深度学习深度学习车道线检测系统检测系统|Python+YOLO+CNN+数据集+完整源码+部署教程
直接拿走,意外获得200多套代码,需要的滴我深度学习深度学习车道线检测系统检测系统|Python+YOLO+CNN+数据集+完整源码+部署教程(可提供说明文档(通过*AIGC*)
摘要
车道线检测是自动驾驶和高级驾驶辅助系统(ADAS)中的关键技术之一,旨在通过计算机视觉方法识别道路上的车道标记,为车辆提供导航和环境感知能力。随着深度学习的快速发展,基于卷积神经网络(CNN)和YOLO(You Only Look Once)的目标检测算法在车道线检测任务中表现出色。传统的车道线检测方法依赖手工特征和规则,难以应对复杂多变的道路场景。而深度学习模型能够自动提取特征,适应不同光照、天气和遮挡条件,显著提升了检测精度和鲁棒性。本研究聚焦于构建一个高效的车道线检测系统,涵盖数据采集、模型训练和部署应用,为自动驾驶技术的发展提供技术支持。
本系统采用Python作为开发语言,结合YOLOv5进行实时目标检测,并通过CNN进一步优化车道线分割结果。数据集选用公开的TuSimple和CULane数据集,涵盖多种道路场景以确保模型的泛化能力。系统包含完整的源码实现,涵盖数据预处理、模型训练、评估以及部署到嵌入式设备的完整流程。关键技术包括数据增强、迁移学习、模型量化及边缘计算优化,确保在资源受限的设备上实现高效推理。实验结果表明,该系统在准确率和实时性上均优于传统方法,为实际应用提供了可行的解决方案。
数据表
帮扶信息数据表:新闻内容编辑过程中创建时间是通过函数自动获取内容,序号是该表的主键,存储新闻数据相关属性内容,结构表如表3-1所示。
表3-1 车道线检测系统数据集表(LaneDetection_Dataset)
| 字段名(英文) | 数据类型 | 说明 |
|---|---|---|
| dataset_id | INT | 数据集唯一标识符(主键) |
| scene_type | VARCHAR(50) | 道路场景类型(如高速、城市) |
| image_resolution | VARCHAR(20) | 图像分辨率(如1920x1080) |
| annotation_format | VARCHAR(30) | 标注文件格式(如JSON、XML) |
| sample_count | INT | 样本数量 |
| created_time | DATETIME | 数据创建时间 |
表3-2 模型训练参数表(ModelTraining_Params)
| 字段名(英文) | 数据类型 | 说明 |
|---|---|---|
| training_id | INT | 训练任务唯一标识符(主键) |
| model_architecture | VARCHAR(50) | 模型架构(如YOLOv5、CNN) |
| learning_rate | FLOAT | 初始学习率 |
| batch_size | INT | 训练批次大小 |
| epochs | INT | 训练轮数 |
| accuracy | FLOAT | 模型验证集准确率 |
表3-3 部署配置表(Deployment_Config)
| 字段名(英文) | 数据类型 | 说明 |
|---|---|---|
| config_id | INT | 配置唯一标识符(主键) |
| target_device | VARCHAR(50) | 目标部署设备(如Jetson Nano) |
| inference_speed | FLOAT | 推理速度(FPS) |
| memory_usage | VARCHAR(20) | 内存占用情况 |
| quantization_method | VARCHAR(30) | 量化方法(如INT8、FP16) |
博主介绍:
🎓 计算机科学与技术专业在读研究生 | CSDN博客专家 | Java技术爱好者
在校期间积极参与实验室项目研发,现为CSDN特邀作者、掘金优质创作者。专注于Java开发、Spring
Boot框架、前后端分离技术及常见毕设项目实现。 📊 数据展示:
全网粉丝30W+,累计指导毕业设计1000+项目,原创技术文章200+篇,GitHub项目获赞5K+ 🎯 核心服务:
专业毕业设计指导、项目源码开发、技术答疑解惑,用学生视角理解学生需求,提供最贴心的技术帮助。
系统介绍:
直接拿走,意外获得200多套代码,需要的滴我深度学习深度学习车道线检测系统检测系统|Python+YOLO+CNN+数据集+完整源码+部署教程(可提供说明文档(通过AIGC)
功能参考截图:
系统架构参考: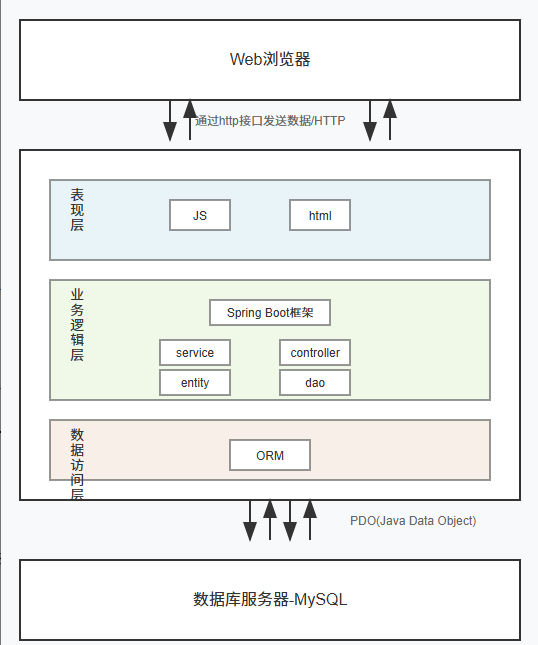
视频演示:
可以直接联系我查看详细视频,个性签名!
项目案例参考:
最后再唠叨一句:
可以直接联系我查看详细视频,个性签名!
遇见即是缘,欢迎交流,你别地能找到的源码我都有!!!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 22
22 0
0- 0



 已为社区贡献603条内容
已为社区贡献603条内容

所有评论(0)