linux 中进程的 D 状态和 Z 状态
僵尸态是 linux 进程的一种状态,用 Z (zombie) 表示。处于 Z 状态的进程已经不在工作,进程的资源(内存,打开的文件) 都已经释放,只保留 struct task_struct 一个空壳子,用僵尸来表示这个状态非常形象。僵尸进程不能被信号杀死(因为僵尸进程已经死了,当然也不能响应信号),只能被父进程回收。进程处于僵尸态时保存的信息非常少,其中包括进程号,退出码,退出码是比较重要的,
僵尸态是 linux 进程的一种状态,用 Z (zombie) 表示。处于 Z 状态的进程已经不在工作,进程的资源(内存,打开的文件) 都已经释放,只保留 struct task_struct 一个空壳子,用僵尸来表示这个状态非常形象。僵尸进程不能被信号杀死(因为僵尸进程已经死了,当然也不能响应信号),只能被父进程回收。进程处于僵尸态时保存的信息非常少,其中包括进程号,退出码,退出码是比较重要的,父进程回收僵尸进程的时候可以根据退出码确定子进程的退出原因。
D 状态全称是 disk sleep,是不可中断睡眠态,常常用在访问磁盘的场景,当线程被设置为 TASK_UNINTERRUPTIBLE 之后便会显示为 D 状态,处在这种状态下的进程只能被资源唤醒,不能被信号唤醒,kill -9 也杀不掉。
Z 状态和 D 状态没有直接的关系,两者的相同点是不能响应信号;区别是 Z 状态的进程已经死了,D 状态的进程还在工作。
1 Z 状态
1.1 僵尸进程(Z 状态)是如何产生的
当子进程退出之后,如果父进程没有通过 wait() 进行回收,那么这个进程就会变成僵尸进程。父进程通过 wait() 可以获取子进程退出的状态,比如是被某个信号(SIGTERM, SIGABRT 等)杀死的或者退出码(0, -1 等)是什么。
如下代码,创建了一个子进程,子进程打印一条日志之后就退出了,父进程睡眠了 20s,在子进程退出,父进程睡眠的这 20s 内,子进程的状态是 Z 状态。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
int main(void) {
pid_t pid = fork();
if (pid < 0) {
perror("fork failed.");
exit(1);
}
if (pid > 0) {
printf("this is the parent process, pid is %d.\n", getpid());
sleep(20);
} else if (pid == 0) {
printf("this is the child process. pid is: %d. ppid is: %d.\n", getpid(), getppid());
return 0;
}
return 0;
}将上边的代码编译,运行,可以看到父进程的进程号是 3247, 子进程的进程号是 3248。子进程退出之后处于 Z 状态,处于 Z 状态的进程,进程名用中括号括起来(僵尸放到了棺材里),并且后边标记为 defunct。
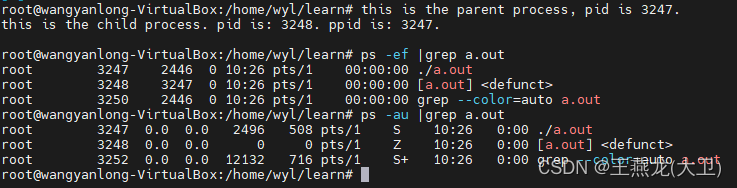
僵尸进程是不再工作的进程,是已经死掉的进程,不能通过 kill -9 杀掉。
要想让僵尸进程消失,可以杀掉它的父进程。父进程被杀掉之后,僵尸进程会变成孤儿进程,孤儿进程会被系统的 1 号进程收留(托孤),1 号进程会检查该进程是不是僵尸进程,如果是的话则会将进程回收。
孤儿进程会托孤给 1 号进程,下边的代码显示了这个过程,父进程 sleep 5s 之后退出,子进程 sleep 8s,也就是说在子进程退出之前父进程已经退出了,这样父进程不会回收子进程。子进程在 sleep 前后分别打印 ppid(parent pid 父进程的 pid), 可以看到 sleep 之后打印的父进程 id 是 1。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
int main(void) {
pid_t pid = fork();
if (pid < 0) {
perror("fork failed.");
exit(1);
}
if (pid > 0) {
printf("\nthis is the parent process, pid: %d\n", getpid());
sleep(5);
printf("\nparent process after sleep\n");
} else if (pid == 0) {
printf("\nthis is the child process. pid: %d, ppid: %d\n", getpid(), getppid());
sleep(8);
printf("\nchild process after sleep, pid: %d, ppid: %d\n", getpid(), getppid());
sleep(100);
return 0;
}
return 0;
}
1.2 假僵尸进程
一开始的时候说过,僵尸进程是不在工作的进程,资源都已经释放,并且通过 kill -9 杀不掉。本节记录的假的僵尸进程,通过 ps -aux 看到进程的状态是 Z,但是这个进程还在工作,资源没有释放,并且可以通过 kill -9 杀掉。
正常情况下主进程的退出是通过主线程中 return 或者调用 exit() 退出的,这种退出方式,整个进程都会退出。如果主线程通过 pthread_exit() 进行退出,那么退出的只是这个主线程,如果进程中有子线程的话,子线程不会退出,并且资源也不会释放。
下边这段代码,在主线程中创建了一个子线程,子线程中是 while(1) 循环。创建完子线程之后,主线程调用 pthread_exit() 退出,构造了一个主线程退出,但是子线程没有退出的场景。
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <sys/wait.h>
#include <unistd.h>
void *thread_func(void *data) {
printf("thread entry\n");
while (1)
;
}
int main(void) {
printf("pid: %d\n");
pthread_t tid;
pthread_create(&tid, NULL, thread_func, NULL);
pthread_exit(NULL);
return 0;
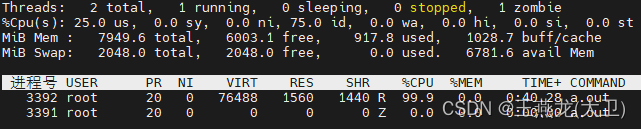
}上述代码运行之后,通过 top 查看进程的情况,发现进程中有两个线程,分别是 3391 和 3392,其中 3391 是主线程,处于 Z 状态,3392 是子线程,处在运行态。主线程处于 Z 状态,所以查看进程的状态也是处于 Z 状态。这种状态是假的僵尸态,父进程也不会回收假的僵尸进程。
1.3 父进程是 1 号进程的僵尸进程是怎么产生的
从上边的分析来看,如果进程先变成了僵尸进程,然后托孤给 1 号进程,那么托孤给 1 号进程之后,1 号进程就会回收这个僵尸进程;如果进程先变成孤儿进程,那么变为孤儿进程时,便会托孤给 1 号进程,之后进程状态转换为僵尸进程时,也会被 1 号进程回收。上边这两种情况下,如果僵尸进程的父进程是 1 号进程,那么僵尸进程很快就会被 1 号进程回收,僵尸进程存在的时间比较短。
另外还有一种情况,僵尸进程的父进程是 1 号进程的状态存在的时间比较长,僵尸进程并没有被回收。以下 3 中条件会出现这种情况:
(1)僵尸进程是假僵尸进程
(2)进程被使用,比如被 gdb 调试
(3)进程中有子线程处于 D 状态
下边分别用例子来构造出上边 3 种情况:
(1)僵尸进程是假僵尸进程
如下代码,fork 出一个子进程,之后父进程退出,父进程退出之后,子进程被过继给进程 1。子进程中创建了一个子线程之后,主线程通过 pthread_exit() 退出,所以子进程就成了假僵尸进程,假僵尸进程可以直接 kill 掉。这个时候假的僵尸进程的父进程是 1 号进程,并且这个进程还没有真正退出。
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <sys/wait.h>
#include <unistd.h>
void *thread_func(void *data) {
printf("thread entry\n");
while (1)
;
}
int main(void) {
printf("pid: %d\n");
if (fork() == 0) {
pthread_t tid;
pthread_create(&tid, NULL, thread_func, NULL);
pthread_exit(NULL);
}
return 0;
}
(2)进程被使用,比如被 gdb 调试
如下的代码,fork() 一个子进程之后,父子进程都执行 while(1) 循环,如果使用 gdb --pid 子进程 id 之后,然后再 kill 掉父进程和子进程之后,父进程会直接退出,子进程会成为父进程是 1 号进程的僵尸进程,这种进程待 gdb 退出之后才会被回收,还在被 gdb 跟踪的过程中,1 号进程不会回收这个僵尸进程。
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <sys/wait.h>
#include <unistd.h>
int main(void) {
int i = 0;
fork();
while (1) {
printf("i: %d\n", i++);
sleep(1);
}
return 0;
}
(3)进程中有子线程处于 D 状态
如果主线程已经退出,但是子线程中有 D 状态,这个时候跟假的僵尸进程是比较类似的。
2 D 状态
2.1 D 状态 TASK_UNINTERRUPTIBLE
为了模拟出 TASK_UNINTERRUPTIBLE 的状态,我们通过内核模块来实现。
下边这个内核模块中有一个 cb 参数,该参数可以通过命令行 echo xxx > xxx 进行修改,在修改这个参数的时候,notify_param 便会被调用,在该函数中将线程设置为 TASK_UNINTERRUPTIBLE 然后调用 schedule() 让出 cpu,这种情况下,echo 命令便会卡住。在设置状态之前打印了当前线程的 id,这样可以定位到是哪个线程。
