基于机器人的齐次变换矩阵及其运算
一齐次变换矩阵及其运算由于各种原因,变换矩阵应该写成方型形式,33或者44即可。为保证所表示的矩阵为方阵,如果在同一矩阵中既表示姿态又表示位置,那么在矩阵中加入比例因子使之成为4*4的矩阵即可。变换可以定义为空间的一个运动。已知一直角坐标系中某点坐标,那么该点在另一直角坐标系中的坐标可通过齐次坐标变换来求得。变换可分为如下形式:纯平移纯旋转平移和旋转的结合1.平移的齐次变换空间的某一点在直角坐标系
·
一 齐次变换矩阵及其运算
由于各种原因,变换矩阵应该写成方型形式,33或者44即可。
为保证所表示的矩阵为方阵,如果在同一矩阵中既表示姿态又表示位置,那么在矩阵中加入比例因子使之成为4*4的矩阵即可。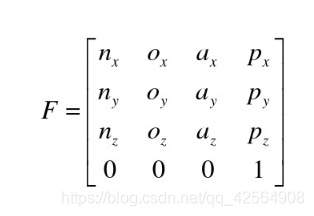
变换可以定义为空间的一个运动。
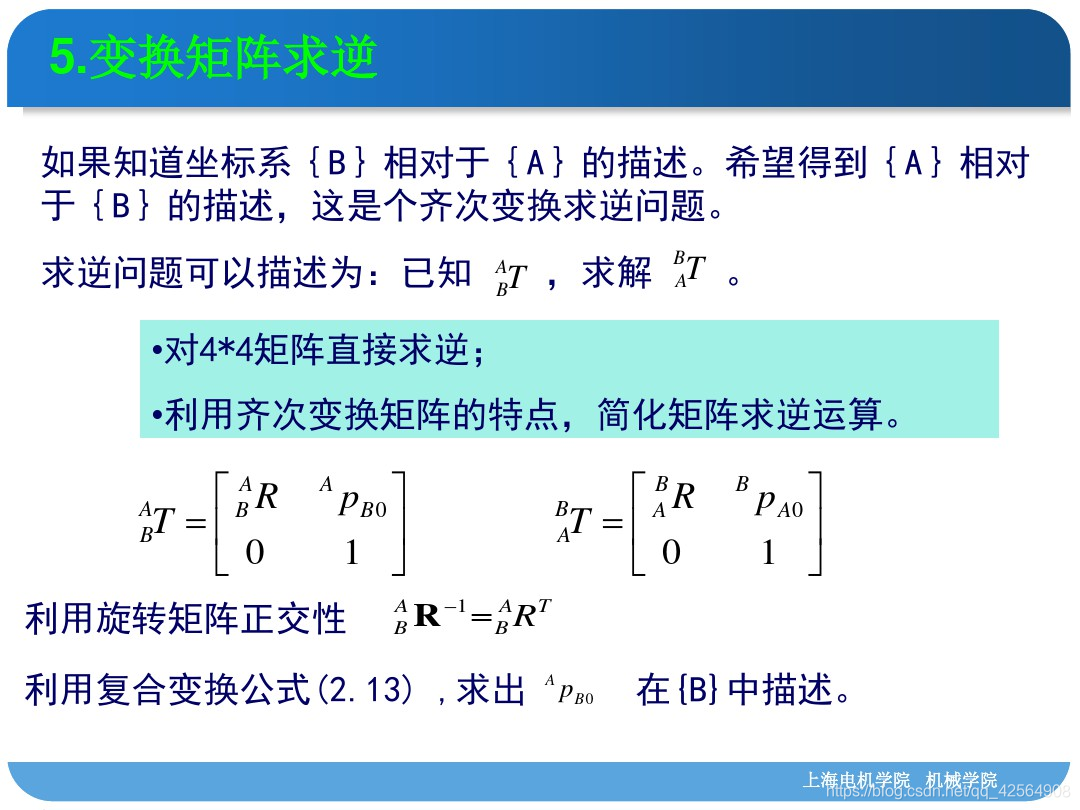
