数字信号处理1:卷积
文章目录一、前言二、线性时不变(LTI)系统三、冲激函数四、阶跃函数五、卷积数字信号处理是音视频开发所必不可少的一项技能,我会从本篇开始,开启一系列入门文章,分享关于数字信号处理方面的知识。这只是一个精简的知识提炼,供大家进行入门,也是对自己的一个备忘和学习笔记。难免会有纰漏,要深入的同学请务必去看一些经典教材。一、前言数字信号处理我们日常生活中其实会经常接触到,像音频、视频、机械控制等...
数字信号处理是音视频开发所必不可少的一项技能,我会从本篇开始,开启一系列入门文章,分享关于数字信号处理方面的知识。这只是一个精简的知识提炼,供大家进行入门,也是对自己的一个备忘和学习笔记。难免会有纰漏,要深入的同学请务必去看一些经典教材。
文章以 * 来表示乘法,以 ⊗ 表 示 卷 积 \otimes表示卷积 ⊗表示卷积
一、前言
数字信号处理我们日常生活中其实会经常接触到,像音频、视频、机械控制等等。简单来说就是一个信号 x x x,通过系统 S S S后输出信号 y y y,系统 S S S需要对信号进行处理,比如滤除噪音、调节频率等等。数字信号处理讲的就是对 x x x进行操作的学问。
二、线性时不变(LTI)系统
一般我们说数字信号处理都是基于线性时不变(LTI)系统,那么什么是LTI系统呢?顾名思义
1. 线性: 这个线性其实就是我们所用的线性方程中的那个概念,满足叠加定理,比如 x 1 → y 1 x_1 \rightarrow y1 x1→y1是一个映射(也就是我们常说的函数关系)。假设有 x 2 = a x 1 x_2 = ax_1 x2=ax1,经过同样的映射 x 2 → y 2 x_2 \rightarrow y_2 x2→y2,那么 y 2 = a y 1 y_2 = ay_1 y2=ay1。
2. 时不变: 这个就更好理解了。同样一个输入信号,任何时候的输出都是一样的。
三、冲激函数
冲激函数是指在0点上有值,而在其他地方均为0的函数。通常使用 δ \delta δ表示。
连续形式:
δ ( t ) = { + ∞ t = 0 0 t ≠ 0 \delta(t) = \begin{cases} +\infty & t = 0\\ 0 & t \neq 0 \end{cases} δ(t)={+∞0t=0t=0
上面的式子比较抽象,其实它只有一个定义,就是在负无穷到正无穷的积分是1。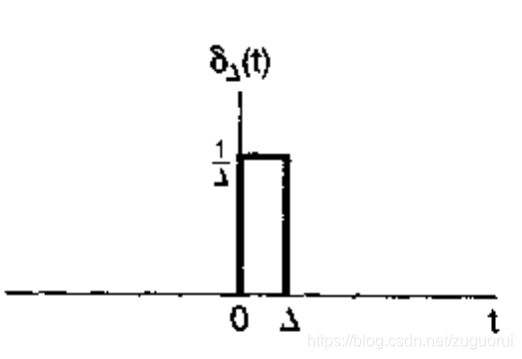
离散形式:
δ [ n ] = { 1 n = 0 0 n ≠ 0 \delta[n] = \begin{cases} 1 & n = 0\\ 0 & n \neq 0 \end{cases} δ[n]={10n=0n=0
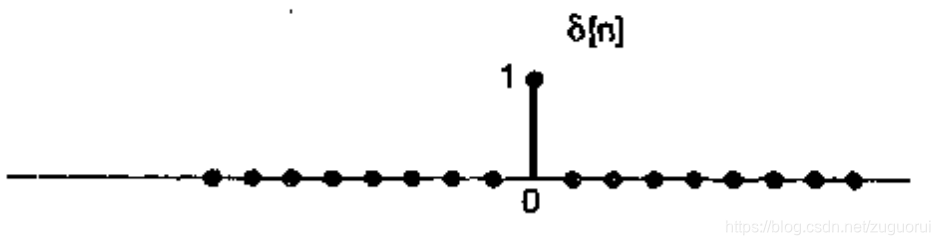
它们各有一些性质,不过我们马上使用的是一些直观上的数学性质。
需要说明的一点,之后我们推导的很多公式都会以连续信号和离散信号的形式。连续信号我们以 x ( t ) x(t) x(t)表示,离散信号我们以 x [ n ] x[n] x[n]表示