之所以通过 cb 参数的方式来模拟出 D 状态,而不直接创建内核线程,再设置内核线程为 D 状态,是因为前者的参数设置函数可以在用户态调用到,也就是最终设置为 D 状态的线程是一个用户态的线程,而如果在内核线程里边设置 D 状态,那么这个线程只是个内核态的线程。而 kill 信号只能发送给用户态的进程,对内核态线程无效, 后边要说明处于 TASK_UNINTERRUPTIBLE 状态的进程,使用 kill 命令杀不掉,所以使用了 cb 参数的方式来模拟出 D 状态。
内核模块源码:
#include <linux/init.h>
#include <linux/kernel.h>
#include <linux/kthread.h>
#include <linux/module.h>
#include <linux/moduleparam.h>
int cb_value = 0;
int notify_param(const char *val, const struct kernel_param *kp)
{
int res = param_set_int(val, kp);
printk("pid %d\n", current->pid);
set_current_state(TASK_UNINTERRUPTIBLE);
schedule();
if (res == 0)
{
printk(KERN_INFO "call back function called, new value: %d\n", cb_value);
return 0;
}
return -1;
}
const struct kernel_param_ops test_param_ops =
{
.set = ¬ify_param,
.get = ¶m_get_int,
};
module_param_cb(cb_value, &test_param_ops, &cb_value, S_IRUGO | S_IWUSR);
static int __init test_init(void)
{
printk(KERN_INFO "cb_value = %d \n", cb_value);
printk(KERN_INFO "test module is installed\n");
return 0;
}
static void __exit test_exit(void)
{
printk(KERN_INFO "test module is removed\n");
}
module_init(test_init);
module_exit(test_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("w2x");
MODULE_DESCRIPTION("test disk sleep by module_param_cb");
MODULE_VERSION("1.0");
内核模块编译脚本:
obj-m += test.o
KDIR =/lib/modules/$(shell uname -r)/build
all:
make -C $(KDIR) M=$(shell pwd) modules
clean:
make -C $(KDIR) M=$(shell pwd) clean操作步骤:
(1)编译之后安装模块,通过如下命令设置 cb_value 的值,那么进程就会进入 D 状态。
echo 10 > /sys/module/test/parameters/cb_value
(2)通过 dmesg 查看到线程号是 2402

(3)通过 ps -aux |grep 2402 查看到该线程处于 D 状态
这样我们就构造除了一个处于 D 状态的用户态进程。
![]()
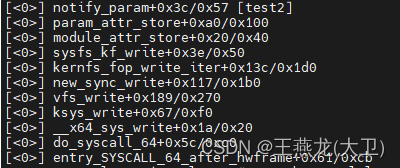
(4)通过 cat /proc/2402/stack 看到线程的调用栈,该线程调用到了 notify_param
(5)2402 通过 kill -9 杀不掉
设置 TASK_UNINTERRUPTIBEL 之后,线程处于 D 状态,D 状态又叫 disk sleep,与访问磁盘有关,该状态通过 kill 信号杀不掉,只能等到条件满足之后才可从 D 状态中返回。
D 状态也不仅仅用在磁盘操作的场景,当内核出现异常的时候,有时也会将线程设置为 D 状态,如下代码所示,当进程在退出的时候,内核出现了 bug,会递归调用退出函数,这个时候内核就会停止该进程的退出过程而把它设置为 D 状态。本文后边讲的问题就是这个现象。
void __noreturn do_exit(long code)
{
/*
* We're taking recursive faults here in do_exit. Safest is to just
* leave this task alone and wait for reboot.
