SINAMICS V90 PN 指导手册 第7章 EPOS 线性/模态轴 反向间隙补偿 软限位
通过设置机械参数,可建立实际运动部件和脉冲当量(LU)之间的关系内部位置设定值的单位为脉冲当量(LU)。所有后续位置设定值,相关速度值和加速度值在内部设定值位置模式下都以LU为单位。以滚珠丝杠系统为例,如系统有10mm/转(10000μm/转)的节距并且脉冲当量的分辨率为1μm(1LU=1μm),则一个负载转相当于10000LU(p29247=10000)如果p29247的值增加N倍,则p2542
设置机械系统
通过设置机械参数,可建立实际运动部件和脉冲当量(LU)之间的关系
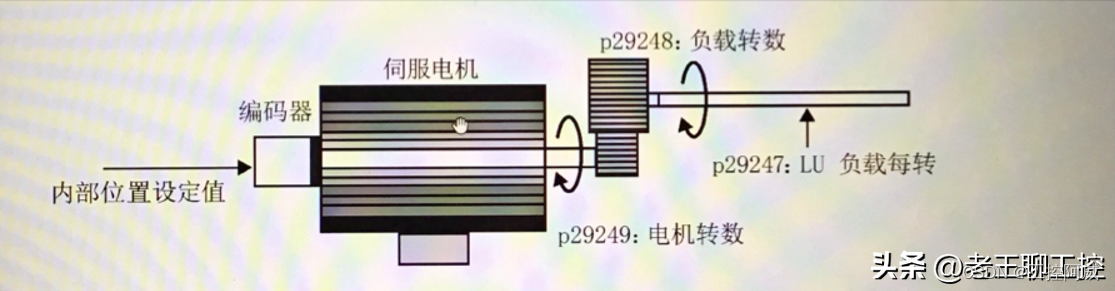
内部位置设定值的单位为脉冲当量(LU)。所有后续位置设定值,相关速度值和加速度值在内部设定值位置模式下都以LU为单位。
以滚珠丝杠系统为例,如系统有10mm/转(10000μm/转)的节距并且脉冲当量的分辨率为1μm(1LU=1μm),则一个负载转相当于10000LU(p29247=10000)
