Depthwise Convolution 和 Pointwise Convolution 和 Depthwise Separable Convolution
与,合起来被称作(参见Google的Xception),该结构和常规卷积操作类似,可用来提取特征,但相比于常规卷积操作,其参数量和运算成本较低。所以在一些轻量级网络中会碰到这种结构,如MobileNet。
文章目录
前言
Depthwise(DW) Convolution与Pointwise(PW) Convolution,合起来被称作Depthwise Separable Convolution(参见Google的Xception),该结构和常规卷积操作类似,可用来提取特征,但相比于常规卷积操作,其参数量和运算成本较低。所以在一些轻量级网络中会碰到这种结构,如MobileNet。
1. 常规卷积操作
对于一张尺寸大小为5×5、三通道彩色输入图片(shape为5×5×3)。经过3×3卷积核的卷积层(假设输出通道数为4,则卷积核shape为3×3×3×4),最终输出4个Feature Map,如果有same padding则尺寸与输入层相同(5×5),如果没有则为尺寸变为3×3。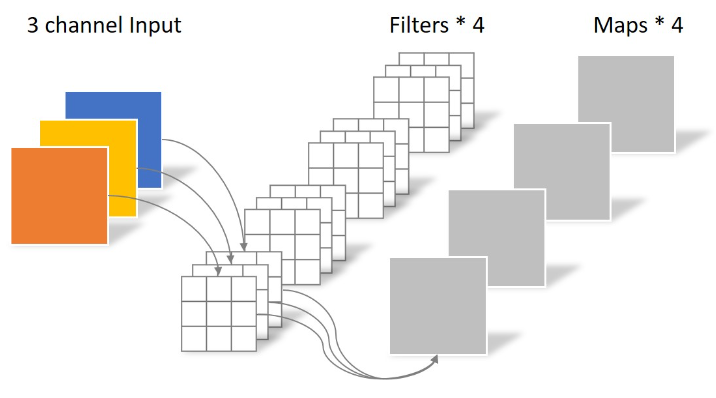
此时,卷积层共4个Filter,每个Filter包含了3个Kernel,每个Kernel的大小为3×3。因此卷积层的参数数量可以用如下公式来计算:
N s t d = 4 × 3 × 3 × 3 = 108 N_{std} = 4 × 3 × 3 × 3 = 108 Nstd=4×3×3×3=108
2. Depthwise Separable Convolution
Depthwise Separable Convolution是将一个完整的卷积运算分解为两步进行,即Depthwise Convolution与Pointwise Convolution。
2.1 Depthwise Convolution
不同于常规卷积操作,Depthwise Convolution的一个卷积核负责一个通道,一个通道只被一个卷积核卷积。上面所提到的常规卷积每个卷积核是同时操作输入图片的每个通道。
同样是对于一张5×5像素、三通道彩色输入图片(shape为5×5×3),Depthwise Convolution首先经过第一次卷积运算,不同于上面的常规卷积,DW完全是在二维平面内进行。卷积核的数量与上一层的通道数相同(通道和卷积核一一对应)。所以一个三通道的图像经过运算后生成了3个Feature map(如果有same padding则尺寸与输入层相同为5×5),如下图所示。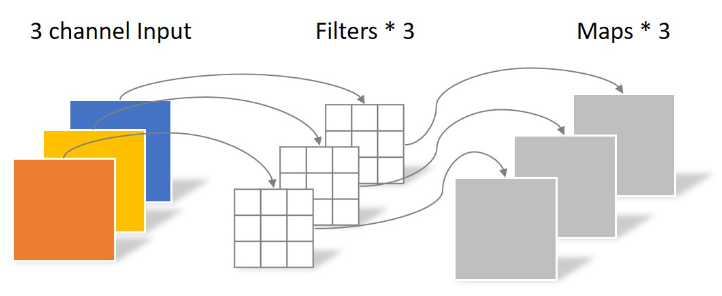
其中一个Filter只包含一个大小为3×3的Kernel,卷积部分的参数个数计算如下:
N d e p t h w i s e = 3 × 3 × 3 = 27 N_{depthwise} = 3 × 3 × 3 = 27 Ndepthwise=3×3×3=27
Depthwise Convolution完成后的Feature map数量与输入层的通道数相同,无法扩展Feature map。而且这种运算对输入层的每个通道独立进行卷积运算,没有有效的利用不同通道在相同空间位置上的feature信息。因此需要Pointwise Convolution来将这些Feature map进行组合生成新的Feature map。
2.2 Pointwise Convolution
Pointwise Convolution的运算与常规卷积运算非常相似,它的卷积核的尺寸为 1×1×M,M为上一层的通道数。所以这里的卷积运算会将上一步的map在深度方向上进行加权组合,生成新的Feature map。有几个卷积核就有几个输出Feature map。如下图所示。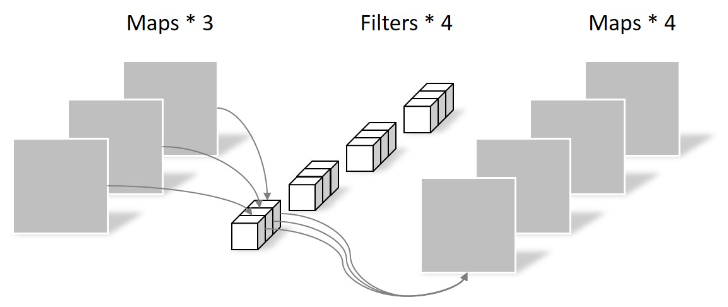
由于采用的是1×1卷积的方式,此步中卷积涉及到的参数个数可以计算为:
N p o i n t w i s e = 1 × 1 × 3 × 4 = 12 N_{pointwise} = 1 × 1 × 3 × 4 = 12 Npointwise=1×1×3×4=12
经过Pointwise Convolution之后,同样输出了4张Feature map,与常规卷积的输出维度相同。
3.参数对比
回顾一下,常规卷积的参数个数为:
N s t d = 4 × 3 × 3 × 3 = 108 N_{std} = 4 × 3 × 3 × 3 = 108 Nstd=4×3×3×3=108
Separable Convolution的参数由两部分相加得到:
N d e p t h w i s e = 3 × 3 × 3 = 27 N_{depthwise} = 3 × 3 × 3 = 27 Ndepthwise=3×3×3=27
N p o i n t w i s e = 1 × 1 × 3 × 4 = 12 N_{pointwise} = 1 × 1 × 3 × 4 = 12 Npointwise=1×1×3×4=12
N s e p a r a b l e = N d e p t h w i s e + N p o i n t w i s e = 39 N_{separable} = N_{depthwise} + N_{pointwise} = 39 Nseparable=Ndepthwise+Npointwise=39
相同的输入,同样是得到4张Feature map,Separable Convolution的参数个数是常规卷积的约1/3。因此,在参数量相同的前提下,采用Separable Convolution的神经网络层数可以做的更深。
4. 参考文章
https://blog.csdn.net/tintinetmilou/article/details/81607721
https://yinguobing.com/separable-convolution/

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 2
2 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)