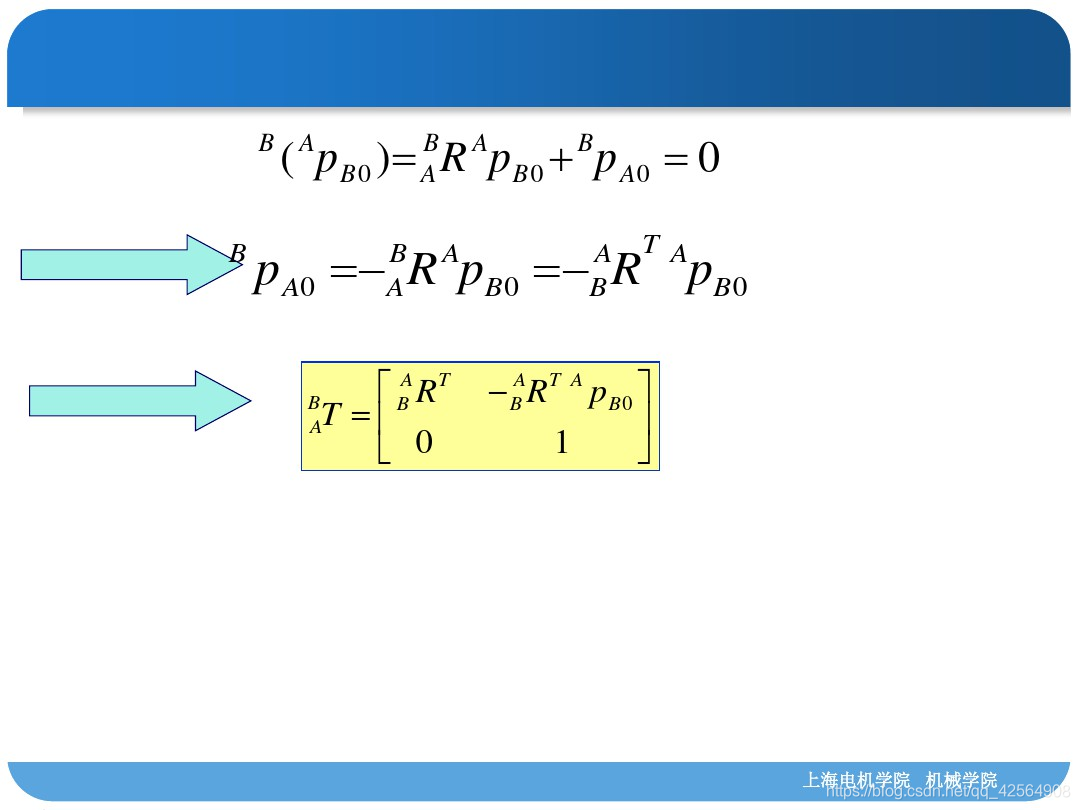
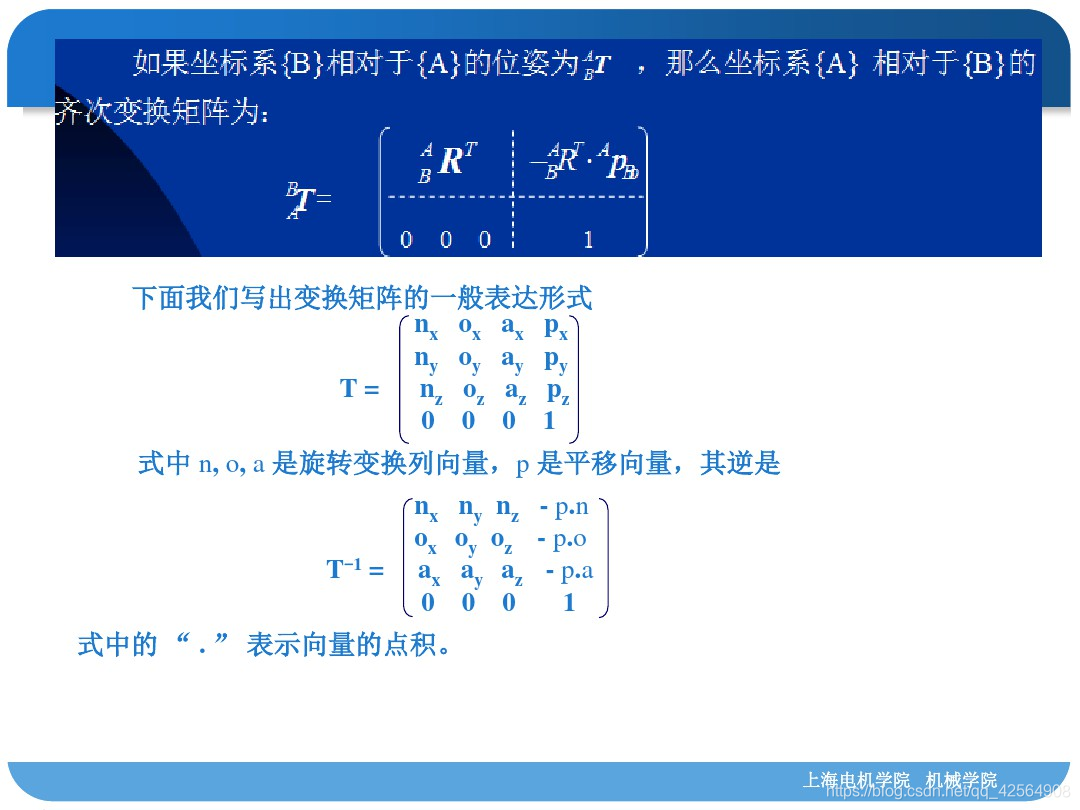
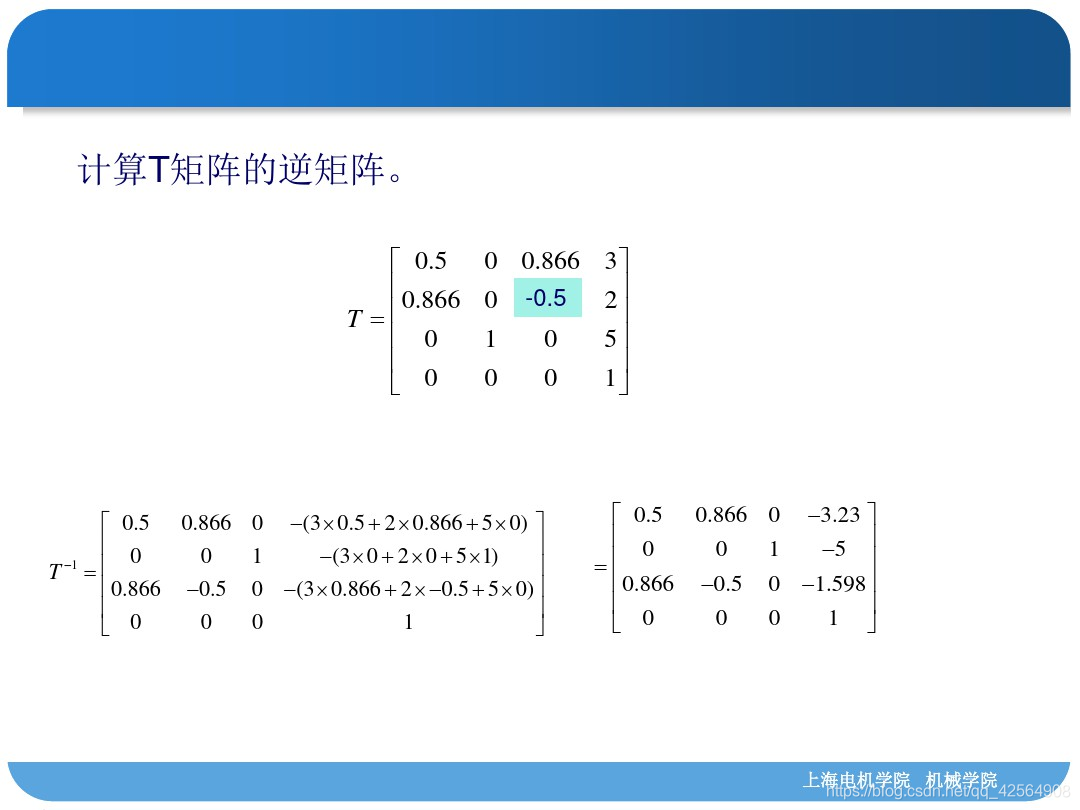
已知一直角坐标系中某点坐标,那么该点在另一直角坐标系中的坐标可通过齐次坐标变换来求得。
变换可分为如下形式:
纯平移
纯旋转
平移和旋转的结合