如果p29247的值增加N倍,则p2542、p2544和p2546的值也增加N倍。否则,产生故障F7450和F7452.
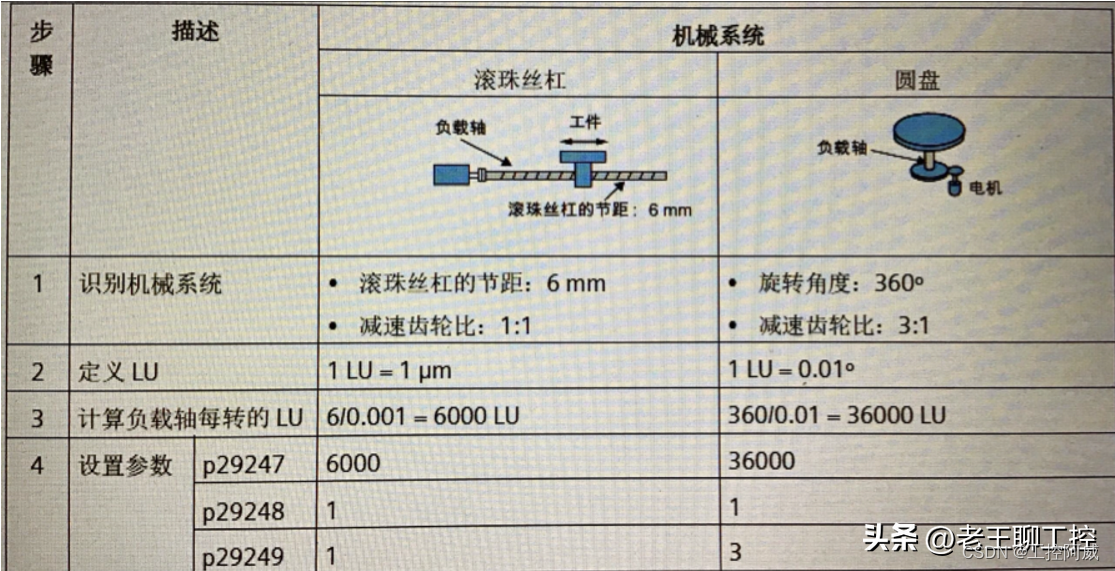
配置机械系统的示例
配置线性轴/模态轴
可根据实际情况选择使用线性轴或模态轴。线性轴有限定的运行范围,为SINAMICS V90伺服驱动的出厂设置。
模态轴没有限定的范围。位置的取值范围在p29246中指定值之后会重复。可通过设置以下参数使用模态轴:

注意:修改参数p29245后,必须重新执行回参考点操作
反向间隙补偿
通常,在运动的机械部件和驱动之间的力传递过程中会出现反向间隙:
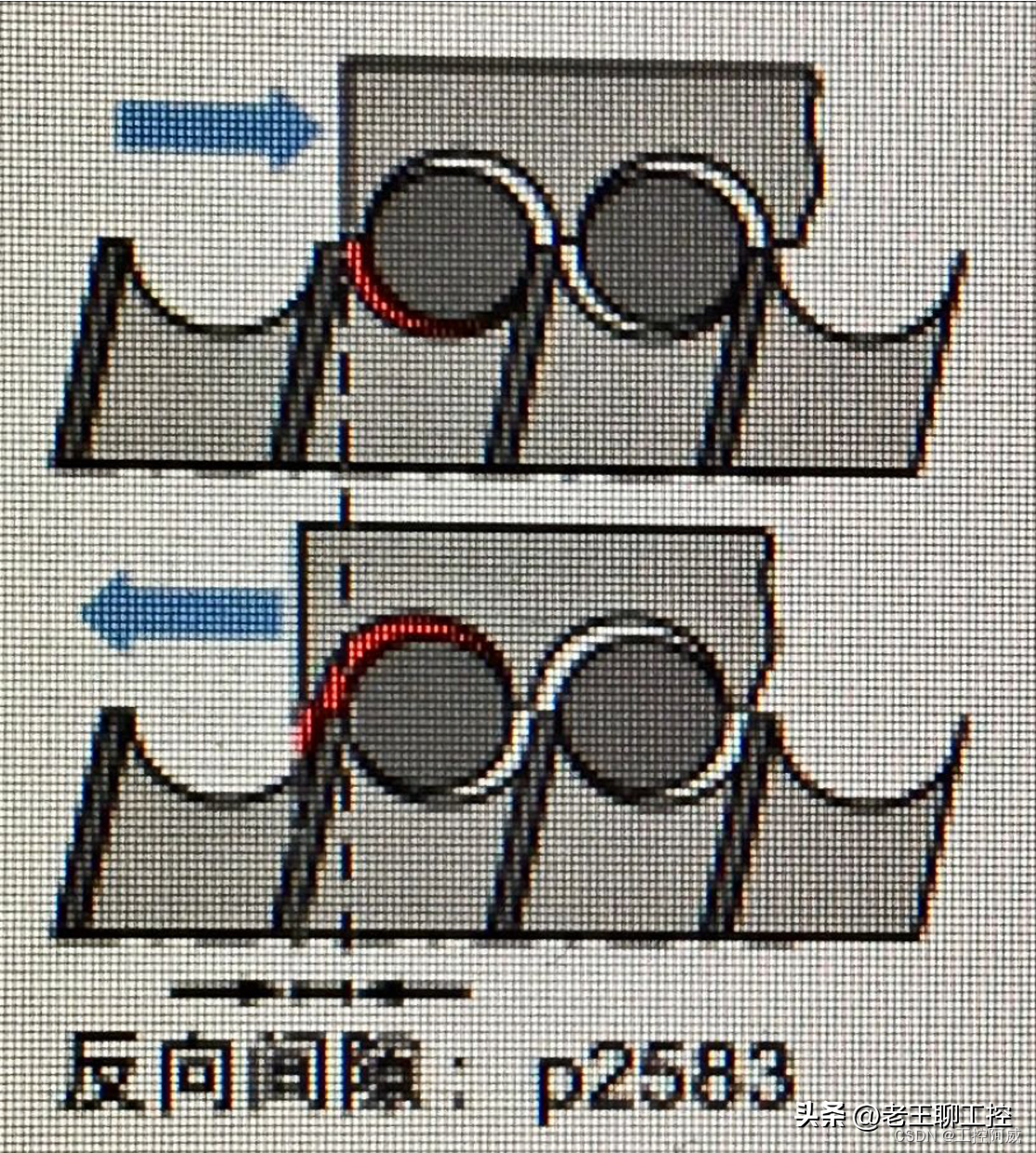
如果通过调整/设计机械系统,以完全消除反向间隙,则会导致机械部件过高的磨损,因此,为了降低机械部件的磨损,在机械部件和编码器之间必然会产生反向间隙。对于可进行辅助位置测量的轴来说,在轴正反向交替运行时,该间隙会导致轴位移量的增加或减少,使得轴的运动位移出错。
说明:反向间隙补偿激活的前提
- 轴已在增量测量系统中的回参考点
- 轴已在绝对测量系统中调整