*/
if (unlikely(tsk->flags & PF_EXITING)) {
pr_alert("Fixing recursive fault but reboot is needed!\n");
futex_exit_recursive(tsk);
set_current_state(TASK_UNINTERRUPTIBLE);
schedule();
}
}另外,内核中的互斥体 mutex,如果不能立即锁,在等待锁的过程中,也会进入 D 状态。
如下内核模块,创建了一个内核线程,在内核线程中连续调用两次 mutex_lock(),第二次调用会造成死锁,该线程就会设置成 TASK_UNINTERRUPTIBLE 状态。
#include <linux/init.h>
#include <linux/module.h>
#include <linux/mutex.h>
#include <linux/kthread.h>
#include <linux/delay.h>
struct mutex test_mutex;
static int thread_func(void *data) {
printk("test_thread_pid: %d\n", current->pid);
mutex_init(&test_mutex);
printk("1\n");
mutex_lock(&test_mutex);
printk("2\n");
mutex_lock(&test_mutex);
printk("3\n");
return 0;
}
static int __init hello_init(void){
printk("Hello World enteri, tid: %d\n", current->pid);
kthread_run(thread_func, NULL, "test_thread");
return 0;
}
static void __exit hello_exit(void){
printk("Hello World exit\n");
}
module_init(hello_init);
module_exit(hello_exit);
MODULE_AUTHOR("wx2");
MODULE_LICENSE("GPL v2");
MODULE_DESCRIPTION("hello world kernel module");
MODULE_ALIAS("hello world kernel module");
如下是 mutex_lock 相关的代码,最终会调用 __mutex_lock,该函数的第二个入参是 TASK_UNINTERRUPTIBLE,在 __mutex_lock 中最终会将线程设置成不可中断睡眠状态。
static noinline void __sched
__mutex_lock_slowpath(struct mutex *lock)
{
__mutex_lock(lock, TASK_UNINTERRUPTIBLE, 0, NULL, _RET_IP_);
}2.2 D 状态 TASK_KILLABLE
set_current_state(TASK_UNINTERRUPTIBLE);
将上一节(1.4 节) 中的 set_current_state(TASK_UNINTERRUPTIBLE) 中 TASK_UNINTERRUPTIBLE 改成 TASK_KILLABLE,进程仍然显示为 D 状态。
两者的区别是,TASK_KILLABLE 可以使用 kill -9 杀掉,处于TASK_UNINTERRUPTIBLE 状态的线程不能被杀掉。
2.3 hung task 检测
内核 hung task 检测功能可以检测出处于 TASK_UNINTERRUPTIBLE 的进程,有以下参数可以设置。
|
参数 |
含义 |
|
kernel.hung_task_timeout_secs = 120 |
线程处在 TASK_UNINTERRUPTIBLE 的超时时间,超时之后打印线程栈或者内核 panic |
|
kernel.hung_task_panic = 0 |
如果设置为 1,那么超时之后内核 panic, 否则超时之后只打印线程栈,可以在 dmesg 中看到 |
|
kernel.hung_task_check_interval_secs = 0 |
检测周期 |
|
kernel.hung_task_warnings = 10 |
打印告警日志的次数 |
|
kernel.hung_task_check_count = 4194304 |
hung task 功能一次检测的线程的个数 |
|
kernel.hung_task_all_cpu_backtrace = 0 |
打印每个核的调用栈 |
告警信息:
[ 242.809728] INFO: task bash:2413 blocked for more than 120 seconds.
[ 242.809755] Tainted: G OE 5.15.0-67-generic #74~20.04.1-Ubuntu
[ 242.809757] "echo 0 > /proc/sys/kernel/hung_task_timeout_secs" disables this message.