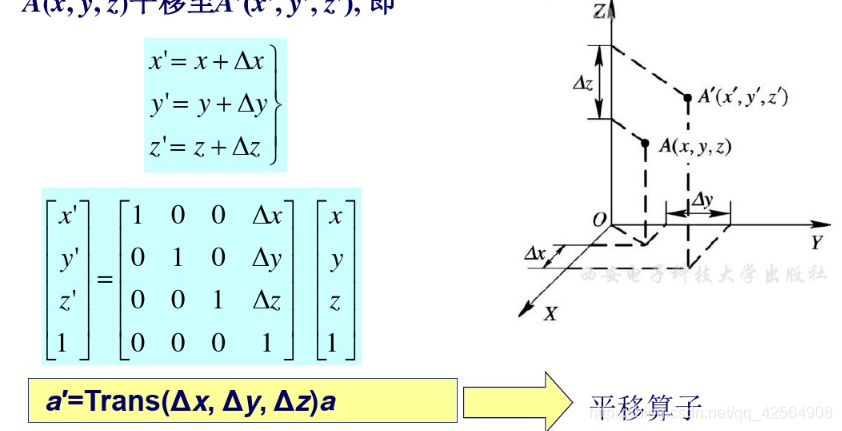
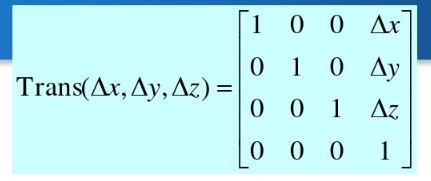
1.平移的齐次变换
空间的某一点在直角坐标系中的平移,由A(X,Y,Z)平移至A’(X’,Y’,Z’),即
其中
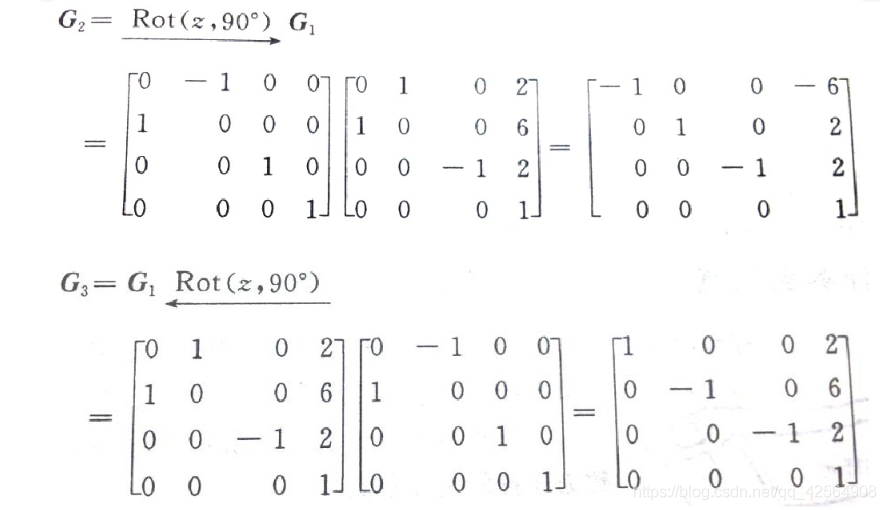
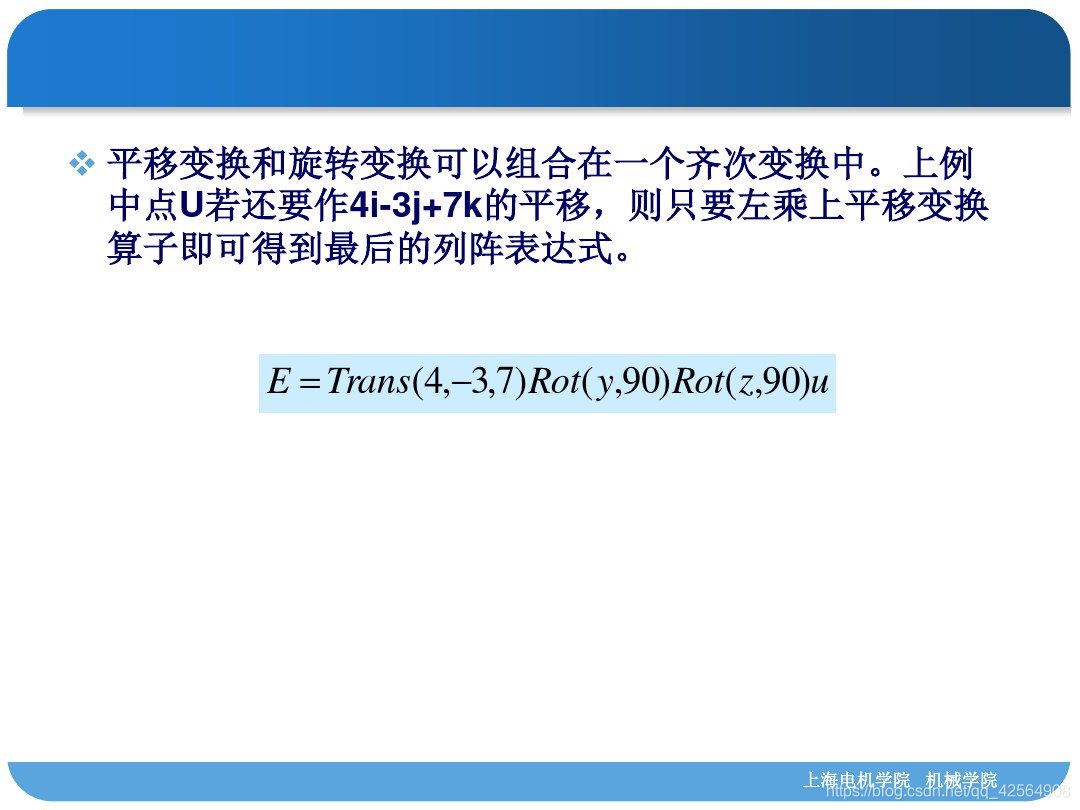