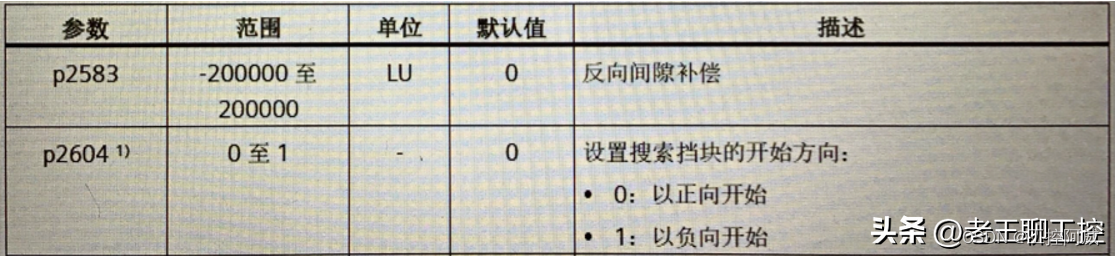
为补偿反向间隙,所确定的反向间隙及正确的极性必须在p2583中确定。每次旋转方向时,轴实际值需根据运行方向修正。如轴已回参考点或已调整,则p2604(回参考点开始方向)的设置可用来激活补偿值。
使用报文111时,p2604由控制字POS_STW2.9赋值
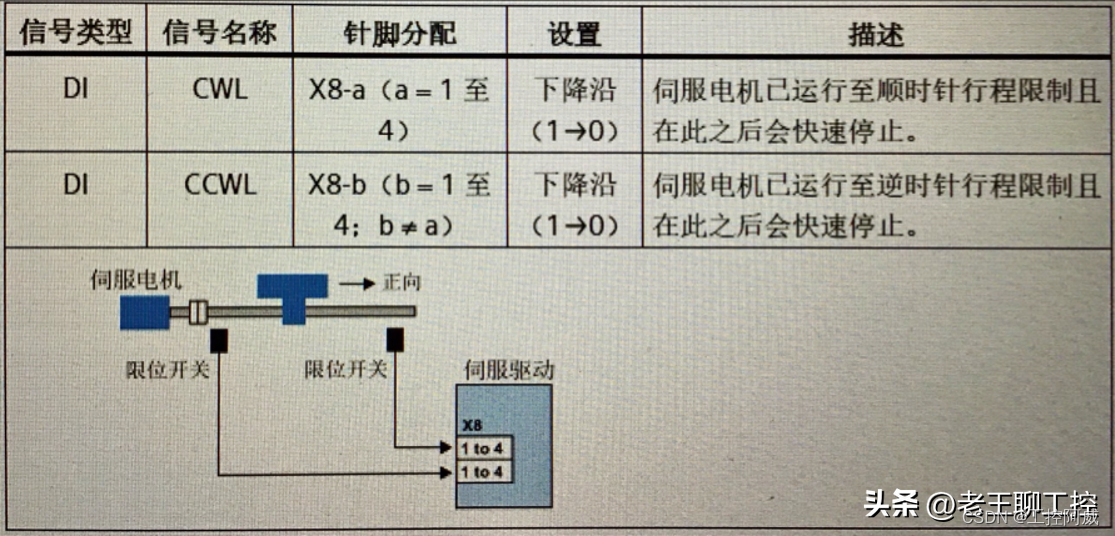
超行程
当伺服电机超行程运行时,限位开关会打开并且伺服电机快速停止。
使用报文111时,可通过PROFINET 控制字 POS_STW2.15设置超行程功能
POS_STW2.15=1//停止挡块激活;POS_STW2.15=0//停止挡块未激活
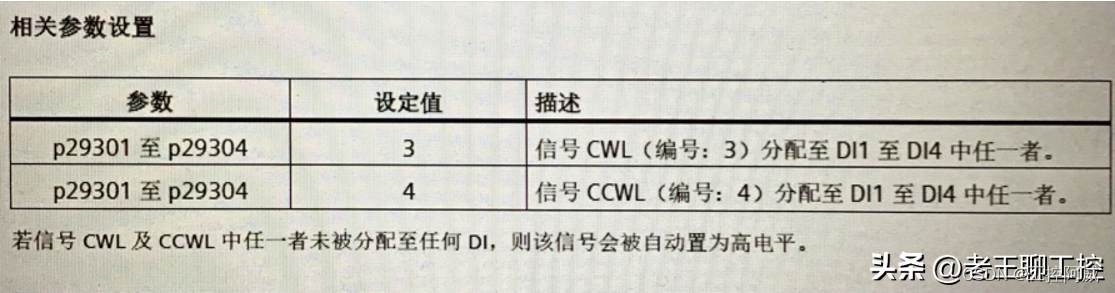
行程限位信号(CWL/CCWL)在EPOS控制模式下,在如下操作之后,电机正常运转:
- 当在正向运行方向上到达正向停止挡块从而触发F7492时,使用RESET信号应答故障,而后在负向运行方向上移动轴离开正向停止挡块,从而使轴返回到有效运行范围。