[ 242.809758] task:bash state:D stack: 0 pid: 2413 ppid: 2245 flags:0x00000000
[ 242.809761] Call Trace:
[ 242.809763]
[ 242.809766] __schedule+0x2cd/0x890
[ 242.809777] schedule+0x69/0x110
[ 242.809782] notify_param+0x3c/0x57 [test]
[ 242.809784] param_attr_store+0xa0/0x100
[ 242.809815] module_attr_store+0x20/0x40
[ 242.809821] sysfs_kf_write+0x3e/0x50
[ 242.809824] kernfs_fop_write_iter+0x13c/0x1d0
[ 242.809826] new_sync_write+0x117/0x1b0
[ 242.809829] vfs_write+0x189/0x270
[ 242.809830] ksys_write+0x67/0xf0
[ 242.809832] __x64_sys_write+0x1a/0x20
[ 242.809834] do_syscall_64+0x5c/0xc0
[ 242.809836] ? handle_mm_fault+0xd8/0x2c0
[ 242.809839] ? exit_to_user_mode_prepare+0x3d/0x1c0
[ 242.809844] ? do_user_addr_fault+0x1e0/0x660
[ 242.809847] ? irqentry_exit_to_user_mode+0x9/0x20
[ 242.809848] ? irqentry_exit+0x1d/0x30
[ 242.809849] ? exc_page_fault+0x89/0x170
[ 242.809852] entry_SYSCALL_64_after_hwframe+0x61/0xcb
[ 242.809854] RIP: 0033:0x7fe349068077
[ 242.809856] RSP: 002b:00007ffef8d504b8 EFLAGS: 00000246 ORIG_RAX: 0000000000000001
[ 242.809858] RAX: ffffffffffffffda RBX: 0000000000000002 RCX: 00007fe349068077
[ 242.809860] RDX: 0000000000000002 RSI: 000055568ea38090 RDI: 0000000000000001
[ 242.809860] RBP: 000055568ea38090 R08: 000000000000000a R09: 0000000000000001
[ 242.809861] R10: 000055568c9d5017 R11: 0000000000000246 R12: 0000000000000002
[ 242.809862] R13: 00007fe3491476a0 R14: 00007fe3491434a0 R15: 00007fe3491428a0
hung task 检测的入口函数是 hung_task.c 中的 watchdog():
./linux-5.15.50/linux-5.15.50/kernel/hung_task.c
/*
* kthread which checks for tasks stuck in D state
*/
static int watchdog(void *dummy)
{
unsigned long hung_last_checked = jiffies;
set_user_nice(current, 0);
for ( ; ; ) {
unsigned long timeout = sysctl_hung_task_timeout_secs;
unsigned long interval = sysctl_hung_task_check_interval_secs;
long t;
if (interval == 0)
interval = timeout;
interval = min_t(unsigned long, interval, timeout);
t = hung_timeout_jiffies(hung_last_checked, interval);
if (t <= 0) {
if (!atomic_xchg(&reset_hung_task, 0) &&
!hung_detector_suspended)
check_hung_uninterruptible_tasks(timeout);
hung_last_checked = jiffies;
continue;
}
schedule_timeout_interruptible(t);
}
return 0;
}2.4linux 中平均负载统计时包括了 D 状态的线程
linux 中平均负载的统计中包括了 TASK_RUNNING 的线程以及 TASK_UNINTERRUPTIBLE 的线程。
2.4.1 D 状态和平均负载