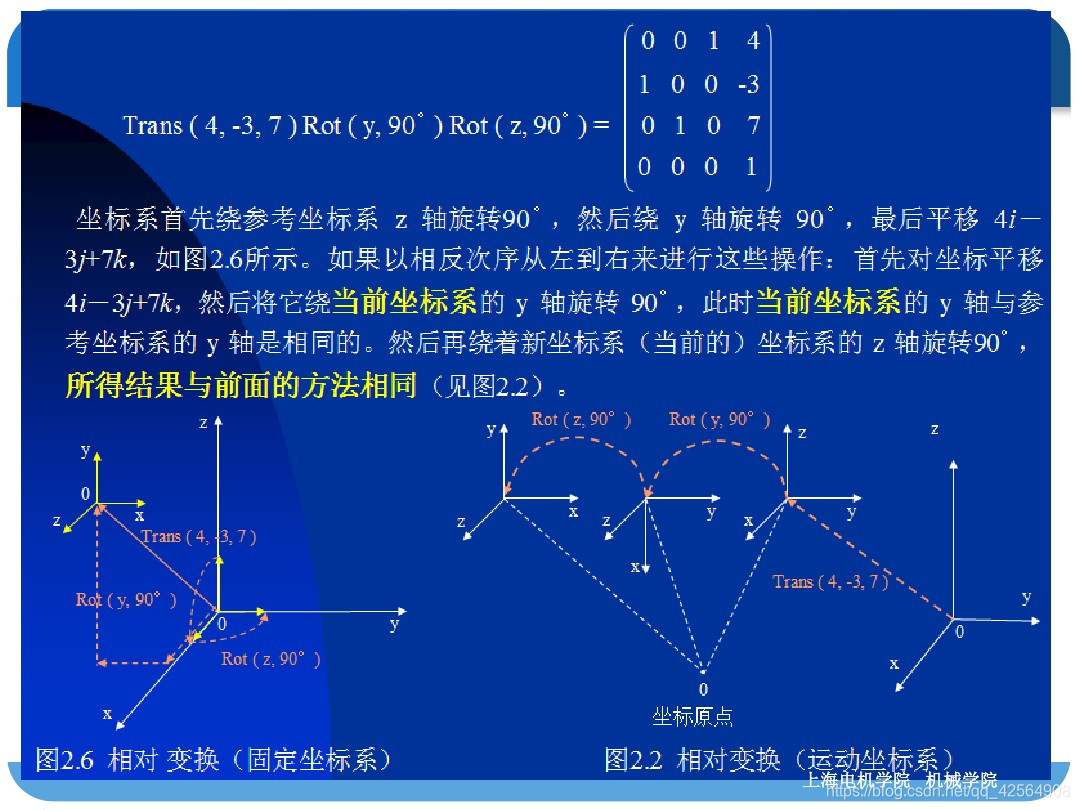
@1算子左乘:表示点的平移是相对固定坐标系进行的坐标转换。
@2算子右乘:表示点的平移是相对动坐标系进行的坐标转换。
@3该公式亦适用于坐标系的平移转换,物体的平移转换,如机器人手部的平移转换。

具体解题步骤如下(A’):
(因为是A相对于固定坐标系做平移,所以是左乘)
