYCLE;
hspi2.Init.MasterReceiverAutoSusp = SPI_MASTER_RX_AUTOSUSP_DISABLE;
hspi2.Init.MasterKeepIOState = SPI_MASTER_KEEP_IO_STATE_DISABLE;
hspi2.Init.IOSwap = SPI_IO_SWAP_DISABLE;
if (HAL_SPI_Init(&hspi2) != HAL_OK)
{
Error_Handler();
}
}
写移位寄存器函数
/**********************************************************************
* 名称 : DAC_Write_Reg
* 功能 : DAC 写数据寄存器函数
* 输入 : Addr -- 地址
nCH -- 通道
DAC_Code -- DAC内码
* 输出 :无
* 说明 : 无
***********************************************************************/
void DAC_Write_Reg(uint8_t Addr,uint8_t nCH,uint16_t DAC_Code)
{
uint8_t CMD = 0x00;
uint8_t dac_code[2];//将16位数据存储在数组中
dac_code[0]=DAC_Code >> 8;//高位先行
dac_code[1]=DAC_Code >> 0;
//采用硬件进行数据更新
HAL_GPIO_WritePin(GPIOC, LDAC_Pin, GPIO_PIN_RESET); //LDAC = 0(上升沿加载DAC)
//1.设置命令
CMD = CMD | (Addr << 6); //设置地址(A1/A0)
CMD = CMD | (nCH << 1); //设置输出通道(SEL1/SEL0)
//2.写入DAC数据
HAL_GPIO_WritePin(SPI2_SYNC_GPIO_Port, SPI2_SYNC_Pin, GPIO_PIN_RESET);//SYNC = 0,开始写入
HAL_SPI_Transmit(&hspi2, &CMD, 1, 1000);
HAL_SPI_Transmit(&hspi2, dac_code, 2, 1000);
HAL_GPIO_WritePin(SPI2_SYNC_GPIO_Port, SPI2_SYNC_Pin, GPIO_PIN_SET);//SYNC = 1,结束写入
HAL_GPIO_WritePin(GPIOC, LDAC_Pin, GPIO_PIN_SET);//LDAC = 1,上升沿完成DAC加载
}
翻译函数
/**********************************************************************
* 名称 : DAC_Translate
* 功能 : 将目标电压翻译为DAC内码,支持分辨率0.076mV
* 输入 : nCH -- 通道
Votage -- 电压值
* 输出 :无
* 说明 : 1.输出范围:0 <= Votage <= +VREF
2.关于校正系数DAC_Coeff,当DAC输出存在线性误差时可通过校正系数
来修正输出值,假如设定值位Vset = 2.5V,实际Vout= 2.485V
此时的校正系数为DAC_Coeff = Vset÷ Vout = 1.006f
***********************************************************************/
void DAC_Translate(uint8_t nCH,float Votage)
{
uint16_t r_Value = 0x0000; //寄存器数据
r_Value = (uint16_t)((float)CODE_MAX * Votage * DAC_Coeff / DAC_VREF); //计算DAC内码
DAC_Write_Reg(DAC_ADDR,nCH,r_Value);//写入数据
}

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 8
8 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)