linux 中进程的 D 状态全称是 Disk Sleep,在内核中用 TASK_UNINTERRUPTIBLE 来表示。任务阻塞态有两个,一个是 TASK_INTERRUPTIBLE,一个是 TASK_UNINTERRUPYIBLE。所谓阻塞态,一般是 io(网络 io 或者磁盘 io),比如网络收包的时候,如果当前没有数据,那么就会一直阻塞等待数据到来。TASK_INTERRUPTIBLE 是浅度睡眠,这种状态可以被信号唤醒,也可以被资源唤醒;TASK_UNINTERRUPTIBLE 是深度睡眠,处于深度睡眠时,任务只能被资源唤醒,不能被信号唤醒。当然,如果一个任务处于 D 状态,使用 kill 信号也是不能将之杀死的,因为 D 状态的进程不响应信号。
平均负载(load average),表示单位时间内,linux 运行队列中的任务个数。平均负载可以用 3 个命令来查看:top, uptime, w。这 3 个命令显示平均负载的 3 个值,从前向后分别是过去 1分钟,5分钟,15 分钟的平均负载。
top
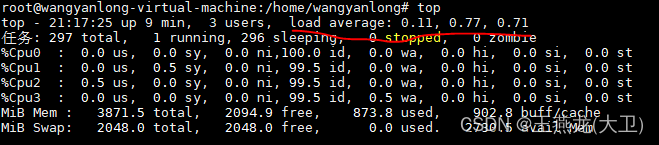
uptime
![]()
w

平均负载中的平均,并不是可运行任务数在 cpu 核上的平均,比如一台机器有 8 个 cpu 核,运行队列中等待的任务数是 16,那么平均负载就是 16/8 = 2,平均负载不是这样计算的。
平均负载是在时间维度上的平均,具体实现比较复杂,有兴趣可以参考 kernel/sched/loadavg.c。如果一台机器上有 8 个 cpu 核,平均负载是 4,那么说明 cpu 有 50% 的空闲;如果平均负载是 8,那么每个任务都有机会执行;如果平均负载是 12,那么说明机器的负载偏高了,一些应用可能会卡顿。
平均负载不仅仅统计了可以运行的任务,还统计了处于 D 状态的任务,下一节我们用一个内核模块来构造出 D 状态的任务,然后观察负载升高,以此来证明,D 状态的任务会增加系统负载。
2.4.2 负载升高示例
2.4.2.1 TASK_RUNNING
TASK_RUNNING 表示进程是可以运行的,可能正在运行也可能在运行队列中等待。
如下代码是一个 while(1) ,cpu 占用率接近 100%。会让平均负载升高 1。
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
int main() {
while (1) {
}
return 0;
}
2.4.2.2 TASK_UNINTERRUPTIBLE
使用一个内核模块来构造出 D 状态的线程,然后观察系统负载升高的过程。
对于此内核模块的介绍如下:
① 模块初始化函数,模块退出函数
一个内核模块需要使用 module_init() 和 module_exit() 声明这个模块的初始化函数和退出函数。这两个函数主要工作分别是资源的申请和资源的释放。使用这样的规范来约束开发者,可以尽量避免资源忘记释放的情况发生。像 c++ 中的类也有构造函数和析构函数,与这里的初始化函数和退出函数的作用是类似的。
module_init(disk_sleep_module_init);
module_exit(disk_sleep_module_exit);
② 这个内核模块注册了一个字符设备
模块加载之后,会在 /dev/ 下生成一个字符设备:disk_sleep_device。

字符设备的关键是声明了一个 struct file_operations 结构体,其中可以定义对该设备的读写函数,这也体现了 linux “一切皆文件” 的思想。
创建一个字符设备,需要依次调用 3 个函数来实现:register_chrdev(),class_create(), device_create()。注销一个字符设备也有对应的 3 个函数:device_destroy(),class_destroy(),unregister_chrdev()。
③ 通过在字符设备的读函数中设置 TASK_UNINTERRUPTIBLE 来构造 D 状态
模块加载之后通过 cat /dev/disk_sleep_device 可以触发调用模块的读函数 device_read(),在该函数中设置了 D 状态。
#include <asm/uaccess.h>
#include <linux/device.h>
#include <linux/fs.h>
#include <linux/init.h>
#include <linux/module.h>
#define MODULE_NAME "disk_sleep_module"
#define DEVICE_NAME "disk_sleep_device"
static int major_number;
static char message[256] = {0};
static struct class *dev_class;
static struct device *device;
static int device_open(struct inode *, struct file *);
static int device_release(struct inode *, struct file *);
static ssize_t device_read(struct file *, char *, size_t, loff_t *);