因为是A相对于动坐标系做平移,所以是左乘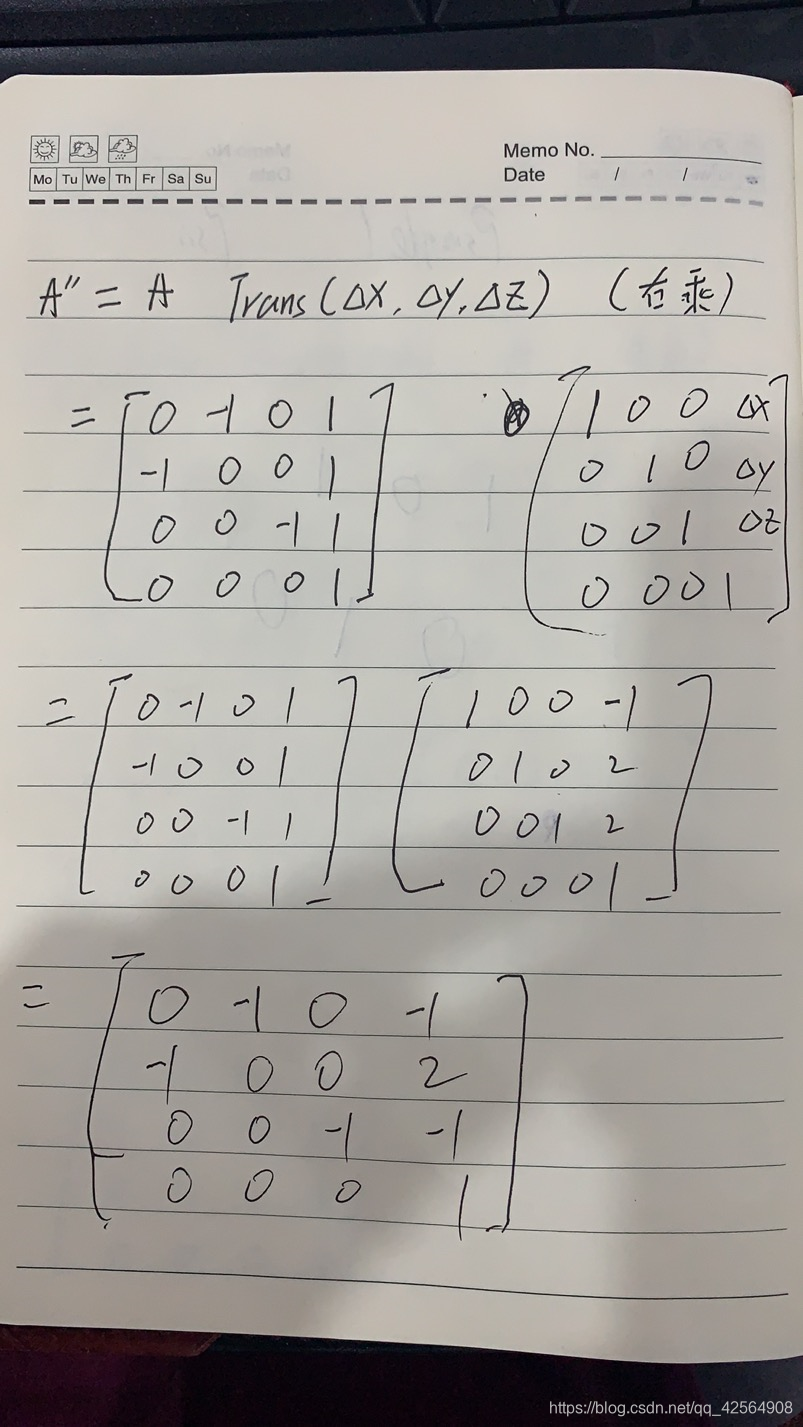
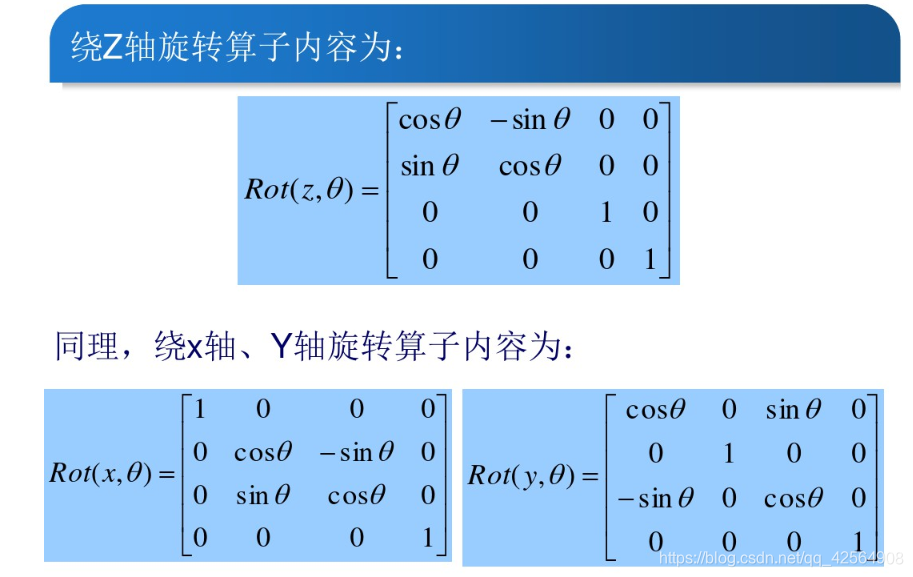
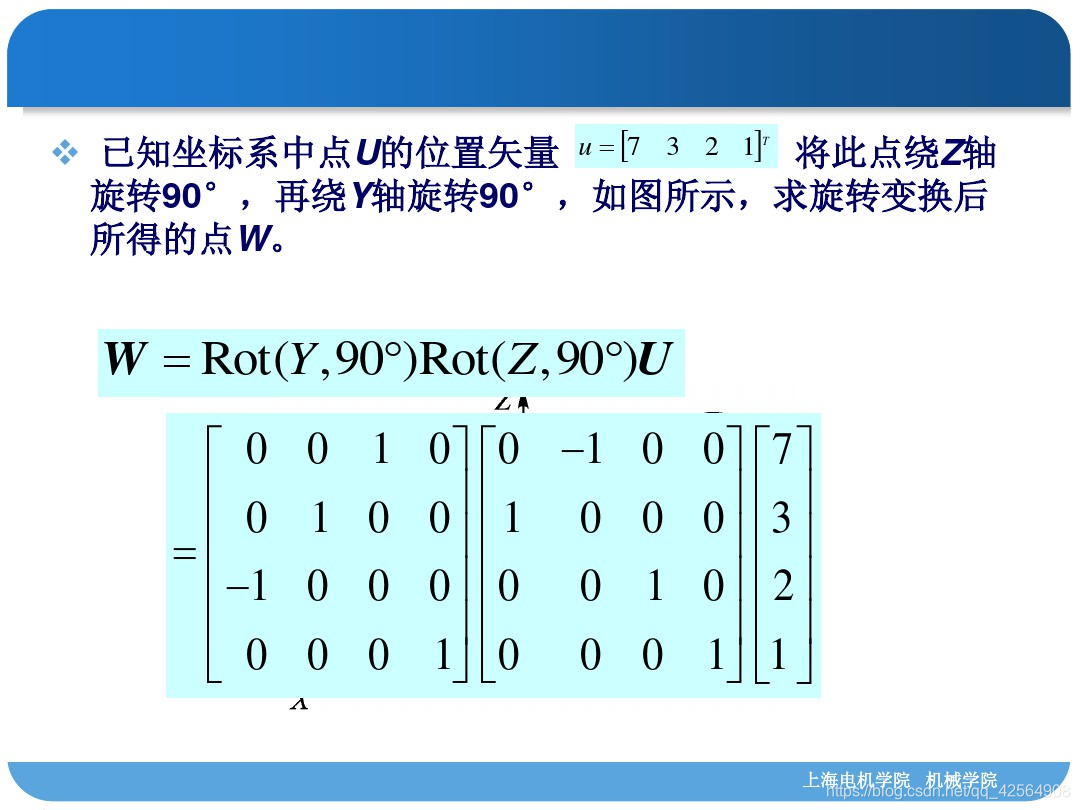
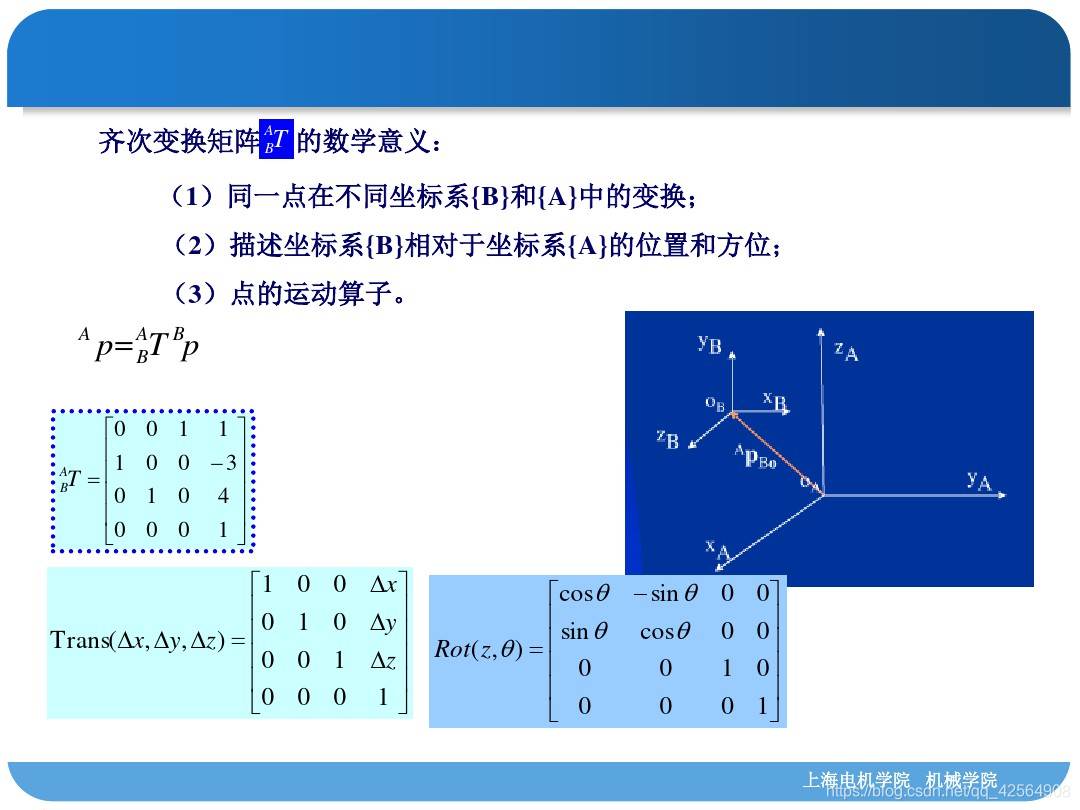
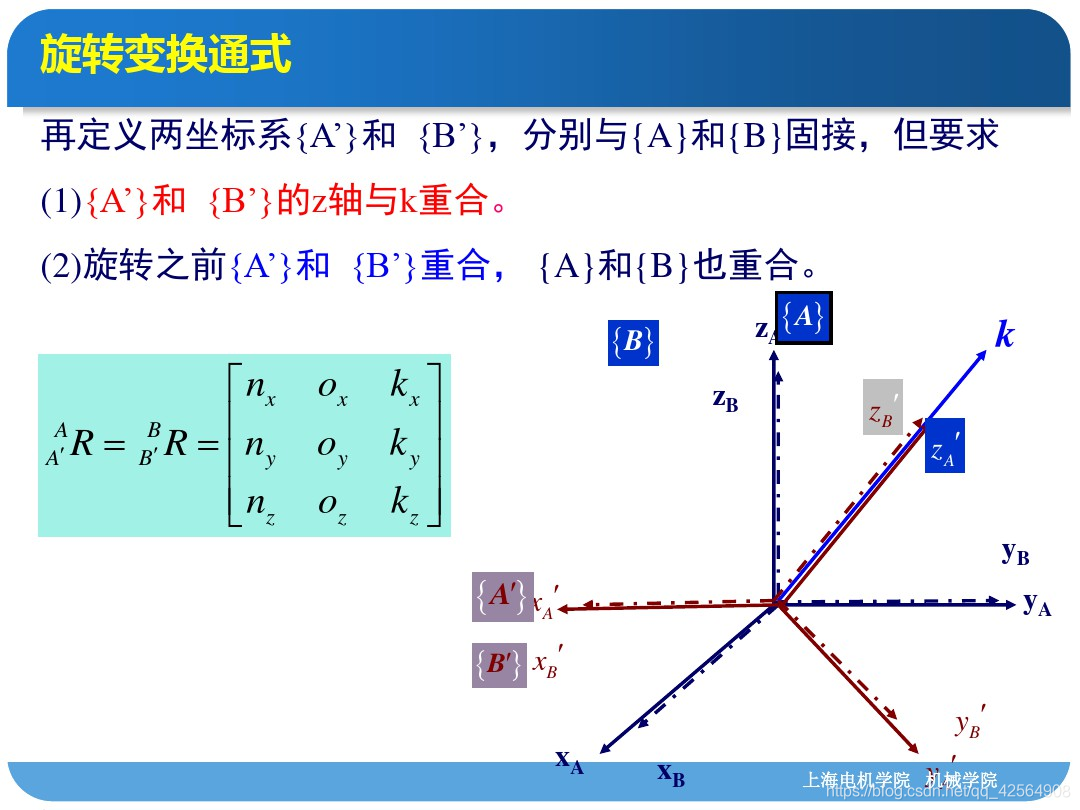