四、阶跃函数
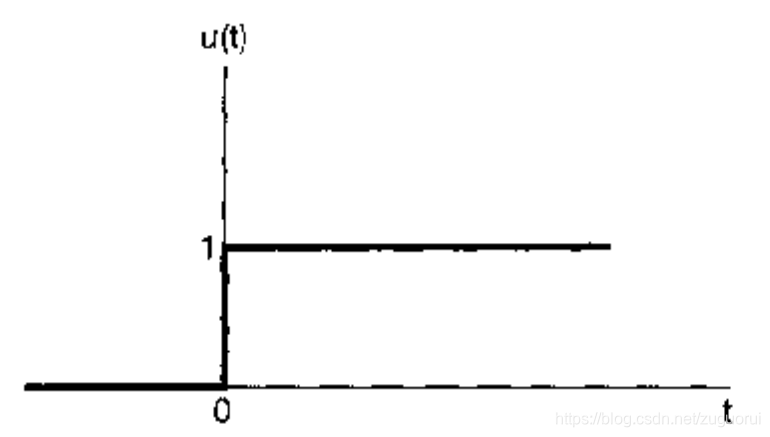
阶跃函数是从0开始到正无穷都为1,从负无穷到0都为0的函数。
连续形式:
u ( t ) = { 1 t > 0 0 t < 0 u(t) = \begin{cases} 1 & t > 0\\ 0 & t < 0 \end{cases} u(t)={10t>0t<0
需要注意的是,阶跃函数在t=0这一点是不连续的。
连续的阶跃函数和冲激函数有这么一层关系,从上面讲的连续冲击函数的定义,就可以得出
u ( t ) = ∫ − ∞ t δ ( τ ) d τ u(t) = \int^{t}_{-\infty}\delta(\tau)d\tau u(t)=∫−∞tδ(τ)dτ
因为 δ ( t ) \delta(t) δ(t)在负无穷到正无穷的积分是1。那么 δ ( t ) \delta(t) δ(t)就是 u ( t ) u(t) u(t)的一阶微分。但上面也说过 u ( t ) u(t) u(t)在t=0时是不连续的,因此严格来说不是可导的。但如果将 u ( t ) u(t) u(t)认为是在一个很小的间隔 Δ \Delta Δ内从0上升到1的,那就不难理解了。而这种情况,其实在现实世界中才是真正常见的。
离散形式:
u [ n ] = { 1 n ≥ 0 0 n < 0 u[n] = \begin{cases} 1 & n \ge 0\\ 0 & n < 0 \end{cases} u[n]={10n≥0n<0
显然离散形式要简单多了。同连续形式,我们也可以得出离散的冲击函数和阶跃函数的关系。
u [ n ] = ∑ m = − ∞ n δ [ m ] u[n] = \sum_{m = -\infty}^{n}\delta[m] u[n]=m=−∞∑nδ[m]
u [ n ] u[n] u[n]是 δ [ n ] \delta[n] δ[n]的求和
或者
δ [ n ] = u [ n ] − u [ n − 1 ] \delta[n] = u[n] - u[n - 1] δ[n]=u[n]−u[n−1]
δ [ n ] \delta[n] δ[n]是 u [ n ] u[n] u[n]的差分。
从以上形式不难看出一个规律,离散的求和对应连续的积分,离散的差分对应连续的微分,这一点将会在记忆一些性质的时候特别有用。后面我们也将会更加深刻地体验到。
五、卷积
5.1 卷积的推导
让我们以离散信号举例,从上面的冲激函数和阶跃函数来推导。
设有一信号
x [ n ] = . . . + x [ − 2 ] + x [ − 1 ] + x [ 0 ] + x [ 1 ] + x [ 2 ] + . . . x[n] = ... + x[-2] + x[-1] + x[0] + x[1] + x[2] + ... x[n]=...+x[−2]+x[−1]+x[0]+x[1]+x[2]+...
