拉格朗日对偶的实例计算
一、Lagrange 对偶函数1.1 拉格朗日函数1.2 拉格朗日对偶函数二、标准形式线性规划拉格朗日对偶minCTxs.t.Ax=bx≥0minC^Tx\\s.t. Ax=b\\x\ge0minCTxs.t.Ax=bx≥0构建拉格朗日表达式在标准优化形式中,f(x)≤0f(x)\le0f(x)≤0,因此将满足条件的第二条转换为−x≤0-x\le0−x≤0,那么函数表达式如下:L(x,λ,μ)=C
该书为凸优化教材
一、Lagrange 对偶函数
1.1 拉格朗日函数
1.2 拉格朗日对偶函数
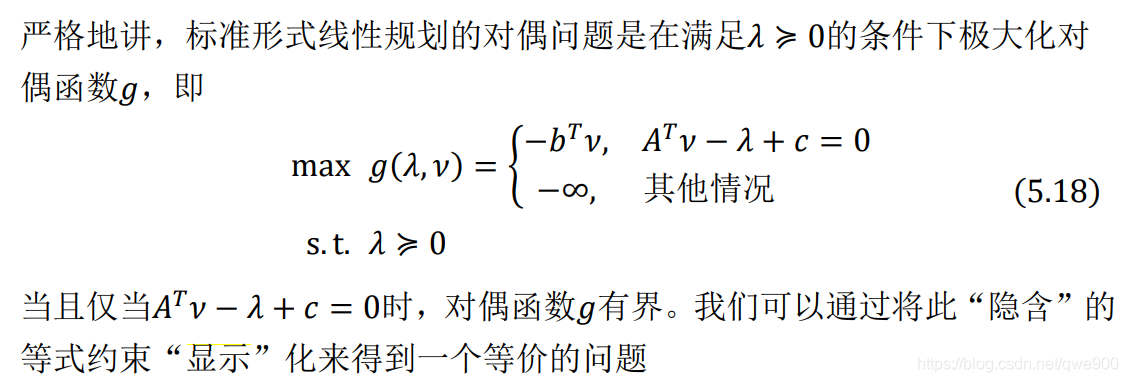
二、标准形式线性规划拉格朗日对偶
minCTxs.t.Ax=bx≥0 min C^Tx\\s.t. Ax=b\\x\ge0 minCTxs.t.Ax=bx≥0
- 构建拉格朗日表达式
在标准优化形式中,f(x)≤0f(x)\le0f(x)≤0,因此将满足条件的第二条转换为−x≤0-x\le0−x≤0,那么函数表达式如下:
L(x,λ,μ)=CTx+∑λi(−xi)+∑μi(Axi−b)=CTx−λTx+uT(Ax−b)=(CT−λT+μTA)x−μTb \begin{aligned} L(x,\lambda,\mu)&=C^Tx+\sum\lambda_i(-x_i)+\sum \mu_i(Ax_i-b)\\&=C^Tx-\lambda^Tx+u^T(Ax-b)\\&=(C^T-\lambda^T+\mu^TA)x-\mu^Tb \end{aligned} L(x,λ,μ)=CTx+∑λi(−xi)+∑μi(Axi−b)=CTx−λTx+uT(Ax−b)=(CT−λT+μTA)x−μTb
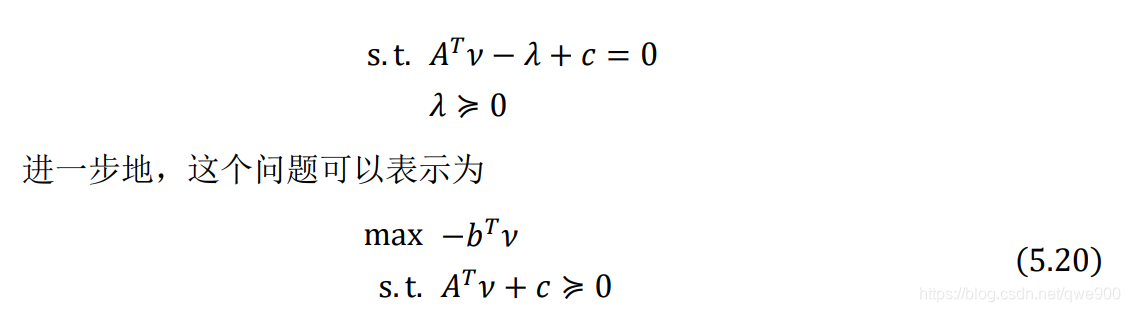
因此令∂L(x,λ,μ)∂x=0\frac{\partial L(x,\lambda,\mu)}{\partial x}=0∂x∂L(x,λ,μ)=0,那么L(x,λ,μ)=−uTbL(x,\lambda,\mu)=-u^TbL(x,λ,μ)=−uTb