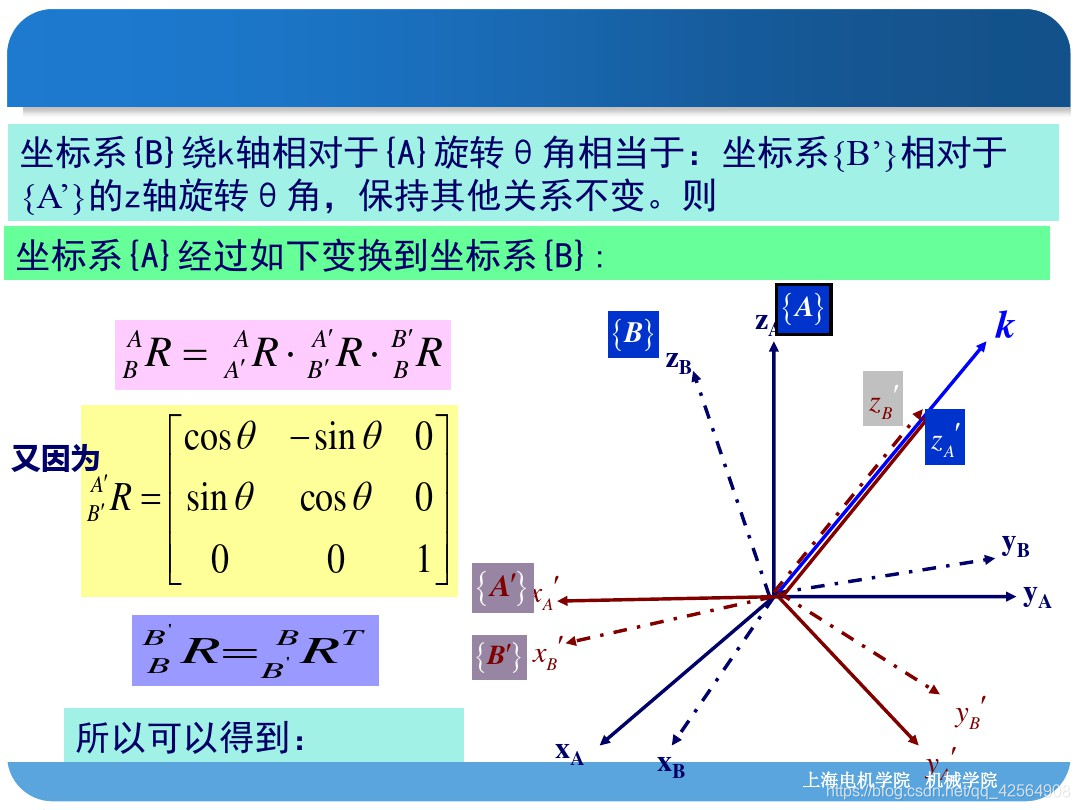
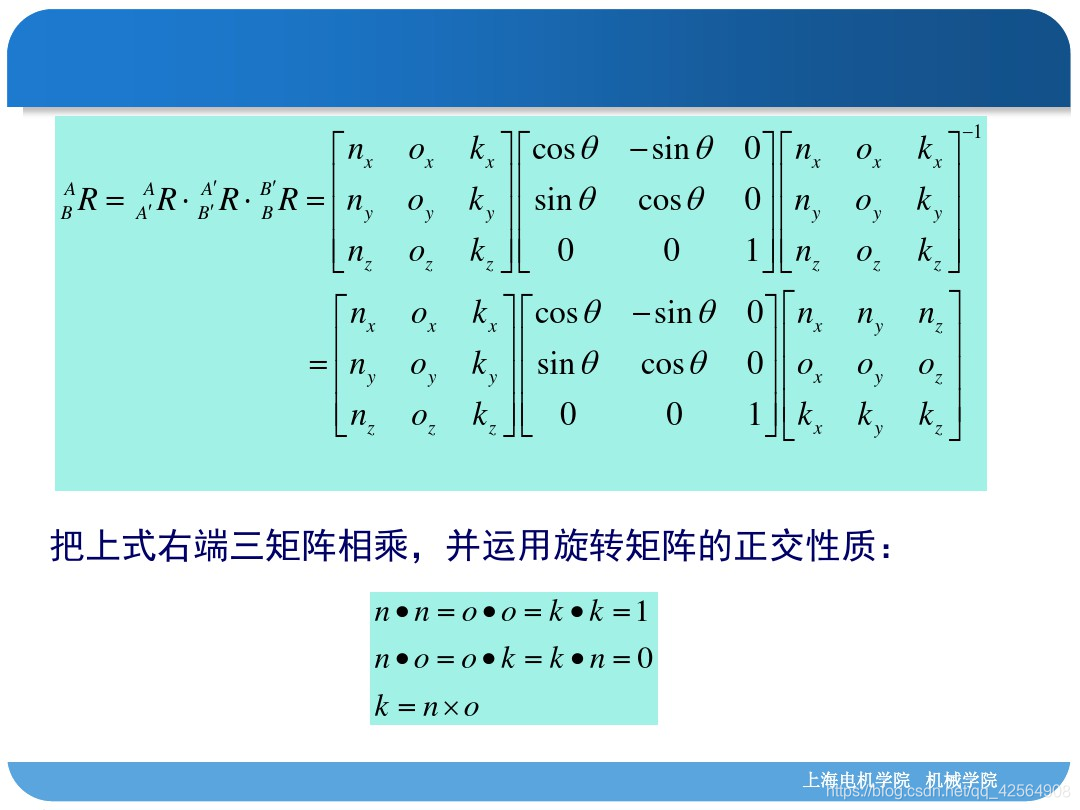
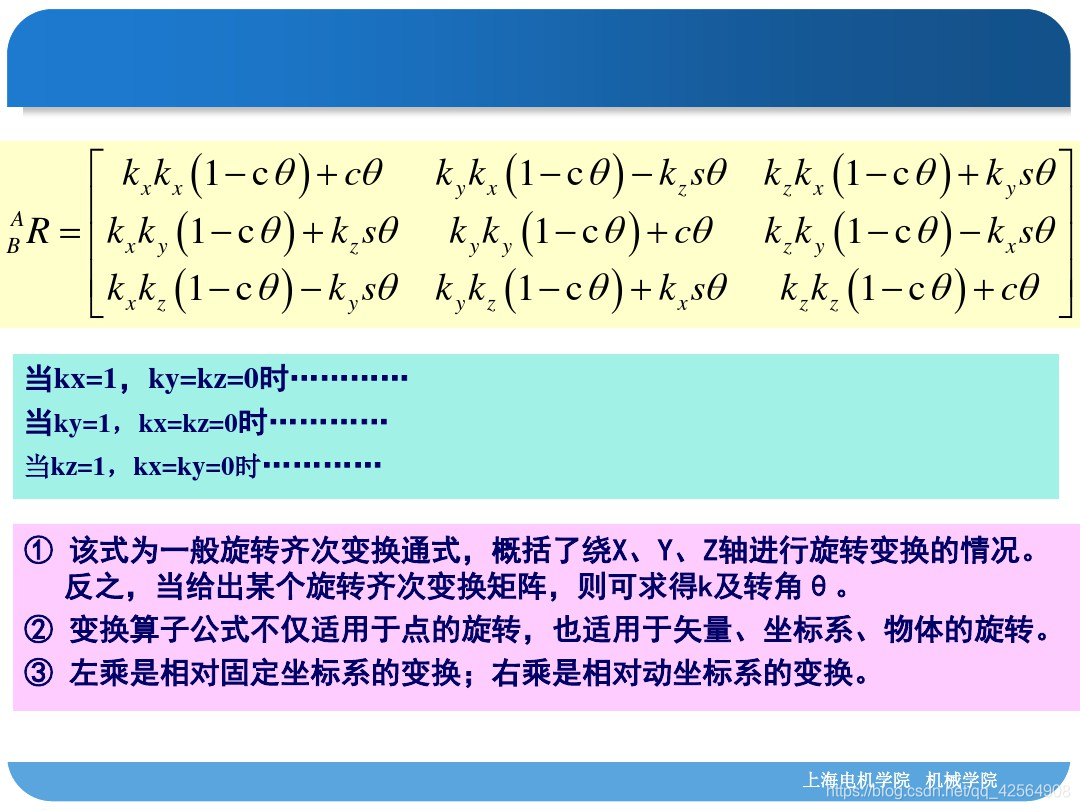
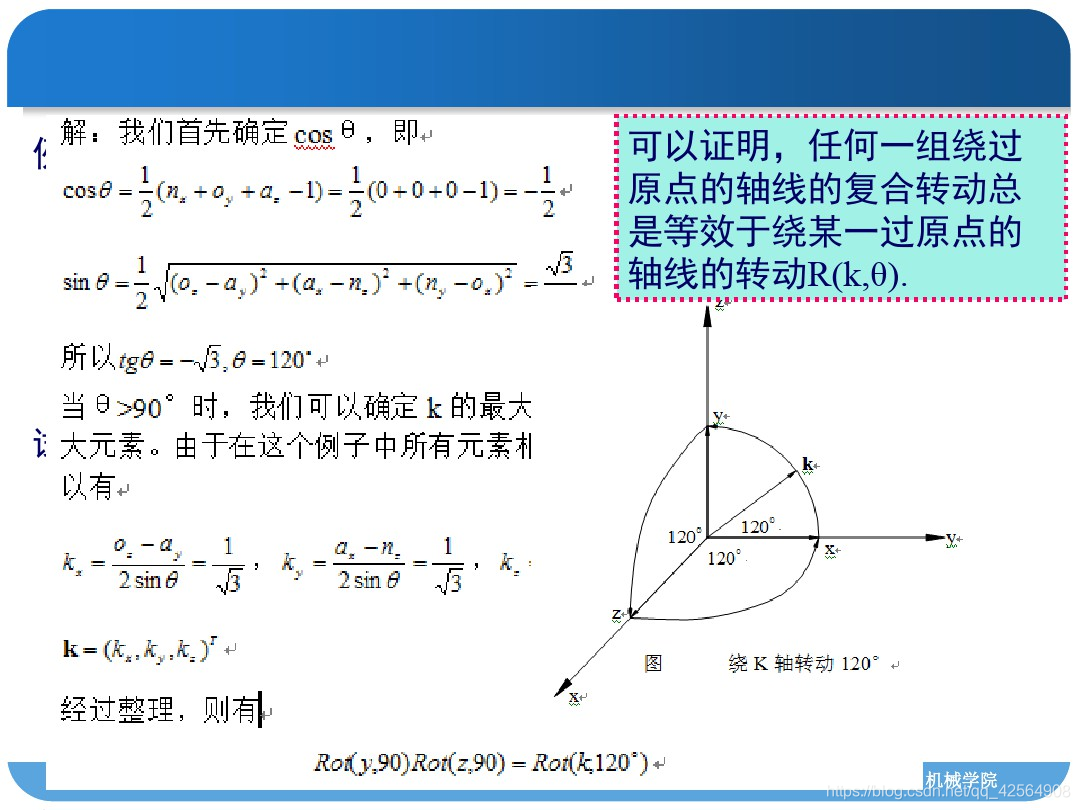
2.旋转的齐次变换
