一种传送带跟踪方法实现
一种传送带跟踪实现方法。
一、什么是传送带跟踪?

传送带跟踪通常用于食品和包装行业。典型的应用有:跟踪巧克力、糖果、面包将其放进盒子内,或者摆放在一起。传送带不停的运动,根据机器视觉给出的位置信息,引导机器人进行抓取任务。下图是一个示意图: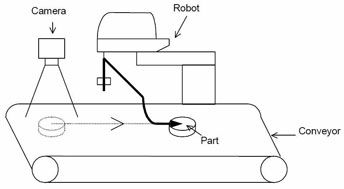
待抓取的物体part经过相机拍照处理后,随着传送带带到机械手抓取范围内,机器人将会抓取物体并将其放到指定位置。
二、传送带跟踪过程
视觉系统拍照的目的是为了给出工件在机械手坐标系下的瞬时位置,此时机械手可能尚未进入可抓取区域,机械手需要等待工件进入并进行抓取,同步阶段是为了保证物体已经被抓起,最后机械手将会完成抓取并放置的动作。
三、抓取策略
传送带速度如何设置?
- 如果工件比较密集,机械手可能会出现“漏抓”现象,适当降低传送带速度可以避免;
- 如果工件比较稀疏,机械手可能会出现“偷懒”现象,适当提升传送带速度可以避免;
3.1 PID式抓取策略
这一种形式机械手的目标位置实时刷新,使得机械手末端速度与皮带速度完全一致即可完成抓取。
3.2 位置预测策略
这个策略简单来说,就是在工件运行方向找到一个点,这个点使得机械手到该点的时间恰好等于传送带到该点的时间。如何寻找这个点是策略的主要目的,抓取点求取过程如下(注意这是建立在机械手坐标系XXX轴和皮带运动方向同向的基础上的)。
工件进入视觉系统瞬间,相机将会给出此刻工件位置PPP,经过t1t_1t1时间后,相机将会到达点MMM,设传送带速度恒定,大小为VVV,则有:
t1=PMV t_1=\frac{PM}{V} t1=VPM
再来看机械手的运动,假设此时机械手的位置为SSS,经过t2t_2t2时间机械手末端到同一个点MMM,所以有:
t2=f(SM) t_2=f(SM) t2=f(SM)
fff计算规划时间的函数,如果t1=t2t_1=t_2t1=t2,此时的MMM就是抓取点:
PMV−f(SM)=0 \frac{PM}{V}-f(SM)=0 VPM−f(SM)=0
MMM点的坐标为(xm,ym)(x_m,y_m)(xm,ym),PPP点的坐标为(xp,yp)(x_p,y_p)(xp,yp),因为传送带运动方向为“纯”XXX方向,所以有:
M=(xm,yp) M=(x_m,y_p) M=(xm,yp)
显然PMPMPM是一个关于数xmx_mxm的方程,同理SMSMSM亦是如此。设他们之间的关系为PM=g(xm)SM=h(xm)PM=g(x_m)\quad SM=h(x_m)PM=g(xm)SM=h(xm),进而:
g(xm)V−f[h(xm)]=0 \frac{g(x_m)}{V}-f[h(x_m)]=0 Vg(xm)−f[h(xm)]=0
再抽象一下:
t(xm)=0 t(x_m)=0 t(xm)=0
求抓取点问题转换成求上述方程的零点,求零点的方法可以通过二分法计算,假设抓取的上限为UUU,抓取的下限制为DDD,计算流程如下: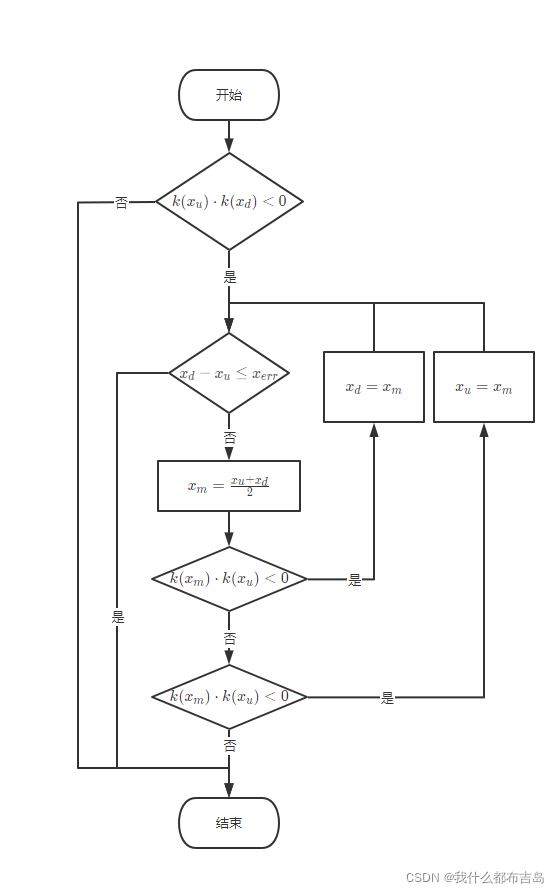
首先检查再指定上下游是否有解,如果没有解,直接退出循环;如果有解,根据二分法求出解的范围,每次求解的时候需要判断是否满足我们的误差要求xerrx_{err}xerr,如果不满足继续二分,如果满足退出循环,此时的xdx_dxd或者xux_uxu为所求抓取点的位置。
[1]王铮, 戴坚锋, 钱振宇,等. 面向传送带作业系统的机器人目标跟踪与抓取策略研究[J]. 计算机测量与控制, 2016, 24(11):6.

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 6
6 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)