因此其对偶函数如下: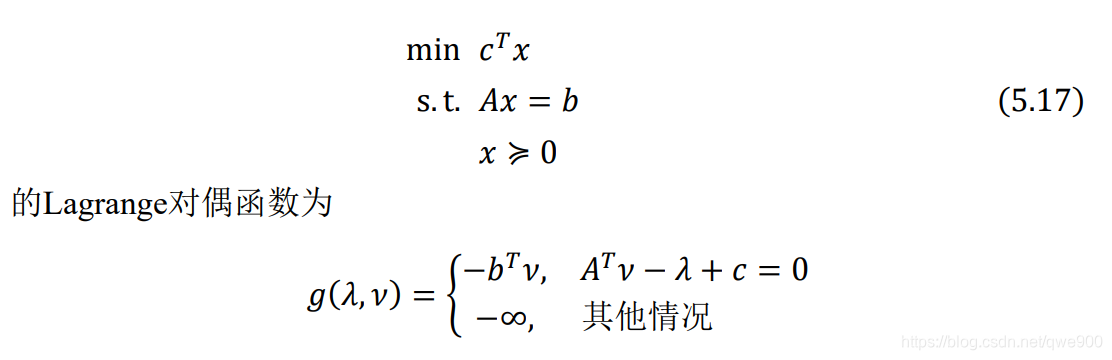

三、三个实例
3.1 线性方程的最小二乘解
minxTxs.t.Ax=b minx^Tx\\s.t. Ax=b minxTxs.t.Ax=b
第一步构造拉格朗日方程:
L(x,μ)=xTx+uT(Ax−b)∂L(x,μ)∂x=0,∂L(x,μ)∂μ=0 L(x,\mu)=x^Tx+u^T(Ax-b)\\ \frac{\partial L(x,\mu)}{\partial x}=0,\frac{\partial L(x,\mu)}{\partial \mu}=0 L(x,μ)=xTx+uT(Ax−b)∂x∂L(x,μ)=0,∂μ∂L(x,μ)=0
由于忘记矩阵的求导法则了,翻看一下矩阵分析,有如下两个公式
∂xTAx∂x=2Ax[注:A为对称阵] \frac{\partial x^TAx}{\partial x}=2Ax [注:A为对称阵]\\ ∂x∂xTAx=2Ax[注:A为对称阵]
∂bTx∂x=b[注:转置了一下] \frac{\partial b^Tx}{\partial x}=b [注:转置了一下] ∂x∂bTx=b[注:转置了一下]
因此求解计算如下
∂L(x,μ)∂x=2x+ATμ=0x=−12ATμ \begin{aligned} \frac{\partial L(x,\mu)}{\partial x}=2x+A^T\mu=0 \\ x=-\frac{1}{2}A^T\mu \end{aligned} ∂x∂L(x,μ)=2x+ATμ=0x=−21ATμ
那么代回原方程有
