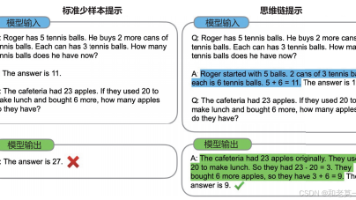
滑模控制在四旋翼上的应用举例(内含公式手推、simulink框图连接、代码编写)
本文以论文《Research on vertical air–water transmedia control of Hybrid Unmanned Aerial Underwater Vehicles based on adaptive sliding mode dynamical surface control》为例,复现了其中控制结果,并对其控制律的设计进行了公式推导
滑模控制在四旋翼上的应用举例
本文以Zongcheng Ma, Jinfu Feng, Jian Yang的论文《Research on vertical air-water trans-media control of Hybrid Unmanned Aerial Underwater Vehicles based on adaptive sliding mode dynamical sruface control》这篇文章为例,将文章中的结果进行部分复现,展示应用在四旋翼上的滑模控制。具体算法实施过程中可能会用到一部分自适应思想,但不影响理解,也欢迎大家参考笔者关于自适应的文章基于反步法backstepping的自适应控制简介,进一步了解自适应的思想。
1. 论文背景
该论文建立了如下场景:一四旋翼飞行器从固定高度开始下降,穿越水面,并进入到水下一定位置的过程。在入水过程中四旋翼受力复杂,因此需要较好的控制律进行控制。
本文只对高度通道 z z z和姿态通道 φ , θ , ψ \varphi, \theta, \psi φ,θ,ψ设计控制律,目的是在复现该论文过程中,更好地体会滑模控制的思想。由于四旋翼各个通道的耦合性,姿态控制需要得到较好结果后才能进行高度控制,因此在实际应用中往往把姿态控制当做内环,位置控制作为外环,设计复合控制器或级联控制器,这也是本文针对姿态控制和高度通知均设计控制律的原因。
2. 数学建模
设各变量为
η 1 = [ x y z ] T η 2 = [ φ θ ψ ] T V = [ u v w ] T ω = [ p q r ] T \begin{aligned} \eta _1 &= \left[ \begin{matrix} x & y & z \end{matrix} \right]^T \\ \eta_2 &= \left[ \begin{matrix} \varphi & \theta & \psi \end{matrix} \right]^T \\ V &= \left[ \begin{matrix} u & v & w \end{matrix} \right]^T \\ \omega &= \left[ \begin{matrix} p & q & r \end{matrix} \right]^T \end{aligned} η1η2Vω=[xyz]T=[φθψ]T=[uvw]T=[pqr]T其中 η 1 , η 2 \eta_1, \eta_2 η1,η2为地球坐标系下的物理量, V , ω V, \omega V,ω为机体坐标系下的物理量。(关于地球坐标系和机体坐标系可以参考文章Backstepping反步法控制四旋翼无人机(一))。
列出欧拉方程
{ m η ¨ 1 = F J ω ˙ + ω × J ω = M \begin{cases} m \ddot \eta _1 = F \\ J \dot \omega + \omega \times J \omega = M \end{cases} {mη¨1=FJω˙+ω×Jω=M
对于入水过程,该论文设计了一个临界区间 H H H,当无人机高度位于区间内时,作用于其上的浮力 f ( z ) f(z) f(z)、拉力系数 C 0 ( z ) C_0(z) C0(z)、总质量(包括机身质量和附加质量) m i ( z ) m_i (z) mi(z)、总转动惯量 J i ( z ) J_i(z) Ji(z)、均拥有不同形式:
f ( z ) = { 0 , z > H 2 ( H 2 − z ) m 0 g , − H 2 ≤ z ≤ H 2 m 0 g , z < − H 2 C 0 ( z ) = { 0 , z > H 2 ( H 2 − z ) c 0 , − H 2 ≤ z ≤ H 2 c 0 , z < − H 2 m i ( z ) = { m 0 , z > H 2 ( H 2 − z ) ( m 0 + λ i i ) , − H 2 ≤ z ≤ H 2 m 0 + λ i i , z < − H 2 J i ( z ) = { J i i , z > H 2 ( H 2 − z ) ( J i i + λ i i ) , − H 2 ≤ z ≤ H 2 J i i + λ i i , z < − H 2 \begin{aligned} f(z) = \begin{cases} 0, \quad z > \frac{H}{2} \\ \left( \frac{H}{2} - z \right) m_0 g, \quad - \frac{H}{2} \leq z \leq \frac{H}{2} \\ m_0 g, \quad z < - \frac{H}{2} \end{cases}\\ C_0(z) = \begin{cases} 0, \quad z > \frac{H}{2} \\ \left( \frac{H}{2} - z \right) c_0, \quad - \frac{H}{2} \leq z \leq \frac{H}{2} \\ c_0, \quad z < - \frac{H}{2} \end{cases} \\ m_i(z) = \begin{cases} m_0, \quad z > \frac{H}{2} \\ \left( \frac{H}{2} - z \right) \left( m_0 + \lambda_{ii} \right), \quad - \frac{H}{2} \leq z \leq \frac{H}{2} \\ m_0 + \lambda_{ii}, \quad z < - \frac{H}{2} \end{cases} \end{aligned}\\ J_i(z) = \begin{cases} J_{ii}, \quad z > \frac{H}{2} \\ \left( \frac{H}{2} - z \right) \left( J_{ii} + \lambda_{ii} \right), \quad - \frac{H}{2} \leq z \leq \frac{H}{2} \\ J_{ii} + \lambda_{ii}, \quad z < - \frac{H}{2} \end{cases} f(z)=⎩⎪⎨⎪⎧0,z>2H(2H−z)m0g,−2H≤z≤2Hm0g,z<−2HC0(z)=⎩⎪⎨⎪⎧0,z>2H(2H−z)c0,−2H≤z≤2Hc0,z<−2Hmi(z)=⎩⎪⎨⎪⎧m0,z>2H(2H−z)(m0+λii),−2H≤z≤2Hm0+λii,z<−2HJi(z)=⎩⎪⎨⎪⎧Jii,z>2H(2H−z)(Jii+λii),−2H≤z≤2HJii+λii,z<−2H
那么总的运动公式可以表示为
{ m 3 z ¨ 1 = U 1 cos φ cos θ − m 0 g + f ( z ) − C 0 z ˙ + d f + d k + d l J η ¨ 2 = Γ − C η ˙ 2 + d Γ (0) \begin{cases} m_3 \ddot z _1 = U_1 \cos \varphi \cos \theta - m_0 g + f(z) - C_0 \dot z + d_f + d_k + d_l \\ J \ddot \eta_2 = \Gamma - C \dot \eta_2 + d_{\Gamma} \tag{0} \end{cases} {m3z¨1=U1cosφcosθ−m0g+f(z)−C0z˙+df+dk+dlJη¨2=Γ−Cη˙2+dΓ(0)其中:
m 3 = m 0 + Δ m_3 = m_0 + \Delta m3=m0+Δ,第二项 Δ \Delta Δ为附加质量和未建模的干扰项的和;
Γ = [ U 2 U 3 U 4 ] T \Gamma = \left[ \begin{matrix} U_2 & U_3 & U4 \end{matrix} \right] ^ T Γ=[U2U3U4]T为控制向量;
C = l × d i a g ( K p , M q , N r ) C = l \times diag \left(K_p, M_q, N_r \right) C=l×diag(Kp,Mq,Nr)为科里奥利力;
d f , d k , d Γ d_f, d_k, d_\Gamma df,dk,dΓ分别为浮力线性化的误差、阻力线性化的误差、外部干扰。
3. 姿态控制器设计
设跟踪误差为
e η 2 = η 2 − η 2 d = [ φ θ ψ ] − [ φ d θ d ψ d ] \begin{aligned} e_{\eta_2} &= \eta_2 - \eta_{2d} \\ &= \left[ \begin{matrix} \varphi \\ \theta \\ \psi \end{matrix} \right] - \left[ \begin{matrix} \varphi_d \\ \theta_d \\ \psi_d \end{matrix} \right] \end{aligned} eη2=η2−η2d=⎣⎡φθψ⎦⎤−⎣⎡φdθdψd⎦⎤求二阶导
e ¨ η 2 = η ¨ 2 − η ¨ 2 d = J − 1 ( Γ − C η ˙ 2 + d Γ ) − η ¨ 2 d \ddot e_{\eta_2} = \ddot \eta_2 - \ddot \eta_{2d} = J^{-1} \left( \Gamma - C \dot \eta_2 + d_\Gamma \right) - \ddot \eta_{2d} e¨η2=η¨2−η¨2d=J−1(Γ−Cη˙2+dΓ)−η¨2d
设计滑模面为
s 1 = e ˙ η 2 + λ 1 e η 2 (1) s_1 = \dot e_{\eta_2} + \lambda_1 e_{\eta_2} \tag{1} s1=e˙η2+λ1eη2(1)此时如果把控制量设计为
{ Γ = J ^ Γ ˉ + C η ˙ 2 − d ^ Γ Γ ˉ = η ¨ 2 d − λ 1 e ˙ η 2 − c 1 s 1 (3) \begin{cases} \Gamma = \hat J \bar \Gamma + C \dot \eta_2 - \hat d_\Gamma \\ \bar \Gamma = \ddot \eta_{2d} - \lambda_1 \dot e_{\eta_2} - c_1 s_1 \tag{3} \end{cases} {Γ=J^Γˉ+Cη˙2−d^ΓΓˉ=η¨2d−λ1e˙η2−c1s1(3)亦即
{ Γ = J ^ Γ ˉ + C η ˙ 2 − d ^ Γ λ 1 e ˙ η 2 = η ¨ 2 d − c 1 s 1 − Γ ˉ (4) \begin{cases} \Gamma = \hat J \bar \Gamma + C \dot \eta_2 - \hat d_\Gamma \\ \lambda_1 \dot e_{\eta_2} = \ddot \eta_{2d} - c_1 s_1 - \bar \Gamma \tag{4} \end{cases} {Γ=J^Γˉ+Cη˙2−d^Γλ1e˙η2=η¨2d−c1s1−Γˉ(4)
则对(1)求导,并代入(4)有
