ROS配合VScode使用出现“无法打开源文件ros/ros.h”的问题的解决
把/opt/ros/kinetic/include/后面的**删了,竟然就不报错了,也能够正常使用代码补全了。2.删除自动在工作空间生成的.vscode下的c_cpp_properties.json。最后偶然在前面操作的基础上,再进入c_cpp_properties.json文件。(注意,kinetic目录名因ROS版本而异)1.安装VScode拓展:ROS。3.重新启动VScode。
·
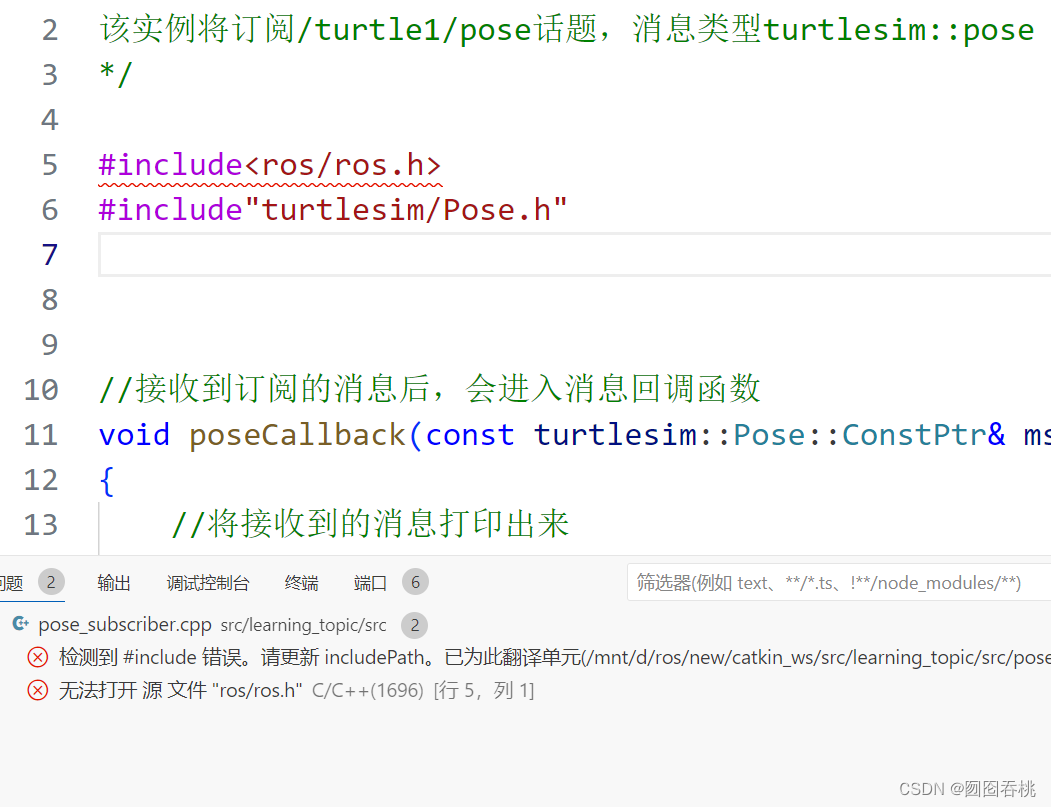
出现了如图所示的情况,照着网上的方法:
1.安装VScode拓展:ROS
2.删除自动在工作空间生成的.vscode下的c_cpp_properties.json
3.重新启动VScode
但是问题仍然存在
最后偶然在前面操作的基础上,再进入c_cpp_properties.json文件
把intelliSenseMode的值改成”clang-x64“
据网上说法说这样就可以用clang的代码补全了,但编译与其无关,仍用catkin_make
注意:如果没装clang可能要先安装
sudo apt-get install clang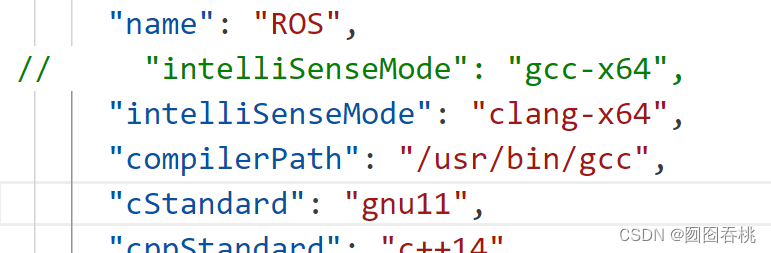
做到这里,问题仍未解决,但是再把/opt/ros/kinetic/include/后面的**删了,竟然就不报错了,也能够正常使用代码补全了
(注意,kinetic目录名因ROS版本而异)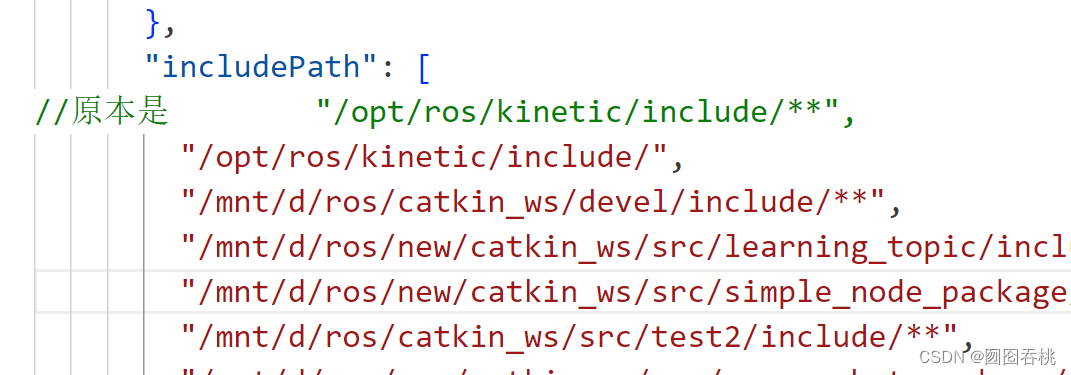
不明原理

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)