L(x,μ)=xTx+uT(Ax−b)=(−12ATμ)T(−12ATμ)+μT(A(−12ATμ)−b)=14μTAATμ−12μTAATμ−μTb=−14μTAATμ−μTb \begin{aligned} L(x,\mu)&=x^Tx+u^T(Ax-b)\\&=(-\frac{1}{2}A^T\mu)^T(-\frac{1}{2}A^T\mu)+\mu^T(A(-\frac{1}{2}A^T\mu)-b)\\ &=\frac{1}{4}\mu^TAA^T\mu-\frac{1}{2}\mu^TAA^T\mu-\mu^Tb\\&=-\frac{1}{4}\mu^TAA^T\mu-\mu^Tb \end{aligned} L(x,μ)=xTx+uT(Ax−b)=(−21ATμ)T(−21ATμ)+μT(A(−21ATμ)−b)=41μTAATμ−21μTAATμ−μTb=−41μTAATμ−μTb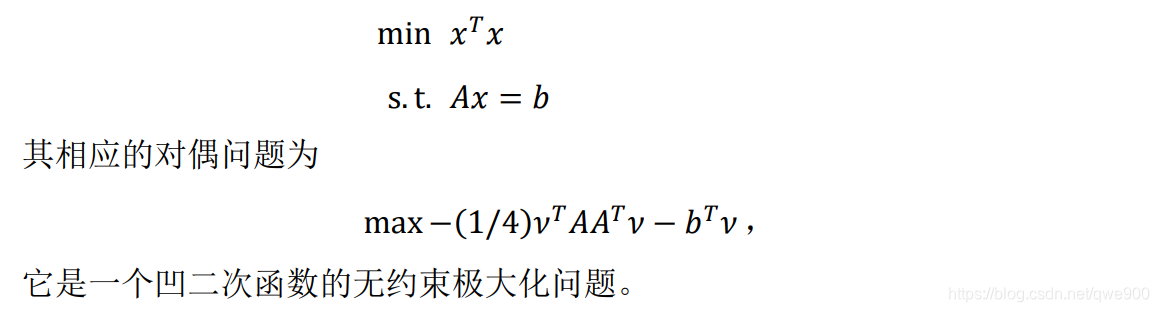
3.2 二次规划QP
minxTPxs.t.Ax≤b minx^TPx\\s.t. Ax \le b minxTPxs.t.Ax≤b
同样可以计算出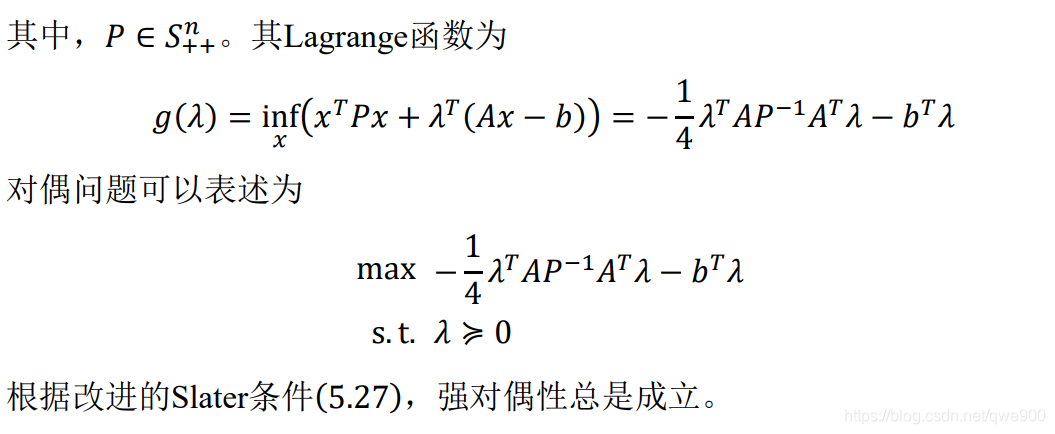
S++S_{++}S++表示正定矩阵,而S+S_{+}S+表示半正定矩阵。
推导时候由于正定矩阵是对称矩阵,那么有PT=PP^T=PPT=P
3.3 二次约束二次规划的QCQP
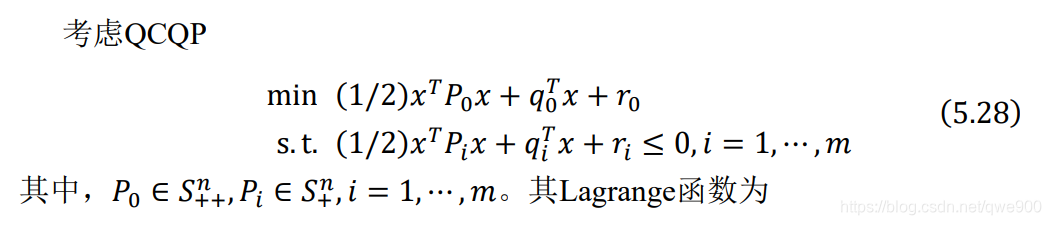
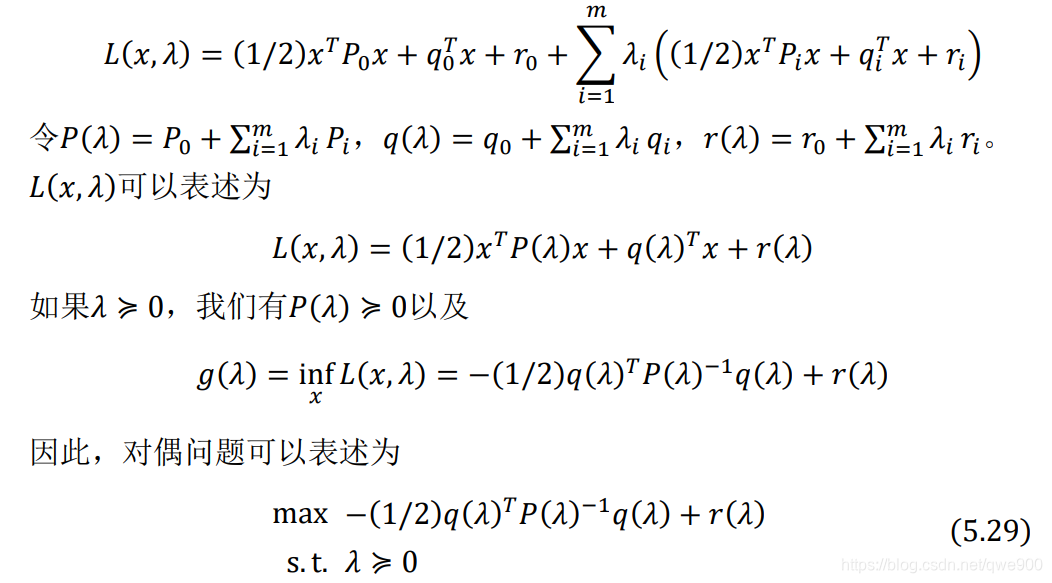
P(λ)P(\lambda)P(λ)是由两部分构成,而P0P_0P0和PiP_iPi都是正定的,可以理解成他们的特征根都大于0,从而推出P(λ)P(\lambda)P(λ)也是正定且对称矩阵,则P(λ)T=P(λ)P(\lambda)^T=P(\lambda)P(λ)T=P(λ)

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 9
9 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)