s ˙ 1 = e ¨ η 2 + λ 1 e ˙ η 2 = J − 1 ( Γ − C η ˙ 2 + d Γ ) − η ¨ 2 d + λ 1 e ˙ η 2 = J − 1 ( Γ − C η ˙ 2 + d Γ ) − η ¨ 2 d + η ¨ 2 d − c 1 s 1 − Γ ˉ = J − 1 [ ( J ^ Γ ˉ + C η ˙ 2 − d ^ Γ ) − C η ˙ 2 + d Γ ] − c 1 s 1 − Γ ˉ = J − 1 ( J ^ Γ ˉ − d ^ Γ + d Γ ) − c 1 s 1 − Γ ˉ (5) \begin{aligned} \dot s_1 &= \ddot e_{\eta_2} + \lambda_1 \dot e_{\eta_2} \\ &= J^{-1} \left( \Gamma - C \dot \eta_2 + d_\Gamma \right) - \ddot \eta_{2d} + \lambda_1 \dot e_{\eta_2} \\ &= J^{-1} \left( \Gamma - C \dot \eta_2 + d_\Gamma \right) - \ddot \eta_{2d} + \ddot \eta_{2d} - c_1 s_1 - \bar \Gamma \\ &= J^{-1} \left[ \left( \hat J \bar \Gamma + C \dot \eta_2 - \hat d_\Gamma \right) - C \dot \eta_2 + d_\Gamma \right] - c_1 s_1 - \bar \Gamma \\ &= J^{-1} \left( \hat J \bar \Gamma - \hat d_\Gamma + d_\Gamma \right) - c_1 s_1 - \bar \Gamma \tag{5} \end{aligned} s˙1=e¨η2+λ1e˙η2=J−1(Γ−Cη˙2+dΓ)−η¨2d+λ1e˙η2=J−1(Γ−Cη˙2+dΓ)−η¨2d+η¨2d−c1s1−Γˉ=J−1[(J^Γˉ+Cη˙2−d^Γ)−Cη˙2+dΓ]−c1s1−Γˉ=J−1(J^Γˉ−d^Γ+dΓ)−c1s1−Γˉ(5)
下面设计自适应律:
{ d ^ ˙ Γ = γ 1 s 1 J ^ ˙ = − γ 2 Γ ˉ s 1 T (6) \begin{cases} \dot {\hat d}_\Gamma = \gamma_1 s_1 \\ \dot {\hat J} = - \gamma_2 \bar \Gamma s_1^T \tag{6} \end{cases} {d^˙Γ=γ1s1J^˙=−γ2Γˉs1T(6)并设计李雅普诺夫函数为以下形式
V 1 = 1 2 s 1 T s 1 + 1 2 γ 1 d ~ Γ T J − 1 d ~ Γ + 1 2 γ 2 t r ( J ~ T J − 1 J ~ ) (7) V_1 = \frac{1}{2}s_1^Ts_1 + \frac{1}{2\gamma_1} \tilde d_\Gamma^T J^{-1} \tilde d_\Gamma + \frac{1}{2\gamma_2} tr \left( \tilde J^T J^{-1} \tilde J \right) \tag{7} V1=21s1Ts1+2γ11d~ΓTJ−1d~Γ+2γ21tr(J~TJ−1J~)(7)其中
d ~ Γ = d Γ − d ^ Γ , J ~ = J − J ^ (8) \tilde d_\Gamma = d_\Gamma - \hat d_\Gamma, \quad \tilde J = J - \hat J \tag{8} d~Γ=dΓ−d^Γ,J~=J−J^(8)对李雅普诺夫函数求导:
V ˙ 1 = s 1 T s ˙ 1 + 1 γ 1 d ~ Γ T J − 1 d ~ ˙ Γ + 1 γ 2 t r ( J ~ T J − 1 J ~ ˙ ) (9) \dot V_1 = s_1^T \dot s_1 + \frac{1}{\gamma_1} \tilde d_\Gamma ^T J^{-1} \dot {\tilde d}_\Gamma + \frac{1}{\gamma_2} tr \left( \tilde J^T J^{-1} \dot {\tilde J} \right) \tag{9} V˙1=s1Ts˙1+γ11d~ΓTJ−1d~˙Γ+γ21tr(J~TJ−1J~˙)(9)设 d Γ d_\Gamma dΓ和 J J J变化缓慢,那么由(8)
d ~ Γ ˙ = d ˙ Γ − d ^ ˙ Γ = − d ^ ˙ Γ J ~ ˙ = J ˙ − J ^ ˙ = − J ^ ˙ (10) \begin{aligned} \dot {\tilde d_\Gamma} &= \dot d_\Gamma - \dot {\hat d}_\Gamma = - \dot {\hat d}_\Gamma \\ \dot {\tilde J} &= \dot J - \dot {\hat J} = - \dot {\hat J} \tag{10} \end{aligned} d~Γ˙J~˙=d˙Γ−d^˙Γ=−d^˙Γ=J˙−J^˙=−J^˙(10)把(10)代入(9),可得到下式(11)
V ˙ 1 = s 1 T s ˙ 1 + 1 γ 1 d ~ Γ T J − 1 d ~ ˙ Γ + 1 γ 2 t r ( J ~ T J − 1 J ~ ˙ ) = s 1 T s ˙ 1 − 1 γ 1 d ~ Γ T J − 1 d ^ ˙ Γ − 1 γ 2 t r ( J ~ T J − 1 J ^ ˙ ) = s 1 T [ J − 1 ( J ^ Γ ˉ − d ^ Γ + d Γ ) − c 1 s 1 − Γ ˉ ] − 1 γ 1 d ~ Γ T J − 1 d ^ ˙ Γ − 1 γ 2 t r ( J ~ T J − 1 J ^ ˙ ) = − c 1 s 1 T s 1 + s 1 T J − 1 J ^ Γ ˉ + ( − s 1 T J − 1 d ^ Γ + s 1 T J − 1 d Γ ) − s 1 T Γ ˉ − 1 γ 1 d ~ Γ T J − 1 d ^ ˙ Γ − 1 γ 2 t r ( J ~ T J − 1 J ^ ˙ ) = − c 1 s 1 T s 1 + s 1 T J − 1 J ^ Γ ˉ + s 1 T J − 1 d ~ Γ − s 1 T Γ ˉ − 1 γ 1 d ~ Γ T J − 1 d ^ ˙ Γ − 1 γ 2 t r ( J ~ T J − 1 J ^ ˙ ) = − c 1 s 1 T s 1 + s 1 T J − 1 J ^ Γ ˉ + s 1 T J − 1 d ~ Γ − ( s 1 T J − 1 J Γ ˉ ) − 1 γ 1 d ~ Γ T J − 1 d ^ ˙ Γ − 1 γ 2 t r ( J ~ T J − 1 J ^ ˙ ) = − c 1 s 1 T s 1 + s 1 T J − 1 J ^ Γ ˉ − 1 γ 1 d ~ Γ T J − 1 d ^ ˙ Γ − 1 γ 2 t r ( J ~ T J − 1 J ^ ˙ ) − s 1 T J − 1 ( J − J ^ ) Γ ˉ = − c 1 s 1 T s 1 + s 1 T J − 1 J ^ Γ ˉ − 1 γ 1 d ~ Γ T J − 1 d ^ ˙ Γ − 1 γ 2 t r ( J ~ T J − 1 J ^ ˙ ) − s 1 T J − 1 J ~ Γ ˉ \begin{aligned} \dot V_1 &= s_1^T \dot s_1 + \frac{1}{\gamma_1} \tilde d_\Gamma ^T J^{-1} \dot {\tilde d}_\Gamma + \frac{1}{\gamma_2} tr \left( \tilde J^T J^{-1} \dot {\tilde J} \right) \\ &= s_1^T \dot s_1 - \frac{1}{\gamma_1} \tilde d_\Gamma ^T J^{-1} \dot {\hat d}_\Gamma - \frac{1}{\gamma_2} tr \left( \tilde J^T J^{-1} \dot {\hat J} \right) \\ &= s_1^T \left[ J^{-1} \left( \hat J \bar \Gamma - \hat d_\Gamma + d_\Gamma \right) - c_1 s_1 - \bar \Gamma \right] - \frac{1}{\gamma_1} \tilde d_\Gamma^T J^{-1} \dot {\hat d}_\Gamma - \frac{1}{\gamma_2}tr \left( \tilde J^T J^{-1} \dot {\hat J} \right) \\ &= -c_1 s_1^T s_1 + s_1^T J^{-1} \hat J \bar \Gamma + \left( - s_1^T J^{-1} \hat d_\Gamma + s_1^T J^{-1} d_\Gamma \right) - s_1^T \bar \Gamma - \frac{1}{\gamma_1} \tilde d_\Gamma^T J^{-1} \dot {\hat d}_\Gamma - \frac{1}{\gamma_2}tr \left( \tilde J^T J^{-1} \dot {\hat J} \right) \\ &= -c_1 s_1^T s_1 + s_1^T J^{-1} \hat J \bar \Gamma + s_1^T J^{-1} \tilde d_\Gamma - s_1^T \bar \Gamma - \frac{1}{\gamma_1} \tilde d_\Gamma^T J^{-1} \dot {\hat d}_\Gamma - \frac{1}{\gamma_2}tr \left( \tilde J^T J^{-1} \dot {\hat J} \right) \\ &= -c_1 s_1^T s_1 + s_1^T J^{-1} \hat J \bar \Gamma + s_1^T J^{-1} \tilde d_\Gamma - \left( s_1^T J^{-1} J \bar \Gamma \right) - \frac{1}{\gamma_1} \tilde d_\Gamma^T J^{-1} \dot {\hat d}_\Gamma - \frac{1}{\gamma_2}tr \left( \tilde J^T J^{-1} \dot {\hat J} \right) \\ &= -c_1 s_1^T s_1 + s_1^T J^{-1} \hat J \bar \Gamma - \frac{1}{\gamma_1} \tilde d_\Gamma^T J^{-1} \dot {\hat d}_\Gamma - \frac{1}{\gamma_2}tr \left( \tilde J^T J^{-1} \dot {\hat J} \right) - s_1^T J^{-1} \left( J - \hat J \right) \bar \Gamma \\ &= -c_1 s_1^T s_1 + s_1^T J^{-1} \hat J \bar \Gamma - \frac{1}{\gamma_1} \tilde d_\Gamma^T J^{-1} \dot {\hat d}_\Gamma - \frac{1}{\gamma_2}tr \left( \tilde J^T J^{-1} \dot {\hat J} \right) - s_1^T J^{-1} \tilde J \bar \Gamma \end{aligned} V˙1=s1Ts˙1+γ11d~ΓTJ−1d~˙Γ+γ21tr(J~TJ−1J~˙)=s1Ts˙1−γ11d~ΓTJ−1d^˙Γ−γ21tr(J~TJ−1J^˙)=s1T[J−1(J^Γˉ−d^Γ+dΓ)−c1s1−Γˉ]−γ11d~ΓTJ−1d^˙Γ−γ21tr(J~TJ−1J^˙)=−c1s1Ts1+s1TJ−1J^Γˉ+(−s1TJ−1d^Γ+s1TJ−1dΓ)−s1TΓˉ−γ11d~ΓTJ−1d^˙Γ−γ21tr(J~TJ−1J^˙)=−c1s1Ts1+s1TJ−1J^Γˉ+s1TJ−1d~Γ−s1TΓˉ−γ11d~ΓTJ−1d^˙Γ−γ21tr(J~TJ−1J^˙)=−c1s1Ts1+s1TJ−1J^Γˉ+s1TJ−1d~Γ−(s1TJ−1JΓˉ)−γ11d~ΓTJ−1d^˙Γ−γ21tr(J~TJ−1J^˙)=−c1s1Ts1+s1TJ−1J^Γˉ−γ11d~ΓTJ−1d^˙Γ−γ21tr(J~TJ−1J^˙)−s1TJ−1(J−J^)Γˉ=−c1s1Ts1+s1TJ−1J^Γˉ−γ11d~ΓTJ−1d^˙Γ−γ21tr(J~TJ−1J^˙)−s1TJ−1J~Γˉ下面引入3个性质:
对于 d ~ Γ \tilde d_\Gamma d~Γ与 d ~ Γ T \tilde d_\Gamma^T d~ΓT有
d ~ Γ T J − 1 d ^ ˙ Γ = d ^ ˙ Γ T J − 1 d ~ Γ \tilde d_\Gamma^T J^{-1} \dot {\hat d}_\Gamma = \dot {\hat d}_\Gamma^T J^{-1} \tilde d_\Gamma d~ΓTJ−1d^˙Γ=d^˙ΓTJ−1d~Γ且
s 1 T J − 1 J ^ Γ ˉ = t r ( J − 1 J ~ Γ ˉ s 1 T ) s_1^T J^{-1} \hat J \bar \Gamma = tr \left( J^{-1} \tilde J \bar \Gamma s_1^T \right) s1TJ−1J^Γˉ=tr(J−1J~Γˉs1T)且
t r ( J ~ T J − 1 J ^ ˙ ) = t r ( J − 1 J ~ J ^ ˙ ) tr \left( \tilde J^T J^{-1} \dot {\hat J} \right) = tr \left( J^{-1} \tilde J \dot {\hat J} \right) tr(J~TJ−1J^˙)=tr(J−1J~J^˙)则代入(1)有
V ˙ 1 = − c 1 s 1 T s 1 + s 1 T J − 1 J ^ Γ ˉ − 1 γ 1 d ~ Γ T J − 1 d ^ ˙ Γ − 1 γ 2 t r ( J ~ T J − 1 J ^ ˙ ) − s 1 T J − 1 J ~ Γ ˉ = − c 1 s 1 T s 1 + s 1 T J − 1 J ^ Γ ˉ − 1 γ 1 d ^ ˙ Γ T J − 1 d ~ Γ − 1 γ 2 t r ( J − 1 J ~ J ^ ˙ ) − t r ( J − 1 J ~ Γ ˉ s 1 T ) = − c 1 s 1 T + ( s 1 T J − 1 − 1 γ 1 d ^ ˙ Γ T J − 1 ) d ~ Γ − t r ( J − 1 J ~ Γ ˉ s 1 T + 1 γ 2 J − 1 J ~ J ^ ˙ ) = − c 1 s 1 T + ( s 1 T J − 1 − 1 γ 1 d ^ ˙ Γ T J − 1 ) d ~ Γ − t r [ J − 1 J ~ ( Γ ˉ s 1 T + 1 γ 2 J ^ ˙ ) ] = − c 1 s 1 T + ( s 1 T J − 1 − 1 γ 1 d ^ ˙ Γ T J − 1 ) d ~ Γ − ( Γ ˉ s 1 T + 1 γ 2 J ^ ˙ ) J − 1 J ~ \begin{aligned} \dot V_1 &= -c_1 s_1^T s_1 + s_1^T J^{-1} \hat J \bar \Gamma - \frac{1}{\gamma_1} \tilde d_\Gamma^T J^{-1} \dot {\hat d}_\Gamma - \frac{1}{\gamma_2}tr \left( \tilde J^T J^{-1} \dot {\hat J} \right) - s_1^T J^{-1} \tilde J \bar \Gamma \\ &= -c_1 s_1^T s_1 + s_1^T J^{-1} \hat J \bar \Gamma - \frac{1}{\gamma_1} \dot {\hat d}_\Gamma^T J^{-1} \tilde d_\Gamma - \frac{1}{\gamma_2}tr \left( J^{-1} \tilde J \dot {\hat J} \right) -tr \left( J^{-1} \tilde J \bar \Gamma s_1^T \right) \\ &= -c_1 s_1^T + \left( s_1^T J^{-1} - \frac{1}{\gamma_1} \dot {\hat d}_\Gamma^T J^{-1} \right) \tilde d_\Gamma - tr \left( J^{-1} \tilde J \bar \Gamma s_1^T + \frac{1}{\gamma_2} J^{-1} \tilde J \dot {\hat J} \right) \\ &= -c_1 s_1^T + \left( s_1^T J^{-1} - \frac{1}{\gamma_1} \dot {\hat d}_\Gamma^T J^{-1} \right) \tilde d_\Gamma - tr \left[ J^{-1} \tilde J \left( \bar \Gamma s_1^T + \frac{1}{\gamma_2} \dot {\hat J} \right) \right] \\ &= -c_1 s_1^T + \left( s_1^T J^{-1} - \frac{1}{\gamma_1} \dot {\hat d}_\Gamma^T J^{-1} \right) \tilde d_\Gamma - \left( \bar \Gamma s_1^T + \frac{1}{\gamma_2} \dot {\hat J}\right) J^{-1} \tilde J \end{aligned} V˙1=−c1s1Ts1+s1TJ−1J^Γˉ−γ11d~ΓTJ−1d^˙Γ−γ21tr(J~TJ−1J^˙)−s1TJ−1J~Γˉ=−c1s1Ts1+s1TJ−1J^Γˉ−γ11d^˙ΓTJ−1d~Γ−γ21tr(J−1J~J^˙)−tr(J−1J~Γˉs1T)=−c1s1T+(s1TJ−1−γ11d^˙ΓTJ−1)d~Γ−tr(J−1J~Γˉs1T+γ21J−1J~J^˙)=−c1s1T+(s1TJ−1−γ11d^˙ΓTJ−1)d~Γ−tr[J−1J~(Γˉs1T+γ21J^˙)]=−c1s1T+(s1TJ−1−γ11d^˙ΓTJ−1)d~Γ−(Γˉs1T+γ21J^˙)J−1J~再代入自适应律(6)
