智能车单车组之平衡控制理论分析篇
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档文章目录前言一、pandas是什么?二、使用步骤1.引入库2.读入数据总结前言参加完16届智能车竞赛单车拉力组,最终止步华南赛区,比赛成绩为58.7s,没能进国赛挺遗憾的,单车组作为16届新出的赛题,制作难度较大,尤其是车模的平衡控制。在此我打算总结一下我们大半年来做车的经验,让实验室的学弟学妹能少走一些弯路。(PS:16届单车组为室
目录
前言
参加完16届智能车竞赛单车拉力组,最终止步华南赛区,比赛成绩为58.7s,没能进国赛挺遗憾的,单车组作为16届新出的赛题,制作难度较大,尤其是车模的平衡控制。在此我打算总结一下我们大半年来做车的经验,让实验室的学弟学妹能少走一些弯路。
(PS:16届单车组为室外组,使用电磁循迹,依靠前轮打角来控制平衡,17届单车加入动量轮或者质量块辅助平衡,降低车模控制平衡的难度,但是加入动量轮后两种平衡方式的结合将是新的研究问题。而且大概率会改为室内组,采用摄像头循迹)
作者VX:xushikang3249955235(认真听讲的学渣)
参考博客:mini平衡自行车
一、电单车平衡控制原理
首先举一个实际生活中的例子来让大家对单车平衡控制有一个感性的认知:当我们在骑摩托车或者自行车时,如果车往左侧倾倒,我们就会控制车头往左打,车身就会回正,反之亦然。这个例子基本就是我们控制平衡的原理了,车往左倒,龙头往左打,车往右倒,龙头往右打。没有体会的同学建议骑自行车感受一下哈。
接下来我将从理论出发,简单介绍一下其中的原理。
二、电单车平衡分析
电单车在左右方向上不稳定,是一个很常见的物理模型,倒立摆。倒立摆的特性是:不稳定,只要偏离平衡位置,就会在重力的作用下更加偏离平衡的位置。
对电单车而言,只会在左右方向上倾倒,是一个一维的倒立摆。但是也有所不同,我们所熟悉的直线倒立摆,控制摆杆平衡的驱动力来自摆杆下面的小车,而对电单车而言,驱动力来自转向所带来的侧向加速度。
先简单介给出倒立摆物理模型
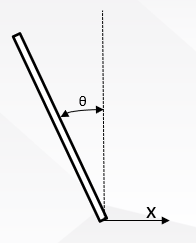
在电单车类似倒立摆模型建立过程中,忽略空气流动阻力,以及各种次要的摩擦阻力,将车身抽象成为均质刚性杆,如图2所示。本系统内部各相关参数定义如下:m——摆杆质量;l——摆杆转动轴心到杆质心的长度;I——摆杆转动惯量;x——底端位置;θ——摆杆与垂直向上方向的夹角。
系统的动力学非线性微分方程为:

当θ≪1时,可作θ=0,θ'=0附近线性化的近似处理。线性化处理后该系统的微分方程为:

分析方程可以看出θ的状态可以被x''影响。这个x''就是上文提到的侧向加速度。
但是,我们实际车模控制的是前轮的偏角,那么前轮偏角和侧向加速度又是如何联系起来的呢?
三、电单车动力学建模
我们将多自由度的整车模型简化成为二自由度模型。主要有以下假设:
1. 忽略转向系统的影响,直接以前轮转角作为输入;
3. 在分析中假设电单车沿x轴的速度不变。因此,电单车只有沿y轴的侧向运动与绕z轴的横摆运动这两个自由度。此外,电单车的侧向加速度限定在0.4g以下,轮胎侧偏特性处于线性范围。
4. 对于运动微分方程建立的假设:忽略地面对轮胎作用产生轮胎侧偏特性的改变,没有空气动力的影响。
这样所建立的模型(建模过程参考:汽车线性二自由度模型)
具体的运动学方程如下:

式中,m为整车质量;k1、k2分别为前、后车轮的侧偏刚度;a、b分别为前、后轴到质心的距离;v 为侧向速度;u 为横向速度;β为质心侧偏角;δ为前轮转角;ωr为横摆角速度。
此处的v'可以理解为上文的侧向加速度x''。δ为前轮打角,u为前进速度由第一个公式可以看出,侧向加速度受到前进速度u,横摆角速度Ωr以及前轮打角δ的影响,假设条件为u不变,且车向前直行,与v可以忽略,那么:
与-δ成正比。
总结
至此,证明了往左转龙头可以产生向右的回复力,向右转龙头可以产生向左的回复力。
同时也印证了跑直线时容易控制平衡,前轮打角与回复力近似线性关系,实际控制使用PD控制器就能起到效果。我们实际调试也证明了这点。
实际上,在比赛中,很多队伍在调试前期遇到的可以跑直线,但无法转弯,一转弯就倒地也是这个问题。PD控制器是单纯的线性控制器,实际系统工作在线性区间时勉强能发挥作用,但稳定性非常差,受到轻微外扰就容易打破稳定。
由公式可知,当转向时横摆角速度和侧向速度都不能忽略,使用PD控制器无法发挥作用。
整个电单车我们能控制的有前轮打角和后轮转速两个量,想要控制车的直立运行我们既要抵抗运行过程中受到的外部扰动(如震动颠簸等)也要想办法抵消内部扰动(车模匀速运行的情况下,以前轮打角作为控制量)。
至此,控制平衡的问题总结为:
- 如何通过改变前轮打角获得我们想要的回复力
- 如何通过前轮打角产生的回复力控制车身的平衡
未完待续。。。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 34
34 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)