static ssize_t device_write(struct file *, const char *, size_t, loff_t *);
static struct file_operations fops = {
.owner = THIS_MODULE,
.open = device_open,
.read = device_read,
.write = device_write,
.release = device_release,
};
// 模块初始化函数
static int __init disk_sleep_module_init(void) {
printk(KERN_INFO "disk_sleep_module: Initializing...\n");
// 注册字符串设备
// 第 3 个参数是一个 struct file_operations 类型
// 字符设备也可以当做一个文件来操作
major_number = register_chrdev(0, DEVICE_NAME, &fops);
if (major_number < 0) {
printk("disk_sleep_module, failed to register char devm major number: %d\n", major_number);
return major_number;
}
printk("disk_sleep_module: registered correctly with major number %d\n", major_number);
// 创建设备 class
dev_class = class_create(THIS_MODULE, DEVICE_NAME);
if (IS_ERR(dev_class)) {
printk("create dev class error.\n");
return -1;
}
// 创建设备
device = device_create(dev_class, NULL, MKDEV(major_number, 0), NULL, DEVICE_NAME);
if (IS_ERR(device)) {
printk("create device error.\n");
return -1;
}
return 0;
}
// 模块退出函数
static void __exit disk_sleep_module_exit(void) {
// 释放设备资源
device_destroy(dev_class, MKDEV(major_number, 0));
class_destroy(dev_class);
// 注销设备
unregister_chrdev(major_number, DEVICE_NAME);
printk("disk_sleep_module: Goodbye from the LKM!\n");
}
static int device_open(struct inode *inode, struct file *file) {
printk("disk_sleep_module: Device has been opened\n");
return 0;
}
static int device_release(struct inode *inode, struct file *file) {
printk("disk_sleep_module: Device successfully closed\n");
return 0;
}
static ssize_t device_read(struct file *file, char *buffer, size_t length, loff_t *offset) {
int bytes_read = 0;
printk("disk_sleep_module: before set uninterruptible\n");
__set_current_state(TASK_UNINTERRUPTIBLE); // 改变进程状态为睡眠
printk("disk_sleep_module: before schedule\n");
schedule();
while (length && (message[*offset] != 0)) {
put_user(message[*offset], buffer++);
length--;
bytes_read++;
(*offset)++;
}
return bytes_read;
}
static ssize_t device_write(struct file *file, const char *buffer, size_t length, loff_t *offset) {
int i;
printk("device write: %s\n", buffer);
for (i = 0; i < length && i < sizeof(message); i++) {
get_user(message[i], buffer + i);
}
return i;
}
module_init(disk_sleep_module_init);
module_exit(disk_sleep_module_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("wyl");