V ˙ 1 = − c 1 s 1 T + ( s 1 T J − 1 − 1 γ 1 d ^ ˙ Γ T J − 1 ) d ~ Γ − ( Γ ˉ s 1 T + 1 γ 2 J ^ ˙ ) J − 1 J ~ = − c 1 s 1 T + [ s 1 T J − 1 − 1 γ 1 ( γ 1 s 1 T ) J − 1 ] d ~ Γ − [ Γ ˉ s 1 T − 1 γ 2 ( γ 2 Γ ˉ s 1 T ) ] J − 1 J ~ = − c 1 s 1 T s 1 ≤ 0 \begin{aligned} \dot V_1 &= -c_1 s_1^T + \left( s_1^T J^{-1} - \frac{1}{\gamma_1} \dot {\hat d}_\Gamma^T J^{-1} \right) \tilde d_\Gamma - \left( \bar \Gamma s_1^T + \frac{1}{\gamma_2} \dot {\hat J}\right) J^{-1} \tilde J \\ &= -c_1 s_1^T + \left[ s_1^T J^{-1} - \frac{1}{\gamma_1} \left( \gamma_1 s_1^T \right) J^{-1} \right] \tilde d_\Gamma - \left[ \bar \Gamma s_1^T - \frac{1}{\gamma_2} \left( \gamma_2 \bar \Gamma s_1^T \right) \right] J^{-1} \tilde J \\ &= -c_1 s_1^T s_1 \leq 0 \end{aligned} V˙1=−c1s1T+(s1TJ−1−γ11d^˙ΓTJ−1)d~Γ−(Γˉs1T+γ21J^˙)J−1J~=−c1s1T+[s1TJ−1−γ11(γ1s1T)J−1]d~Γ−[Γˉs1T−γ21(γ2Γˉs1T)]J−1J~=−c1s1Ts1≤0即满足李雅普诺夫稳定性。
4. 高度控制器
设计滑模面为
s 2 = e ˙ z + λ 2 e z s_2 = \dot e_z + \lambda_2 e_z s2=e˙z+λ2ez其中 e z = z − z d e_z = z - z_d ez=z−zd。
对其求导
s ˙ 2 = e ¨ z + λ 2 e ˙ z = z ¨ − z ¨ d + λ 2 e ˙ z \dot s_2 = \ddot e_z + \lambda_2 \dot e_z = \ddot z - \ddot z_d + \lambda_2 \dot e_z s˙2=e¨z+λ2e˙z=z¨−z¨d+λ2e˙z
又因为
m 3 z ¨ 1 = U 1 cos φ cos θ − m 0 g + f ( z ) − C 0 z ˙ + ρ m_3 \ddot z _1 = U_1 \cos \varphi \cos \theta - m_0 g + f(z) - C_0 \dot z + \rho m3z¨1=U1cosφcosθ−m0g+f(z)−C0z˙+ρ因此
z ¨ = U 1 m 3 cos φ cos θ − m 0 m 3 g + f ( z ) m 3 − C 0 m 3 z ˙ + ρ m 3 \ddot z = \frac{U_1}{m_3} \cos \varphi \cos \theta - \frac{m_0}{m_3} g + \frac{f(z)}{m_3} - \frac{C_0}{m_3} \dot z + \frac{\rho}{m_3} z¨=m3U1cosφcosθ−m3m0g+m3f(z)−m3C0z˙+m3ρ
因此,
s ˙ 2 = U 1 m 3 cos φ cos θ − m 0 m 3 g + f ( z ) m 3 − C 0 m 3 z ˙ + ρ m 3 − z ¨ d + λ 2 e ˙ z \dot s_2 = \frac{U_1}{m_3} \cos \varphi \cos \theta - \frac{m_0}{m_3} g + \frac{f(z)}{m_3} - \frac{C_0}{m_3} \dot z + \frac{\rho}{m_3} - \ddot z_d + \lambda_2 \dot e_z s˙2=m3U1cosφcosθ−m3m0g+m3f(z)−m3C0z˙+m3ρ−z¨d+λ2e˙z
参考公式(0),可以设计控制量 U 1 U_1 U1为
U 1 = m ^ 3 L + m 0 g − f ( z ) + C 0 z ˙ − ρ ^ cos φ cos θ (12) U_1 = \frac{ \hat m_3 L + m_0 g - f(z) + C_0 \dot z - \hat \rho}{\cos \varphi \cos \theta} \tag{12} U1=cosφcosθm^3L+m0g−f(z)+C0z˙−ρ^(12)并且其中
L = − τ s 2 − k ⋅ s g n ( s 2 ) + z ¨ d − λ 2 e ˙ z (13) L = -\tau s_2 - k \cdot sgn \left( s_2 \right) + \ddot z_d - \lambda_2 \dot e_z \tag{13} L=−τs2−k⋅sgn(s2)+z¨d−λ2e˙z(13) ρ \rho ρ为干扰。
设计自适应律
{ m ^ ˙ 3 = − k 1 L s 2 ρ ^ ˙ = k 2 s 2 (14) \begin{cases} \dot {\hat m}_3 = -k_1 Ls_2 \\ \dot {\hat \rho} = k_2 s_2 \tag{14} \end{cases} {m^˙3=−k1Ls2ρ^˙=k2s2(14)
以及李雅普诺夫函数
V 2 = 1 2 s 2 2 + 1 2 m 3 k 1 m ~ 3 2 + 1 2 m 3 k 2 ρ ~ 2 (15) V_2 = \frac{1}{2} s_2^2 + \frac{1}{2m_3 k_1} \tilde m_3^2 + \frac{1}{2m_3 k_2} \tilde \rho^2 \tag{15} V2=21s22+2m3k11m~32+2m3k21ρ~2(15)求导有
