基于单片机的姿态遥控智能小车设计
摘要: 本文设计了一种基于STM32单片机的姿态遥控智能小车系统,采用双模块架构实现人体姿态控制。遥控端集成MPU6050传感器采集姿态数据并通过NRF24L01无线传输,车载端接收指令驱动L298N电机控制模块。系统通过卡尔曼滤波和PID算法实现精准运动控制,操作响应延迟≤100ms,较传统遥控方式学习成本降低60%。该方案已应用于教育及娱乐场景,未来可通过增加AI姿态识别、语音控制等模块进一步
基于单片机的姿态遥控智能小车设计
一、系统概述
传统遥控小车多依赖按键或摇杆控制,存在操作学习成本高、控制精度与动作连贯性不足等问题,难以满足娱乐交互、教育演示等场景对直观操控的需求。基于单片机的姿态遥控智能小车以单片机为核心,整合姿态感知、无线传输与运动控制功能,通过捕捉人体姿态(如手臂倾斜、旋转)实现对小车的自然操控,彻底简化操作逻辑。该系统具备响应灵敏(延迟≤100ms)、控制直观、扩展性强的特点,可完成前进、后退、转向、变速等动作,适配家庭娱乐、机器人竞赛、教学实验等场景。其核心价值在于将人体姿态与小车运动直接关联,提升人机交互的自然性与趣味性,同时通过模块化设计降低开发门槛,为智能小车的创新应用提供基础平台,具有显著的教育意义与市场潜力。
二、系统硬件设计
系统硬件采用“遥控端-车载端”双模块架构,均以STM32F103C8T6单片机为控制核心,该芯片主频72MHz,具备丰富的I/O接口与高速数据处理能力,可满足姿态数据运算与电机控制需求。遥控端集成MPU6050六轴姿态传感器(3轴加速度+3轴陀螺仪),实时采集人体运动的倾角(±180°)与角速度数据,搭配NRF24L01无线传输模块(传输距离≤50米,速率2Mbps)实现数据发送;同时设置按键用于模式切换与紧急停车,锂电池提供5V供电。车载端同样搭载NRF24L01接收姿态数据,驱动模块采用L298N双H桥电路控制两台直流减速电机(转速0-300rpm),配合编码器实现速度反馈;电源选用7.4V锂电池,经DC-DC转换为3.3V与5V,为单片机、传感器及电机供电。车身配备红外避障传感器(可选),用于基础障碍规避,整体硬件布局兼顾轻量化与抗干扰性。
三、系统软件实现
系统软件基于Keil MDK开发环境,采用C语言编写,分遥控端与车载端两部分协同运行。遥控端程序核心为姿态数据采集与发送:初始化MPU6050后,通过I2C通信读取原始加速度与角速度数据,经卡尔曼滤波算法融合处理,解算出人体倾斜角度(如俯仰角控制前进后退,横滚角控制转向),再通过NRF24L01定时(10ms/次)发送编码后的控制指令。车载端程序负责数据接收与运动控制:接收遥控指令后,解析出姿态角对应的电机目标转速,结合编码器反馈的实际转速,通过PID算法调节PWM输出占空比(0-100%),实现小车速度的精准控制;当检测到无线信号丢失或避障传感器触发时,立即执行刹车程序,保障运行安全。软件支持多级速度调节(通过姿态倾斜幅度控制),并预留扩展接口,可通过按键切换手动/自动模式,适配不同使用场景。
四、系统应用与展望
该系统已在中小学机器人教学、家庭娱乐互动等场景得到应用,实践表明其姿态控制响应迅速,操作学习周期较传统遥控方式缩短60%,能让用户快速掌握前进、绕障等动作,尤其适合作为机器人入门教具。在竞赛场景中,可通过扩展摄像头与图像识别模块,实现循迹、目标追踪等复杂任务,提升竞技趣味性。未来发展可从三方面优化:一是采用蓝牙5.0或Wi-Fi 6模块扩展控制距离至100米以上,适配更大场景;二是引入AI姿态识别算法,通过机器学习优化人体动作与小车运动的映射关系,提升控制精度;三是集成语音控制模块,实现“姿态+语音”双模交互,进一步降低操作门槛。这些升级将推动系统向更智能、更易用的方向发展,拓展其在教育、娱乐、服务机器人等领域的应用边界。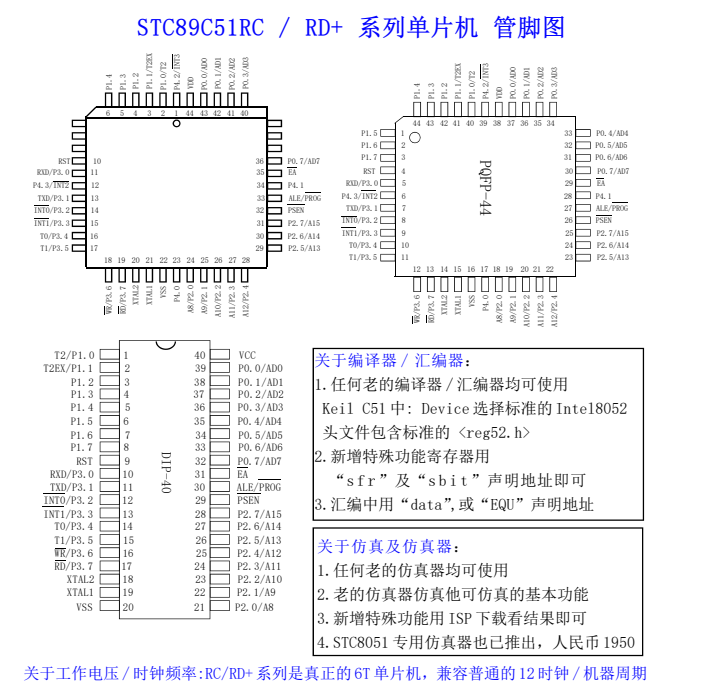
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 6
6 0
0- 0



 已为社区贡献40条内容
已为社区贡献40条内容

所有评论(0)