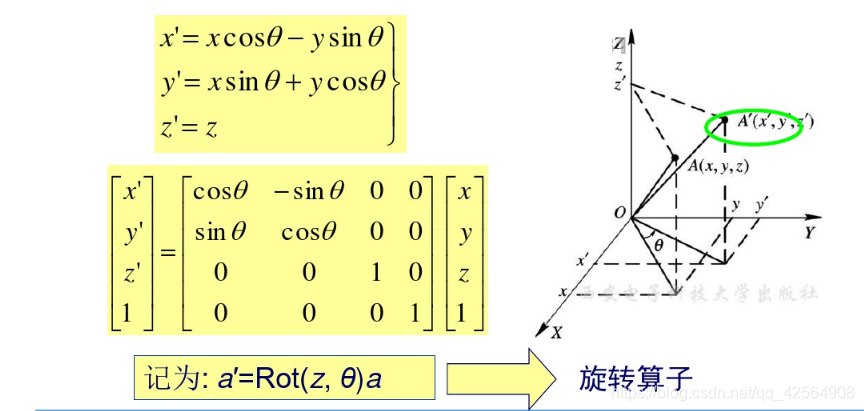
点在空间直角坐标系中的旋转如图所示,A(X,Y,Z)绕Z轴旋转sita角后至A’(X’,Y’,Z’),则A与A‘之间的关系为:

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 15
15 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)