V ˙ 2 = s 2 s ˙ 2 + 1 m 3 k 1 m ~ 3 m ~ ˙ 3 + 1 m 3 k 2 ρ ~ ρ ~ ˙ (16) \dot V_2 = s_2 \dot s_2 + \frac{1}{m_3 k_1} \tilde m_3 \dot {\tilde m}_3+\frac{1}{m_3 k_2} \tilde \rho \dot {\tilde \rho} \tag{16} V˙2=s2s˙2+m3k11m~3m~˙3+m3k21ρ~ρ~˙(16)同样认为 m 3 , ρ m_3, \rho m3,ρ变化缓慢,参考(10)有
m ~ ˙ 3 = − m ^ ˙ 3 , ρ ~ ˙ = − ρ ^ ˙ (17) \dot {\tilde m}_3 = -\dot {\hat m}_3, \quad \dot {\tilde \rho} = - \dot {\hat \rho} \tag{17} m~˙3=−m^˙3,ρ~˙=−ρ^˙(17)那么有式(18)
V ˙ 2 = s 2 s ˙ 2 + 1 m 3 k 1 m ~ 3 m ~ ˙ 3 + 1 m 3 k 2 ρ ~ ρ ~ ˙ = s 2 ( U 1 m 3 cos φ cos θ − m 0 m 3 g + f ( z ) m 3 − C 0 m 3 z ˙ + ρ m 3 − z ¨ d + λ 2 e ˙ z ) − 1 m 3 k 1 m ~ 3 m ^ ˙ 3 − 1 m 3 k 2 ρ ~ ρ ^ ˙ \begin{aligned} \dot V_2 &= s_2 \dot s_2 + \frac{1}{m_3 k_1} \tilde m_3 \dot {\tilde m}_3+\frac{1}{m_3 k_2} \tilde \rho \dot {\tilde \rho} \\ &= s_2 \left( \frac{U_1}{m_3} \cos \varphi \cos \theta - \frac{m_0}{m_3} g + \frac{f(z)}{m_3} - \frac{C_0}{m_3} \dot z + \frac{\rho}{m_3} - \ddot z_d + \lambda_2 \dot e_z \right) - \frac{1}{m_3 k_1} \tilde m_3 \dot {\hat m}_3-\frac{1}{m_3 k_2} \tilde \rho \dot {\hat \rho} \end{aligned} V˙2=s2s˙2+m3k11m~3m~˙3+m3k21ρ~ρ~˙=s2(m3U1cosφcosθ−m3m0g+m3f(z)−m3C0z˙+m3ρ−z¨d+λ2e˙z)−m3k11m~3m^˙3−m3k21ρ~ρ^˙再把式(12) U 1 U_1 U1的表达式代入,并考虑自适应律(14)
V ˙ 2 = s 2 ( m ^ 3 m 3 L + ρ ~ m 3 − z ¨ d + λ 2 e ˙ z ) + 1 m 3 k 1 m ~ 3 k 1 L s 2 − 1 m 3 k 2 ρ ~ k 2 s 2 = ρ ~ m 3 s 2 − z ¨ d s 2 + λ 2 s 2 e ˙ z + m ^ 3 m 3 L s 2 − 1 m 3 ρ ~ s 2 + m ^ 3 m 3 L s 2 \begin{aligned} \dot V_2 &= s_2 \left( \frac{\hat m_3}{m_3} L + \frac{\tilde \rho}{m_3} - \ddot z_d + \lambda_2 \dot e_z \right) + \frac{1}{m_3 k_1} \tilde m_3 k_1 L s_2 - \frac{1}{m_3 k_2} \tilde \rho k_2 s_2 \\ &= \frac{\tilde \rho}{m_3} s_2 - \ddot z_d s_2 + \lambda_2 s_2 \dot e_z + \frac{\hat m_3}{m_3} L s_2 - \frac{1}{m_3} \tilde \rho s_2 + \frac{\hat m_3}{m_3} L s_2 \end{aligned} V˙2=s2(m3m^3L+m3ρ~−z¨d+λ2e˙z)+m3k11m~3k1Ls2−m3k21ρ~k2s2=m3ρ~s2−z¨ds2+λ2s2e˙z+m3m^3Ls2−m31ρ~s2+m3m^3Ls2代入式(13)
V ˙ 2 = − z ¨ d s 2 + λ 2 s 2 e ˙ z + s 2 ( − τ s 2 − k ⋅ s g n ( s 2 ) + z ¨ d − λ 2 e ˙ z ) = − z ¨ d s 2 + λ 2 s 2 e ˙ z − τ s 2 2 − k ∣ s 2 ∣ + s 2 z ¨ d − λ 2 s 2 e ˙ z = − τ s 2 2 − k ∣ s 2 ∣ ≤ 0 \begin{aligned} \dot V_2 &= - \ddot z_d s_2 + \lambda_2 s_2 \dot e_z + s_2 \left( -\tau s_2 - k \cdot sgn \left( s_2 \right) + \ddot z_d - \lambda_2 \dot e_z \right) \\ &= - \ddot z_d s_2 + \lambda_2 s_2 \dot e_z-\tau s_2^2 - k \lvert s_2 \rvert + s_2 \ddot z_d - \lambda_2 s_2 \dot e_z \\ &= -\tau s_2^2 - k \lvert s_2 \rvert \leq 0 \end{aligned} V˙2=−z¨ds2+λ2s2e˙z+s2(−τs2−k⋅sgn(s2)+z¨d−λ2e˙z)=−z¨ds2+λ2s2e˙z−τs22−k∣s2∣+s2z¨d−λ2s2e˙z=−τs22−k∣s2∣≤0亦满足李雅普诺夫稳定性!
5. simulink仿真
搭建simulink框图如下
其中各个模块内部如下:
- s1模块