- 当在负向运行方向上到达正向停止挡块从而触发F7491时,使用RESET信号应答故障,而后在正向运行方向上移动轴离开正向停止挡块,从而使轴返回到有效运行范围。
说明:
- 当伺服驱动上电后,确保信号CWL和CCWL均处于高电平
- 在EPOS控制模式下,若仅应答故障而未将轴返回到有效运行范围内,则电机无法运转,并再次触发报警F7491/F7492
信号CWL为顺时针行程限制,而信号CCWL为逆时针行程限制。这两个信号均为电平和沿敏感信号
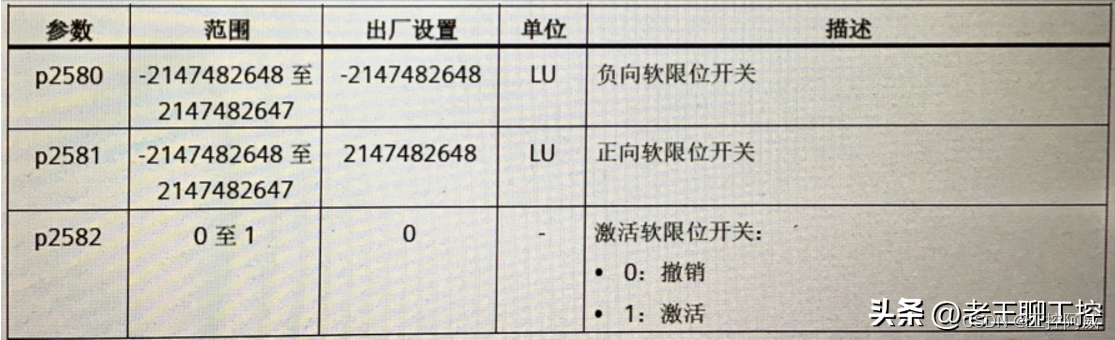
软限位
以下两个软限位在尼日不设定值位置控制模式下可用
- 正向软限位值
- 负限位
软限位功能仅在回参考点生效。实际位置到达上述软限位时,电机速度减速至0.使用报文111时,可通过PROFINET控制字POS_STW2.14 设置软限位功能
END

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 20
20 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)