由于我们是从数学上来推导,因此暂且不要关心信号的序号为什么会有负的。
由冲激函数的定义,我们可以稍稍变形
x [ i ] = x [ i ] ∗ δ [ n − i ] x[i] = x[i] * \delta[n - i] x[i]=x[i]∗δ[n−i]
因为当且仅当 i = n i = n i=n时 δ [ n − i ] = 1 \delta[n - i] = 1 δ[n−i]=1
那么
x [ n ] = . . . + x [ − 2 ] ∗ δ [ n + 2 ] + x [ − 1 ] ∗ δ [ n + 1 ] + x [ 0 ] ∗ δ [ n ] + x [ 1 ] ∗ δ [ n − 1 ] + x [ 2 ] ∗ δ [ n − 2 ] + . . . = ∑ k = − ∞ + ∞ x [ k ] ∗ δ [ n − k ] x[n] = ... + x[-2] * \delta[n + 2] + x[-1] * \delta[n + 1] + x[0] * \delta[n] + x[1] * \delta[n - 1] + x[2] * \delta[n - 2] + ...\\ =\sum_{k=-\infty}^{+\infty}x[k] * \delta[n-k] x[n]=...+x[−2]∗δ[n+2]+x[−1]∗δ[n+1]+x[0]∗δ[n]+x[1]∗δ[n−1]+x[2]∗δ[n−2]+...=k=−∞∑+∞x[k]∗δ[n−k]
设有一LTI系统对冲激信号 δ [ n ] \delta[n] δ[n]的响应为 h [ n ] h[n] h[n],称为冲激响应。由我们对LTI系统的定义,它是满足叠加性质的,也就是说,对于系统S,它的输入为 δ [ n ] \delta[n] δ[n],输出为 h [ n ] h[n] h[n],根据LTI的线性性质,就有
x [ i ] ∗ δ [ n − i ] → x [ i ] ∗ h [ n − i ] x[i] * \delta[n - i] \rightarrow x[i] * h[n - i] x[i]∗δ[n−i]→x[i]∗h[n−i]
此处我们把 x [ i ] x[i] x[i]看做了一个系数。
因此可以得出系统S对 x [ t ] x[t] x[t]的输出为
y [ n ] = ∑ k = − ∞ + ∞ x [ k ] ∗ h [ n − k ] = x [ n ] ⊗ h [ n ] y[n] = \sum_{k=-\infty}^{+\infty}x[k] * h[n-k]\\ =x[n] \otimes h[n] y[n]=k=−∞∑+∞x[k]∗h[n−k]=x[n]⊗h[n]