- s2模块

- J_hat, dgamma_hat模块

- dgamma模块

- m3_hat, rho_hat模块

- Attitude Control模块

- Altitude Control模块

- dot_eta2模块

- MathModel模块

6. 仿真结果
仿真结果如下。
- 姿态通道

- 高度通道

- 控制量

- 估计转动惯量 J i J_i Ji与估计质量 m ^ 3 \hat m_3 m^3

- 高度误差

- 估计扰动 d Γ d_\Gamma dΓ

7. 结论
可以看出:
- 自适应滑模控制可以很好地控制四旋翼飞行稳定性。
- 该方法并不能很好估计扰动 d Γ d_\Gamma dΓ、总质量 m 3 m_3 m3、转动惯量 J i J_i Ji,估计值与真实值有较大差别。但是估计值均为有界值,且能维持飞行稳定。
- 由于控制量 U 1 U_1 U1表达式中的 L L L含有符号项 s g n sgn sgn,因此当调节过程末尾曲线趋于稳定时,真实值会在期望值附近上下摆动,引发 s g n sgn sgn符号在正负之间来回切换,该切换高频且振荡,因此 U 1 U_1 U1为一高频振荡的信号。这也是滑模控制的一个缺点,当实际硬件无法承受这种高频振荡时,往往会无法满足控制需求,进而引发硬件宕机或工作失稳。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 24
24 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)