MODULE_DESCRIPTION("a module to make D state");
MODULE_VERSION("0.1");Makefile
obj-m += disk_sleep.o
CONFIG_MODULE_SIG=n
all:
make -C /lib/modules/$(shell uname -r)/build M=$(PWD) modules
clean:
make -C /lib/modules/$(shell uname -r)/build M=$(PWD) clean执行 cat /dev/disk_sleep_device 之前,观察机器的平均负载在 0.20 左右。
执行 cat /dev/disk_sleep_device,如下图所示,执行了 3 次,构造了 3 个 D 状态的线程。

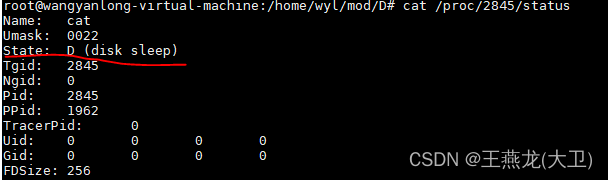
以线程 2845 为例,该线程的状态是 D 状态,disk sleep。
通过 top 查看,系统的负载在逐渐增大,最终会增长到 3 左右。

TASK_KILLABLE 状态的线程,同样也会显示为 D 状态,也会导致系统负载升高。
2.4.3 对 top 中 %wa 的理解
2.4.3.1 wa
使用 top 查看 cpu 使用率的时候,如果输入一个 1,那么就会显示每个 cpu 的使用情况。其中每个 cpu 使用率都详细统计到几项:us, sy, ni, id, wa, hi, si, st,其中 ni 和 st 使用比较少,这里不做记录。
|
us |
用户态 cpu 使用率 |
|
sy |
内核态线程 cpu 使用率 |
|
id |
cpu 空闲 |
|
wa |
wait,比如读写磁盘时的 wait |
|
hi |
硬中断 |
|
si |
软中断 |

其中 wa 也称 io wait,当这个比例比较高时,说明达到了磁盘瓶颈。
使用命令 dd if=/dev/zero of=testfile bs=10M count=1000000 & 来模拟向磁盘写数据,我测试的时候起了 3 个。
从下图中可以看出来,dd 大部分时间处于 D 状态,也就是在访问磁盘的时候。cpu 占用率中的 wa 占比也比较高。load average 也在升高。
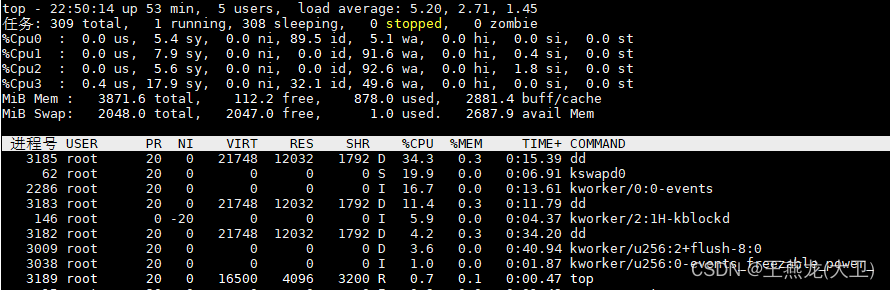
wa 并不是真正的占用 cpu,而表示在访问磁盘的时候,等待磁盘响应的时间。这段时间并不是真正的占用 cpu,cpu 是空闲的状态。也就是说如果有其它应用要占用很多 cpu,统计在 wa 里的 cpu 使用率会分配到这些应用上。
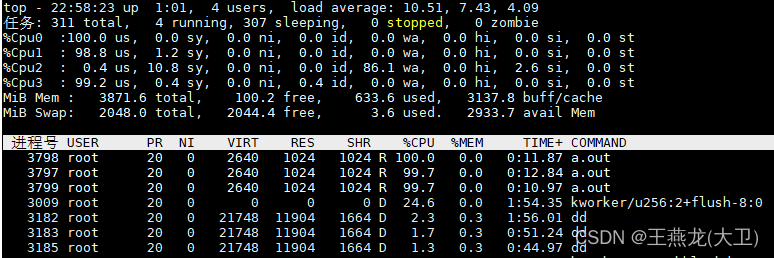
如下图所示,a.out 中就是一个 while(1),cpu 占用率将近 100%,起了 3 个这样的应用。a.out 启动之后,cpu 大部分统计到 us 中了,wa 的统计减少。
2.4.3.2 cpu 统计中的 wa 和内存统计中的 buff/cache 的相似之处
wa 接近于 id,其实 cpu 也是空闲的。这就类似于 free 命中显示的内存的使用情况,free 中的 buff/cache 表示文件读写时的 cache 所使用的内存,但是后边还有一个 available,available 大概意思就是 buff/cache 中可以回收的内存。buff/cache 的内存虽然在使用,但是大部分都是可以随时回收的,如果有应用需要大量的内存,那么可以将 buff/cache 中的内存回收进行使用。

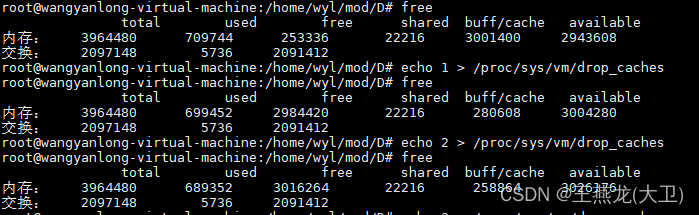
linux 中有一个文件 /proc/sys/vm/drop_caches,向这个文件中写 1 会释放页缓存,写 2 会释放 dentry 和 inode 缓存,写 3 会释放页缓存以及 dentry 和 inode 缓存。如下图所示是操作过程,在操作前和操作后都用 free 查看内存使用情况,可以看到回收缓存之后,buff/cache 减小了,free 和 avalible 增大了。
free 命令显示了两行数据,第一行是物理内存的使用情况,第二行是交换分区的使用情况。交换分区一般是当系统内存比较紧张时,使用磁盘来当内存来使用。
free 命令显示的数字,默认情况下单位是 KB。
内存:
|
total |
used |
free |
shared |
buff/cache |
available |
|
物理内存总量 |
使用的内存 |
空闲内存 |
共享内存 |
页缓存,dentry, inode 缓存 |
可以使用的内存 |
total = used + free + buff/cache
其中 free 表示空闲的内存,available 表示可以使用的内存,available 是考虑了 free 以及 buff/cache 中可以回收的内存之后统计出来的结果。
shared 是被多个进程共享的内存,是正在被使用,不能回收的内存。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 24
24 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)