这便是卷积的定义。由此我们也能得出,只要知道了一个系统的冲激响应,那么就可以得出它对任意输入信号的输出。
需要区分 δ [ n ] \delta[n] δ[n]和 h [ n ] h[n] h[n]的区别,虽然 δ [ n ] \delta[n] δ[n]是一个冲激信号,只在一个时段有值,但它的响应 h [ n ] h[n] h[n]是一个普通的信号,有可能是任何形式的,但是绝大部分来说, h [ n ] h[n] h[n]都会持续一段时间。
这就好像有一台马达,你在很短的时间内给它电源,断掉之后它还会持续转一会儿。
类似于这样
当然,也有输入时冲激信号,输出也是冲激信号,就是
h [ n ] = K δ [ n ] h[n] = K\delta[n] h[n]=Kδ[n]
那么这样的系统我们称之为无记忆系统,当前的输出只和当前的输入有关。但现实世界中我们绝大多数都面对的是有记忆系统,当前的输出和之前的输入以及当前的输入有关。上面马达的例子还有图都是有记忆系统。
说到这个,系统还分为因果系统和非因果系统。因果系统是输出仅和之前以及目前的输入有关,而非因果系统是输出和之前、现在以及将来的输入有关。非因果系统实在太过诡异,以至于我目前还无法理解,也没遇到过。我们说的系统,都是因果系统。
5.2 LTI系统卷积的性质
5.2.1 交换律
∑ k = − ∞ + ∞ x [ k ] ∗ h [ n − k ] = x [ n ] ⊗ h [ n ] = h [ n ] ⊗ x [ n ] = ∑ k = − ∞ + ∞ h [ k ] ∗ x [ n − k ] \sum_{k=-\infty}^{+\infty}x[k] * h[n-k] = x[n] \otimes h[n] = h[n] \otimes x[n] = \sum_{k=-\infty}^{+\infty}h[k] * x[n-k] k=−∞∑+∞x[k]∗h[n−k]=x[n]⊗h[n]=h[n]⊗x[n]=k=−∞∑+∞h[k]∗x[n−k]
假设有 r = n − k r = n - k r=n−k
那么
∑ k = − ∞ + ∞ x [ k ] ∗ h [ n − k ] = ∑ r = − ∞ + ∞ h [ r ] ∗ x [ n − r ] = h [ n ] ⊗ x [ n ] \sum_{k=-\infty}^{+\infty}x[k] * h[n-k] = \sum_{r=-\infty}^{+\infty}h[r]*x[n - r] = h[n] \otimes x[n] k=−∞∑+∞x[k]∗h[n−k]=r=−∞∑+∞h[r]∗x[n−r]=h[n]⊗x[n]
5.2.2 分配律
x [ n ] ⊗ ( h 1 [ n ] + h 2 [ n ] ) = x [ n ] ⊗ h 1 [ n ] + x [ n ] ⊗ h 2 [ n ] x[n] \otimes (h_1[n] + h_2[n]) = x[n] \otimes h_1[n] + x[n] \otimes h_2[n] x[n]⊗(h1[n]+h2[n])=x[n]⊗h1[n]+x[n]⊗h2[n]
这个就更简单了,便不单独推导了。
用系统框图表示就是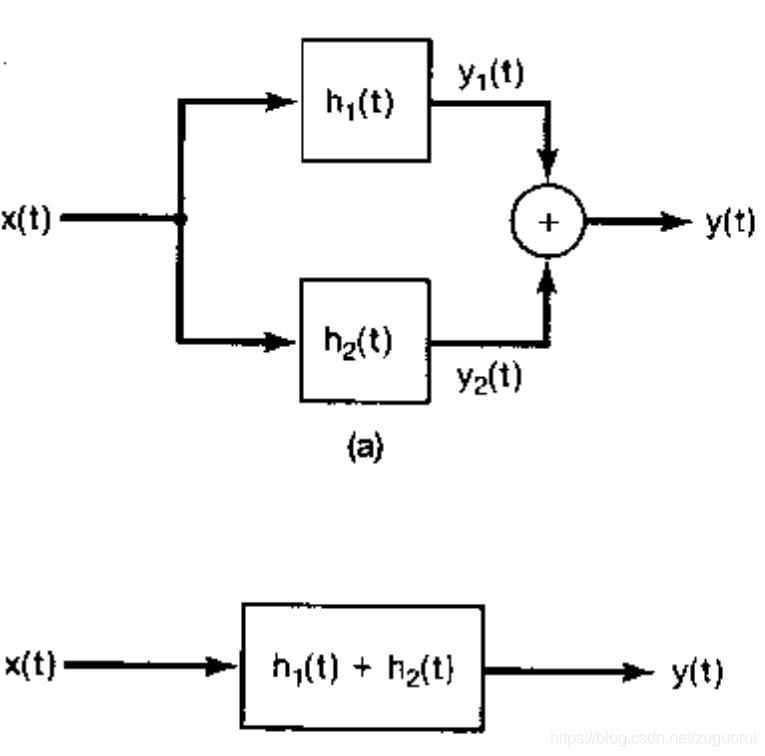
上下两个系统是等价的
5.2.3 结合律
x [ n ] ⊗ h 1 [ n ] ⊗ h 2 [ n ] = x [ n ] ⊗ h 2 [ n ] ⊗ h 1 [ n ] x[n] \otimes h_1[n] \otimes h_2[n] = x[n] \otimes h_2[n] \otimes h_1[n] x[n]⊗h1[n]⊗h2[n]=x[n]⊗h2[n]⊗h1[n]
这个需要从求和公式中推导,这里就不展开了,记住就好。
根据这个式子,有一个很重要的结论。
假设信号 x [ n ] x[n] x[n]先经过冲激响应为 h 1 [ n ] h_1[n] h1[n]系统S1,得到输出为 w [ n ] w[n] w[n],然后 w [ n ] w[n] w[n]经过冲激响应为 h 2 [ n ] h_2[n] h2[n]系统S2,得到最终输出 y [ n ] y[n] y[n]。那么它也等效于信号 x [ n ] x[n] x[n]先经过S2再经过S1。如下图。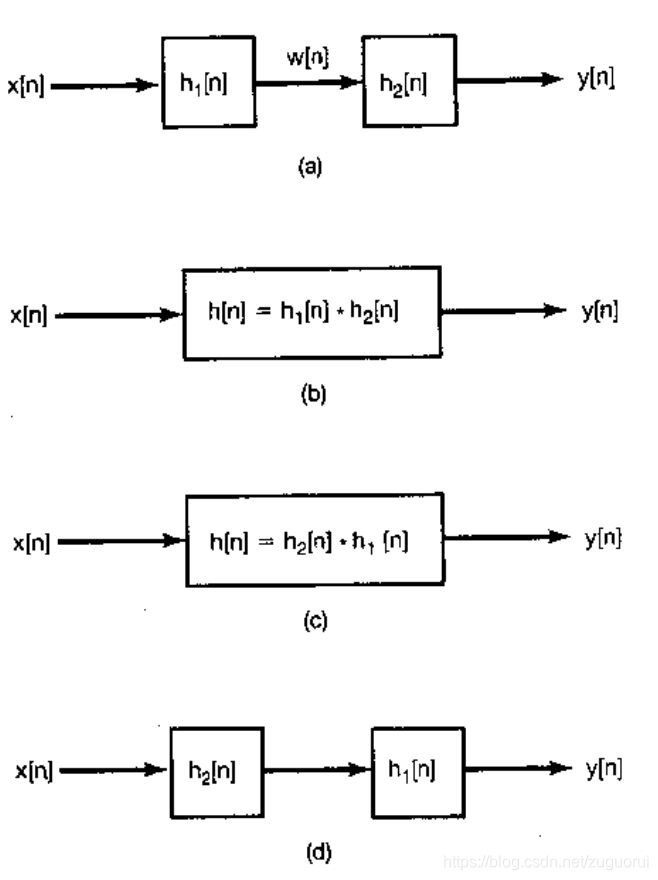
牢记以上的几条性质,对于系统设计会非常有用。
上面都是以离散信号举例,其实对于连续信号来说,也是一样的,只是把求和换成积分。
y ( n ) = ∫ − ∞ + ∞ x ( k ) ∗ h ( n − k ) d k = x ( n ) ⊗ h ( n ) y(n) = \int_{-\infty}^{+\infty}x(k) * h(n-k)dk\\ =x(n) \otimes h(n) y(n)=∫−∞+∞x(k)∗h(n−k)dk=x(n)⊗h(n)
由于我们目前将的都是数字信号处理,因此着重讲离散信号,连续信号都会跟着提一下。
至此,讲完了卷积的由来,下一篇我们讲一下傅里叶变换。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 12
12 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)